技术特征:
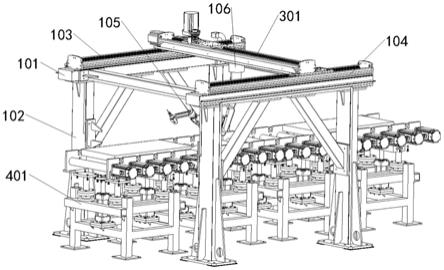
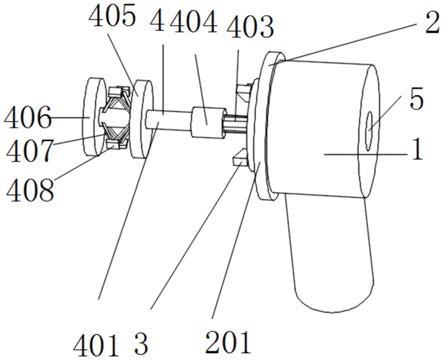
1.一种基于等离子切割的去板坯毛刺机器人系统,包括支撑组件以及安装在支撑组件间的传送组件,其特征在于:所述支撑组件包括横架与立架,所述横架上设置有驱动组件,所述驱动组件包括第一驱动件与第二驱动件,所述第一驱动件与所述第二驱动件对称设置,所述第一驱动件与所述第二驱动件结构相同;所述驱动组件上设置有滑块,所述滑块与滑轨配合连接,所述滑块上还配合连接有连接块,所述连接块上设置有电机固定架,所述电机固定架上安装有第一驱动电机,所述第一驱动电机配合连接有第一联轴器,所述第一联轴器配合连接有第一旋转轴,所述第一旋转轴配合连接有驱动齿轮,所述驱动组件上还设置有齿型导轨,所述齿型导轨与所述驱动齿轮相啮合;所述连接块上配合连接有第三驱动件,所述第三驱动件设置有第三驱动电机,所述第三驱动电机配合连接有第三联轴器,所述第三联轴器上配合连接有螺纹丝杆,所述螺纹丝杆上配合连接有滑动块,所述滑动块上配合连接有切割手;所述切割手倒挂设置在所述滑动块上,所述切割手上设置有旋转机构,所述旋转机构用于带动所述切割手旋转,所述切割手包括第一机械臂与第二机械臂,所述第二机械臂自由端端部配合连接有等离子切割机,所述等离子切割机与所述第二机械臂通过万向机构配合连接,所述等离子切割机实现万向转动,所述等离子切割机上设置有第一摄像机构。2.根据权利要求1所述的一种基于等离子切割的去板坯毛刺机器人系统,其特征在于:所述驱动组件上设置有挡块,所述挡块上设置有第一限位件,所述滑块上设置有第一传感器,所述第一传感器用于检测所述滑块的位置信息。3.根据权利要求1所述的一种基于等离子切割的去板坯毛刺机器人系统,其特征在于:所述第三驱动件上设置有第二限位件,所述滑动块上设置有第二传感器,所述第二传感器用于检测所述滑动块位置信息。4.根据权利要求1所述的一种基于等离子切割的去板坯毛刺机器人系统,其特征在于:所述第一机械臂与所述第二机械臂上设置有第三传感器,所述第三传感器用于检测所述第一机械臂与所述第二机械臂位置信息。5.根据权利要求1所述的一种基于等离子切割的去板坯毛刺机器人系统,其特征在于:所述等离子切割机上设置有第四传感器,所述第四传感器用于检测所述等离子切割机参数信息,所述参数信息包括等离子切割机的位置信息、切割速度信息以及切割角度信息。6.根据权利要求1所述的一种基于等离子切割的去板坯毛刺机器人系统,其特征在于:所述传送组件包括传送线,所述传送线上设置有挡板,所述挡板上间隔设置有轴承安装孔,所述轴承安装孔上安装有轴承,所述轴承配合连接有转动辊。7.根据权利要求6所述的一种基于等离子切割的去板坯毛刺机器人系统,其特征在于:所述转动辊配合连接有第四驱动电机,所述第四驱动电机用于带动所述转动辊转动,所述挡板上设置有前端光电传感器与后端光电传感器。8.根据权利要求6所述的一种基于等离子切割的去板坯毛刺机器人系统,其特征在于:所述传送线上还设置有升降机构,所述升降机构设置有气缸,所述气缸配合连接有推杆,所述推杆配合连接有升降台,所述升降台上设置有若干吸盘,所述升降台还配合连接有导向杆,所述导向杆起导向支撑作用。
9.根据权利要求1所述的一种基于等离子切割的去板坯毛刺机器人系统,其特征在于:所述横架底部配合连接有立架,所述立架通过螺栓连接于地面上,所述横架上设置有第二摄像机构,所述第二摄像机构用于检测板坯的位置信息、障碍物位置信息以及切割手位置信息。10.一种基于等离子切割的去板坯毛刺机器人系统切割方法,应用于权利要求1
‑
9任一所述的一种基于等离子切割的去板坯毛刺机器人系统,其特征在于,包括以下步骤:前端光电传感器识别到板坯后,转动辊开始做匀减速运动;后端光电传感器识别到板坯后,转动辊停止运动;升降机构接收信号将板坯匀速抬起,同时吸盘吸紧板坯;板坯到达加工位置后,升降机构停止上升,切割手移动至加工起点;等离子切割机开启,切割手按照设定路径移动,到达切割终点后,等离子切割机关闭;切割手从切割终点移回原点位置;升降机构匀速下降,将加工完的板坯送回传送线上;转动辊转动,把加工完的板坯传送至下一工站。
技术总结
本发明公开了一种基于等离子切割的去板坯毛刺机器人系统,包括支撑组件以及设置在支撑组件间的传送组件,支撑组件包括横架与立架,横架上设置有驱动组件,驱动组件包括第一驱动件与第二驱动件,第一驱动件与第二驱动件对称设置,第一驱动件与第二驱动件结构相同,驱动组件上设置有滑块,滑块与滑轨配合连接,滑块上还配合连接有连接块,连接块上设置有电机固定架,电机固定架上安装有第一驱动电机,第一驱动电机配合连接有第一联轴器,第一联轴器配合连接有第一旋转轴,第一旋转轴配合连接有驱动齿轮,拥有较高的传动精度,能够精准控制位置,切割后切割表面质量高并且具有较高的切割效率。切割效率。切割效率。
技术研发人员:彭剑辉 邱泽亮
受保护的技术使用者:苏州全光光伏科技有限公司
技术研发日:2021.08.23
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。