1.本发明涉及一种用于在飞行器中使用的电机的定子绕组布置。特别地,本发明涉及能够使用实心导体同时还改进电机的整体性能的定子绕组布置。
背景技术:
2.电动飞行器推进系统通常包括连接到电机的风扇(推进器)。电机通常由包括转子和定子的磁路部件的组件形成。众所周知,转子相对于定子的旋转导致转子产生的磁场与设置在定子上的绕组相互作用,从而产生感应电动势(emf)和/或电流。在永磁发电机中,转子的磁场由永磁体产生,随着定子绕组通过永磁体的移动磁场,永磁体会在定子绕组中感应出ac电压。
3.根据飞行器推进系统的要求,定子可以设置有多种不同类型的绕组布置。一种常见类型的绕组是集中绕组,其中定子的每一相应相的导体缠绕在围绕定子周缘分布的相邻槽对周围。然而,在传统的集中绕组布置中,不可能布置绕组以获得单位绕组系数,因为这样做将需要使槽数等于极数,这是不可行的。这种布置导致包括谐波(噪声和纹波)的输出转矩并且还导致效率降低。此外,很难使用实心条形导体,出于多种原因,使用实心条形导体可能是有利的。例如,在松散的圆线中,每个槽内的填充系数通常小于50%,而实心条形导体使每个槽内可以装入更多的铜,从而使更多的电流流过,从而获得更高的扭矩。此外,由于空气量较少,因此绝热较少,机器的热性能得到改善。由于每一相端部绕组之间的复杂跳跃网络,使用实心棒对于传统的集中绕组来说将是极其复杂的。
4.因此,需要一种集中绕组布置,以提高电机的整体性能,并且在需要时能够使用实心导体条。
技术实现要素:
5.本发明的第一方面提供了一种用于在飞行器中使用的电机,包括转子和定子,其中,转子包括多个转子极,定子包括多个相,其中,每一相应的相占据至少一个基本块,每一相的至少一个基本块包括以集中绕组构造缠绕在相应基本块的多个槽周围的相应相的成组导体,其中,每对相邻基本块的相应集中绕组之间的机械偏移角大于转子极间距,转子极间距是转子的相邻极之间的角度。
6.因此,用于定子每一相的集中绕组被组合在至少一个块中,以大于转子的相邻磁体之间的角度的角度间隔开。在这样做时,每一相的槽,即每个基本块内的槽,使得它们与转子极对齐,即与转子磁体对齐。因此,转子极和每一相线圈之间的磁链最大化,从而提供单位绕组系数,从而产生更高效的机器。此外,这种布置使得能够使用实心导体,这通过增加每个槽内的填充系数进一步有助于提高机器的性能。这使得更多的电流能在每个槽内流动,从而获得更高的扭矩,同时还改善了机器的热性能。
7.机械偏移角可以根据转子极间距、定子中的总槽数和定子中的基本块的数量来限定。
8.可以使用包括乘数和分母的第一等式计算机械偏移角,其中转子极间距、定子中的总槽数和定子中基本块的数量是第一等式的变量。
9.乘数可以限定为从总槽数中减去基本块的数量以输出第一乘数值,第一乘数值乘以转子极间距以输出第二乘数值,从常数中减去第二乘数值。
10.分母可以是基本块的数量。
11.更具体地说,机械偏移角δ
ph
可以通过以下等式计算:
[0012][0013]
其中:
[0014]
n
槽 是定子中的总槽数;
[0015]
n 是定子中基本块的数量;并且
[0016]
τ
p 是转子极间距。
[0017]
基本块的总数n可以等于3或6。例如,在三相机器中,每一相可以包括一个基本块或者它可以包括两个基本块。
[0018]
定子中的总槽数和总转子极数可以根据预定条件来选择,其中预定条件是机械偏移角和转子极间距的函数。
[0019]
预定条件可以要求总槽数和总转子极数对应于满足第二等式的机械偏移角和转子极间距,其中,转子极间距和机械偏移角是第二等式的变量。
[0020]
第二等式可以包括计算机械偏移角除以转子极间距的地板函数(floor function),其中地板函数将机械偏移角除以转子极间距的结果圆整到小于或等于该结果的最接近的整数,以输出第一个条件值。
[0021]
第二等式还可以包括将第一条件值乘以转子极间距以输出第二条件值。
[0022]
第二等式还可以包括从机械偏移角减去第二条件值以输出第三条件值。
[0023]
如果第三条件值等于转子极间距的分数,则可以满足预定条件。
[0024]
转子极间距的分数可以是转子极间距的三分之一或转子极间距的三分之二。
[0025]
更具体地,可以将第二等式限定为:
[0026]
或
[0027]
其中:
[0028]
δ
ph
是机械移位角;
[0029]
τ
p
是转子极间距;并且
[0030]
地板是将结果圆整到小于或等于该结果的最接近的整数的地板函数。
[0031]
在较佳的布置中,定子中的总槽数小于总转子极数。
[0032]
在一些布置中,每一相包括由单个端部导体连接的两个基本块。在这种情况下,每一相可分为两个直径相对的区域,其用作平衡转子的力,从而减少振动和噪音大小。此外,
每一相的两个基本块可以构造成提供彼此独立地起作用的单独的电力通道,这对于实现容错条件是有用的,其中如果一个电力通道发生故障,则另一个通道能够继续以全功率操作。
[0033]
在一些布置中,定子可包括三相。
[0034]
转子可包括多个永磁体。
[0035]
该组导体可以包括多个实心导体条。如上所述,实心导体条的提供是通过将每一相的集中绕组分组为基本块来实现的。
[0036]
转子极间距可以等于定子槽间距,定子槽间距是每个基本块内相邻槽之间的角度。如上所述,这意味着每个基本块内的槽与转子极对齐,从而使磁链最大化并获得单位绕组系数。
[0037]
每对相邻基本块的端部槽之间的角度可以大于每个基本块内的相邻槽之间的角度。即,相邻基本块的端部槽比每个基本块内的槽间隔得更远。
[0038]
定子可包括设置在多个槽中的每一个之间的多个定子齿,其中设置在每对相邻基本块之间的齿大于设置在每个基本块内的相邻槽之间的齿。
[0039]
在替代布置中,每个基本块可以包括多个槽,这些槽布置成容纳相应集中绕组的两个导体以限定内层和外层,并且其中,定子还包括布置成容纳一个导体的另一中间槽,该导体构造成提供连接每一相应基本块的内层和外层的返回路径。即,在双层布置中,另一个中间槽可以位于相邻的单元块之间,但是,位于其中的导体仅提供两层之间的返回路径,并不形成集中绕组本身的基本块的部分。
[0040]
返回路径可以构造成使得电流在与外层中的导体相同的方向上沿着内层中的导体行进。
[0041]
本发明的另一方面提供了一种包括如上所述的电机的飞行器推进系统。
附图说明
[0042]
通过仅借助示例并参考附图对本发明的实施例的以下描述,本发明的其它特征和优点将变得显而易见。
[0043]
图1是示出了具有传统集中绕组的现有技术电机的示意图;
[0044]
图2是示出了根据本发明的电机的示意图;
[0045]
图3是示出了根据本发明的电机的另一示意图;
[0046]
图4是示出了根据本发明的电机的另一示意图;
[0047]
图5是示出了根据本发明的电机的示意图;
[0048]
图6是示出了根据本发明的电机的示意图;
[0049]
图7是示出了根据本发明的电机的另一示意图;
[0050]
图8a是示出了根据本发明的计算绕组布置的方法的流程图;
[0051]
图8b是示出了根据本发明的绕组布置的示例;
[0052]
图9a是是示出了根据本发明的计算绕组布置的方法的流程图。
[0053]
图9b是示出了根据本发明的绕组布置的示例;
[0054]
图10是包括根据本发明的电机的飞行器推进系统的示意图。
具体实施方式
[0055]
图1示出了具有集中绕组布置的现有技术三相电机100的示例,其包括转子102和定子108。转子102包括旋转部件104,较佳地为铁磁护铁的形式,旋转部件104被围绕其周缘分布的永磁体106阵列包围。电机100具有的极数等于转子102上的永磁体106的数量。定子108包括磁性定子芯110和多个纵向槽112,纵向槽112围绕定子108的周缘均匀分布并且在纵向轴线的方向上延伸穿过定子芯110。槽112被多个定子齿116隔开。定子108还包括用于三相(表示为a、b和c)中的每一相的多个集中绕组。对于每一相,多个导体114围绕六对相邻槽112缠绕,这六对相邻槽112围绕定子108的周缘均匀分布,并通过端部绕组118连接在一起。如能从图1中看出的,这导致了复杂的端部绕组118的网络,以连接每一相(a、b和c)的所有线圈。在图1的绕组布局120中,实心点122表示这样布置的导体,该导体布置为使得电流在第一方向(即,从如图1中所见的页面出来)上沿一个或多个导体行进,而交叉124表示这样布置的导体,该导体布置为使得电流在与第一方向相反的第二方向(即进入如图1中所见的页面)上沿着一个或多个导体行进。应当理解,这些符号的含义适用于本文描述和图示的所有绕组布局。
[0056]
图1示出了具有36槽和42极的电机100,其基于具有12槽和14极的电机的基本绕组结构乘以系数3。因此,在现有技术的集中绕组中,不同的绕组布置可以通过将基本槽和极布置乘以整数来确定,例如,通过将12槽/14极或9槽/10极布置乘以整数来确定。这不是本发明的情况,这将在以下描述中变得明显。
[0057]
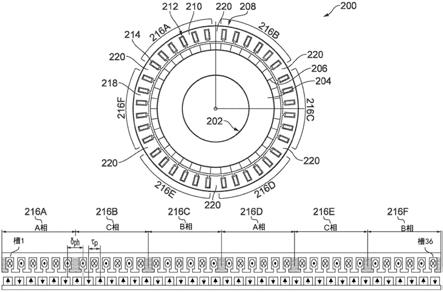
图2和图3示出了根据本发明的电机200的一个示例,其同样包括转子202和定子208。如前所述,转子202包括旋转部件204,较佳地为铁磁护铁的形式,旋转部件204被围绕其周缘分布的永磁体206阵列包围。
[0058]
如前所述,电机中的极数与永磁体206的数量直接相关。两个相邻极的中心之间的周向距离,即两个相邻转子磁体206之间的角度,被称为转子极间距。
[0059]
具体地,转子极间距τ
p
的计算公式为:
[0060][0061]
其中:
[0062]
2p是转子的总极数。
[0063]
在此,应当理解,p指的是极对的数量。在图2所示的示例中,转子202包括38个永磁体206,即总极数为38。
[0064]
如前所述,定子208包括磁性定子芯210和多个纵向槽212,这些纵向槽212在纵向轴线方向上延伸穿过定子芯210。在图2所示的示例中,定子208包括36个槽212。定子208还包括用于三相(表示为a、b和c)中的每一相的多个集中绕组,如在图2的绕组布局222中进一步示出的。对于每一相,绕组被分组使得多个导体214围绕槽212缠绕,以形成集中绕组的两个基本块216a
‑
216f,每个槽212构造成接纳单个导体214,其作为单层绕组已知。在该示例中,a相的导体214缠绕在标记为216a和216d的块中的槽212周围,b相的导体214缠绕在标记为216c和216f的块中的槽212周围,而c相的导体214缠绕在标记为216b和216e的块中的槽212周围。因此,每一相被分成两个直径相对的区域,这又具有平衡转子202的力的效果,从而减少振动和噪音的大小。类似地,每一相的两个不同区域可用于提供彼此独立作用的单
独电力通道。这对于冗余和实现容错条件很重要,如果一个电力通道出现故障,则另一个电力通道能够继续以全功率操作。此外,由于对于每一相在两个基本块216a
‑
216f的端部绕组之间仅需要单跳,该布置使得能够使用实心条形导体。
[0065]
在每个基本块216a
‑
216f内,槽212被多个第一尺寸的定子齿218隔开,使得槽间距τ
s
,即相邻槽212之间的角度,等于转子极间距,τ
p
,如图3所示。这确保了从转子202产生的整个磁通与定子208中的绕组形成的线圈链接,即,磁链最大化,因此绕组系数等于一。通过传统的集中绕组不可能获得这种完美对齐,因此绕组系数将始终小于一。实际上,三相单层传统集中绕组的最高基本绕组系数是0.966。例如,具有12个槽和14个极并具有传统集中绕组布置的电机,图1的示例所基于的基本绕组结构,具有单层绕组系数0.966和双层绕组系数0.933。相比之下,基于本文所述的新绕组布置,具有12个槽和14个极的电机具有单位绕组系数。
[0066]
如图3所示,绕组的相邻基本块216a
‑
216f机械偏移角度δ
ph
。角度δ
ph
大于基本块216a
‑
216f内的转子极间距和槽间距以适应三相之间的120
°
电气偏移。在该示例中,这是通过在相邻基本块216a
‑
216f的端部槽之间提供大齿220来实现的。因此,在这种布置中,槽的数量总是少于极的数量。
[0067]
更具体地,通过以下来计算机械偏移角δ
ph
:
[0068][0069]
其中:
[0070]
n
槽 是定子208中槽212的总数;
[0071]
n 是定子208中基本块216a
‑
216f的数量,等于3或6;并且
[0072]
τ
p
是转子极间距。
[0073]
槽212的数量n
槽
越接近极数2p,机器性能越高。例如,如图2所示的具有36个槽和38个极的机器,将比具有36个槽和40个极的机器性能稍好,如下面将参考图4所述。相反,随着块216a
‑
216f之间的机械偏移角δ
ph
增加,性能会降低。
[0074]
因此,必须选择槽212的数量和极206的数量,使得对于给定的(n
槽
,2p),当n
槽
小于2p时,必须满足以下条件:
[0075][0076]
其中:
[0077]
δ
ph
是机械偏移角;
[0078]
τ
p
是转子极间距;并且
[0079]
地板)是将值圆整到小于或等于该元件的最接近的整数的地板函数。
[0080]
以图2所示的电机200为例,其包括36个槽212和38个永磁体206,并且具有六个基本块,n=6。
[0081][0082][0083][0084][0085]
因此,由于在上面的示例中τ
p
=9.47
°
;并且τ
p
/3(圆整到小数点后2位)给出与等式[6]相同的结果,这个极和槽的数量是可行的。
[0086]
根据上述计算方法确定给定数量的转子磁体和槽是可行的,然后可以确定具体的绕组布局。为了根据本方法确定电机的绕组布局,使用一系列计算来评估给定数量的槽和极所需的绕组布置,以适应三相之间的120
°
电气偏移,正如现在将要描述的。图8a示出了在六个基本块(n=6)的情况下确定绕组布局的方法800。在此,可以看出方法800包括一系列计算步骤802、806、810、814,其使用给定数量的转子磁体的转子极间距τ
p
来基于槽的数量确定所需的绕组布局804、808、812、816。在一个示例中,对于具有六个基本块,n=6的机器,计算步骤802、806、810、814基于保持三相之间的120
°
电相位偏移的条件,每个块跨越60
°
的机械角度。以图2为例,其中电机200包括36个槽212和38个转子磁体206,可以看出,转子极间距满足第一计算802如下:
[0087][0088][0089][0090]
然后使用槽212的数量来确定绕组布局804,这确保对于给定数量的槽和极,获得三相a、b和c之间的正确电偏移。在图2的情况下,包括36个槽212,得到的构造要求每个基本块包括6个槽212,如由图8b中所示的绕组布局818进一步示出的。
[0091]
图4示出了根据本发明的电机400的另一示例,其同样包括转子402和定子408。如前所述,转子402包括旋转部件404,较佳地为铁磁护铁的形式,旋转部件404被围绕转子的周缘分布的永磁体406阵列包围。
[0092]
如前所述,定子408包括磁性定子芯410和多个纵向槽412,这些纵向槽412在纵向轴线方向上延伸穿过定子芯410。定子408还包括用于三相(表示为a、b和c)中的每一相的多个集中绕组,如在绕组布局422中进一步示出的。对于每一相,绕组被分组使得多个导体414围绕槽412缠绕,以形成集中绕组的两个基本块416a
‑
416f,每个槽412构造成接纳单个导体
414,其作为单层绕组已知。在该示例中,a相的导体414缠绕在标记为416a和416d的块中的槽412周围,b相的导体414缠绕在标记为416c和416e的块中的槽412周围,而c相的导体414缠绕在标记为416c和216f的块中的槽412周围。与图2的示例一样,每一相被分成两个直径相对的区域,这又具有平衡转子402的力的效果,从而减少振动和噪音的大小。在该示例中,机器400包括36个槽412和40个永磁体406。
[0093]
如前所述,槽数和极数的可行性可以使用上面的等式[1]到[3]来验证。
[0094]
图4的电机400包括36个槽412、40个永磁体406和六个基本块,n=6。
[0095][0096][0097][0098][0099]
因此,由于在上面的示例中τ
p
=9
°
;并且2τ
p
/3给出与等式[13]相同的结果,这个极和槽的数量是可行的。
[0100]
如前所述,已经确定给定数量的转子磁体和槽是可行的,然后可以使用图8a所示的方法800来确定具体的绕组布置。在图4的示例中,其中电机400包括36个槽412和40个转子磁体406,可以看出,转子极间距满足第二计算806如下:
[0101][0102][0103][0104]
然后使用槽412的总数量来确定绕组布局808,这确保对于给定数量的槽和极,获得三相a、b和c之间的正确电偏移。在图4的情况下,包括36个槽412,所得构造要求每个基本块包括6个槽412,如绕组布局422所示。
[0105]
图5示出了根据本发明的电机500的另一示例,其同样包括转子502和定子508。如前所述,转子502包括旋转部件504,较佳地为铁磁护铁的形式,旋转部件504被围绕其周缘分布的永磁体506阵列包围。在该示例中,转子502包括16个永磁体506。
[0106]
如前所述,定子508包括磁性定子芯510和多个纵向槽512,这些纵向槽412在纵向轴线方向上延伸穿过定子芯510。在该示例中,定子508包括15个槽512,并且每个槽512构造成接纳单个导体514。定子508还包括用于三相(表示为a、b和c)中的每一相的多个集中绕组,如在绕组布局522中进一步示出的。对于每一相,绕组再次被分组,然而,在该示例中,用于每一相的导体514围绕槽512缠绕以形成集中绕组的单个基本块516a
‑
516c。更详细地,a相的导体514缠绕在标记为516a的块中的槽512周围,b相的导体514缠绕在标记为516c的块
中的槽512周围,而c相的导体514缠绕在标记为516b的块中的槽512上。具有n=3的这种布置对于实心条形导体的使用特别有利,因为每一相的部分之间没有跳跃,因为它们都被分组在单个基本块516a
‑
516c中。
[0107]
此外,对于奇数个槽512,中性连接部可以移到机器的背部(如图5所示),并且正侧(如图5所示)将只有绕组端子(电源条)。这与现有技术的布置不同,因为在任何常规绕组中,中性连接部和绕组端子位于芯部510的同一纵向端部(例如,如图5所示的“前侧”)处,这导致体积庞大和不平衡的端部绕组。
[0108]
在每个基本块516a
‑
516c内,槽512被多个第一尺寸的定子齿518隔开,其中槽间距τ
s
等于转子极间距τ
p
。与图2至图4所示的示例一样,为了以这种方式对每一相的集中绕组进行分组,相邻基本块516a
‑
516c的集中绕组之间的机械偏移角δ
ph
大于基本块516a
‑
516c内的转子极间距和槽间距。在该示例中,这同样是通过在相邻基本块516a
‑
516f的端部槽之间提供大齿520来实现的。
[0109]
如前所述,槽数和极数的可行性可以使用上面的等式[1]到[3]来验证。图5的电机500包括15个槽512、16个永磁体506和三个基本块,n=3。
[0110][0111][0112][0113][0114]
因此,由于在上面的示例中τ
p
=22.5
°
;并且τ
p
/3给出与等式[20]相同的结果,这个极和槽的数量是可行的。
[0115]
在确定给定数量的转子磁体和槽是可行的之后,为了适应三相之间的120
°
电偏移,给定数量的槽和极所需的特定绕组布置然后可以使用如图9a所示的方法900确定。图9a示出了在三个基本块(n=3)的情况下确定绕组布局的方法900。在此,可以看出方法900包括一系列计算步骤902、906,其使用给定数量的转子磁体的转子极间距τ
p
来基于槽的数量确定所需的绕组布局904、908。对于具有三个基本块、n=3的机器,计算步骤902、906同样基于保持三相之间的120
°
的电相位偏移的条件,每个块跨越120
°
的机械角。在图5的示例中,其中电机500包括15个槽512和16个转子磁体506,可以看出,转子极间距满足第二计算906如下:
[0116][0117]
[0118][0119]
然后槽512的总数量可用于确定绕组布局908,这确保对于给定数量的槽和极,获得三相a、b和c之间的正确电偏移。在图5的情况下,包括15个槽412,所得构造要求每个基本块包括5个槽412,如绕组布局522所示。具有三个基本块n=3,并且使用图9a的方法确定的绕组布置910的另一示例由图9b示出。
[0120]
在上述布置中,实现了单层绕组布置。然而,本领域技术人员将理解,相同的概念可以扩展到双层绕组布置,其中定子的槽构造成接纳两个导体,如图6和7所示。
[0121]
图6和图7示出了可以如何用双层绕组构造实施本发明。在该示例中,电机600包括转子602和定子608。如前所述,转子602包括由围绕转子602的周缘分布的永磁体606的阵列围绕的旋转部件604。定子608包括磁性定子芯610和多个纵向槽612,这些纵向槽612在纵向轴线方向上延伸穿过定子芯610。定子608还包括用于三相(表示为a、b和c)中的每一相的多个集中绕组。对于每一相,绕组同样被分组,使得导体614围绕槽612缠绕以形成集中绕组的基本块616a
‑
b。仅示出了一个完整的块616a,然而,应当理解,如上所述,每一相可以包括集中绕组的一个或两个基本块。例如,机器600总共可以包括六个基本块。
[0122]
在该示例中,每个槽612构造成接纳两个导体614a
‑
b,两个导体614a
‑
b形成成组内层导体614a和成组外层导体614b。两个基本块之间的每个大齿包括用于接纳单个返回导体622的补充槽620,以便将内层导体614a连接到外层导体614b。在这方面,使内层导体614a、返回导体622和外层导体614b连接,使得电流沿着内层导体614a流动,经过返回导体622,然后沿着外层导体614b流动,电流流动在每个槽612内的相同方向上。
[0123]
在先前的示例中,位于相邻块的端部槽之间的大齿实际上是不活动的。在本示例中,包括返回导体622的附加槽620具有使大齿的该区域激活的作用,因为在导体622中流动的电流也有助于产生扭矩。然而,仍然将机械偏移角δ
ph
限定为相邻基本块616a、616b的端部槽之间的角度,并且用于确定槽和转子磁体数量的可行性的等式[1]
‑
[3]以与上述示例相同的方式应用。因此,槽的数量n
槽
不包括位于大齿区域中的附加槽620。同样,图8a和9a中所示的用于确定绕组布置的方法也以基本相同的方式应用于双层布置。
[0124]
在上述布置中,其中槽的数量n
槽
小于总转子极数2p,通过在基本块的端部槽之间提供大齿来实现所需的电偏移,取决于机器是单层还是双层绕组构造,这可能包括或可能不包括附加槽。这种布置的优点在于它在(n
槽
,2p)的可能组合方面提供了更大的灵活性。即,对于给定的槽数,有许多具有不同极数的解决方案,反之亦然。例如,具有n
槽
=36、2p=38、40、44、46等等的机器。尽管如前所述,槽的数量n
槽
越接近极数2p,机器性能越高。为了在扭矩密度(nm/kg)方面实现最佳性能,最优布置是对于n=3具有n
槽
=2p
‑
1,并且对于n=6具有n
槽
=2p
‑
2。
[0125]
上述所有布置都涉及具有三相的机器,然而,应当理解,本发明可以扩展到具有多于三相的相数量的机器。例如,六相机器可以包括六个基本块,即每一相一个块,每个块对应于60
°
机械角。替代地,六相机器可以包括十二个基本块,即每一相两个块,每个块对应于30
°
机械角。因此,虽然本文描述的布置涉及具有三个或六个基本块的机器,但是应当理解,本发明也可以扩展到包括基本块的数量n大于6的机器。.
[0126]
图10示出了包括如本文所述的电机1002的全电动或混合电动飞行器推进系统
1000的示例。电机1002包括根据上述布置的定子1006和转子1004。在这方面,定子1006具有集中绕组构造,其中对应于每一相的线圈布置成由大于转子极间距的机械偏移角隔开的基本块。电机1002借助旋转轴1010连接到飞行器推进器1008,其中电动机1002驱动轴1010从而驱动推进器1008。
[0127]
在全电动或混合电动飞行器的背景下,本文所述的电机可用于推进系统,其中电动马达通过将电力转换成机械功率(扭矩)来驱动飞行器的推进器,电力由涡轮轴驱动的发电机提供或由电池提供。
[0128]
可以对所有上述实施例进行各种修改,无论是通过添加、删除和/或替换的方式,以提供其它实施例,它们中的任一个和/或全部旨在由所附权利要求书涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。