1.本发明涉及一种用于测量连接到漂浮物体的系泊缆绳的缆绳角度的方法。此外,本发明涉及一种用于测量连接到漂浮物体的系泊缆绳的缆绳角度的系统。
背景技术:
2.在海上工业中存在的全世界的趋势为最小化潜水员的干预,以降低这种操作的相关风险。同时,在自动控制系统中的进展已经允许在困难的环境中部署精密的潜水器。
3.对于诸如通过系泊缆绳系泊在海上的浮标之类的漂浮物体,需要定期检修漂浮物体的浸没部分以检查系泊缆绳的状态并避免其意外失效。系泊缆绳包括由合成材料(例如尼龙和聚酯和/或钢丝或其组合)制成的缆绳。同样,系泊缆绳可以包含由钢链节构成的系泊链,或者可以包括这种系泊链的至少一段。
4.在终端的定期检修期间需要执行的一个措施是由具有非常接近浮标的竖直方向的系泊缆绳及其系泊缆绳连接器形成缆绳角度。
5.特别是对于基于悬链锚腿的系泊,即对于calm终端,其中浮标以相当大的运动幅度和速度响应于甚至中浪的状况,通过潜水员或遥控设备(rov)接近浮标可能是困难的。例如,大约一米的波高可以引起终端的几米的运动偏移。
6.本发明的一个目的是提供一种在没有潜水员或rov并且没有直接接近浮标的情况下,具有足够精度的用于测量浮标附近的系泊缆绳的缆绳角度,从而避免了与浮标的大运动相关的碰撞风险的方法。
技术实现要素:
7.该目的通过一种用于测量连接到漂浮物体的至少一条系泊缆绳的缆绳角度的方法来实现,漂浮物体漂浮在水体中,系泊缆绳连接在漂浮物体和设置在水体的水底上的锚定主体之间,其中漂浮物体通过缆绳连接器联接到系泊缆绳;该方法包括:
8.定义至少三个数据点,每个数据点与系泊缆绳上的相应位置相关联;在至少三个数据点上获得与系泊缆绳上的位置相关联的相应值;根据所获得的针对至少三个数据点的与系泊缆绳上的位置相关联的值来确定描述锚缆绳曲线的等式的参数;根据基于所确定的参数在预定位置处的锚缆绳曲线的等式的导数,在锚缆绳上的预定位置处计算锚缆绳的缆绳角度,其中方法还包括:
9.提供包括至少三个传感器的一组传感器,传感器中的每个配置为用于测量与系泊缆绳相关联的相应值;
10.在至少三个数据点中的每个上,将相关联的传感器安装在来自一组传感器的系泊缆绳上,传感器中的每个配置为用于测量与系泊缆绳相关联的相应值并用于传输测量值的信号,其中,至少第二传感器和第三传感器通过遥控水下潜水器rov安装在系泊缆绳上的预定位置上,并且获得至少三个数据点上的值的步骤包括从每个相关联的传感器接收相应测量值的信号,并且针对每个接收的信号,将测量值与数据点在系泊缆绳上的位置相关联。
11.该方法允许从至少三个点的位置或在第一和第二点的位置加上在第三点的锚缆绳曲线的局部缆绳角度测量锚缆绳曲线,并且确定缆绳角度,而不需要通过潜水员或rov在邻近浮标的水下区域中执行测量。
12.本发明还涉及一种根据权利要求14的用于测量连接到漂浮物体的系泊缆绳的缆绳角度的系统。此外,本发明涉及一种具有用于测量连接到漂浮物体的系泊缆绳的缆绳角度的系统的漂浮物体。
附图说明
13.在下文中将仅通过示例的方式参考附图来描述本发明的实施例,附图在本质上是示意性的,因此不必按比例绘制。在附图中,相同或类似的元件由相同的附图标记表示。
14.图1示意性地示出了展示本发明的实施例的系泊在水体中的漂浮物体;
15.图2更详细地示意性地示出了图1的一部分,以及
16.图3示出了根据本发明的实施例的方法的流程图。
具体实施方式
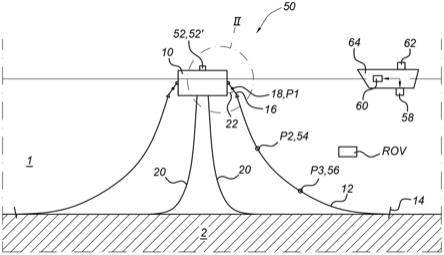
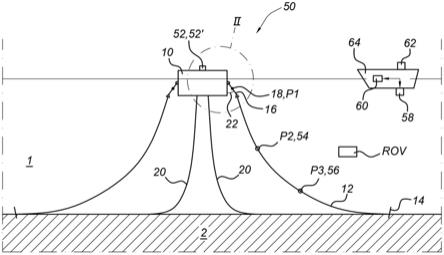
17.图1示意性地示出了展示本发明的实施例的系泊在水体中的漂浮物体。
18.在诸如海或湖的水体1中、漂浮物体10通过系泊缆绳12系泊到锚定主体14。每个锚定主体14设置在海床2或湖床2上或海床2或湖床2中。
19.每个系泊缆绳12通过缆绳连接器16连接到漂浮物体10,缆绳连接器16包括铰接件18,以允许系泊缆绳和竖直方向之间的缆绳角度22(即系泊缆绳角度)根据施加在漂浮物体上的力(例如低潮、高潮、水流和风暴)而变化。
20.此外,用于输送碳氢化合物液体和/或气体的一些立管20可以在海床2上的井口(未示出)和漂浮物体10之间运转。
21.为了能够测量缆绳角度,提供了用于根据在漂浮物体10和锚定主体14之间的系泊缆绳12的形状来确定在铰接件18处的缆绳角度22的系统50。这里,这种形状被称为锚缆绳曲线。
22.为了确定锚缆绳曲线形状,考虑测量锚缆绳曲线上的至少三个点p1、p2、p3的地理定位(以下称为:地理位置),或者测量两个点p1、p2的地理位置加上测量锚缆绳曲线上的第三点p3处的局部测量的缆绳角度。使用这些至少一个3点p1、p2、p3的相应的三个地理位置(或两个地理位置加上局部缆绳角度),执行曲线拟合过程以获得描述作为地理位置的函数的锚缆绳曲线的一组参数。根据该组参数,可以计算在铰接件18的地理位置处的锚缆绳曲线的导数,该位置是系泊缆绳上的预定位置。根据在铰接件18的地理位置处的锚缆绳曲线的导数,然后建立铰接件与竖直方向处的缆绳角度22。
23.在测量两个点的地理位置加上测量在第三点处的局部测量的缆绳角度的情况下,可以在与第二点的地理位置相同的位置处测量在第三点处的局部测量的缆绳角度。在这种情况下,第二点和第三点的位置可以重合。
24.该系统包括将安装在待测量的系泊缆绳上的至少第一位置传感器52、第二位置传感器54和第三位置传感器56。
25.此外,该系统包括用于从每个位置传感器52、54、56接收相应的位置信号的第一设
备58和用于根据每个所接收的位置信号确定相应的位置传感器的位置的第二设备60,系泊缆绳上的点的位置与相应的位置传感器相关联。
26.在实施例中,至少第一位置传感器52、第二位置传感器54和第三位置传感器56中的每个都是应答器,该应答器配置为发送与其各自位置相关的信号。第一设备58是收发器,其配置为向位置传感器发送信号以启动传输来自应答器的位置相关信号,并从应答器接收位置相关信号。
27.根据应答器或传感器类型,位置相关信号可以包括绝对位置或相对位置的数据。绝对位置可以包括地理坐标。相对位置可以包括与第一设备58的位置相对的位置。
28.在另一实施例中,第一位置传感器52是基于配置为产生第一位置传感器地理位置坐标的第一gps传感器。第一gps传感器安装在漂浮物体10上。使用来自第一gps传感器52的第一位置传感器地理位置坐标,确定缆绳连接器16的铰接件18的中心的位置作为第一点p1的地理位置。下面将参考图2更详细地解释这一点。第一gps传感器52的信号由适当的接收器(未示出)接收并作为漂浮物体10的地理位置传送到第二设备60。
29.在优选实施例中,第一位置传感器52是第一gps传感器,而第二位置传感器54和第三位置传感器56是分别安装在第二点和第三点的位置处的usbl(超短基线)应答器。
30.根据本发明的方法,使用遥控水下潜水器(rov)将它们安装在系泊缆绳上。有利地,rov的使用允许无潜水地部署水下位置传感器54、56。
31.usbl收发器58从usbl应答器54、56的读数获得第二点和第三点的位置。通常,收发器58和第二设备60部署在支撑船64上,该支撑船64位于离漂浮物体一定距离的位置。
32.在usbl收发器58与第二gps传感器62相关联的情况下,第二点和第三点的位置可以通过与usbl收发器58相关联的第二gps传感器62的gps坐标来参考第二点和第三点p2、p3的绝对位置(地理位置)。第二gps传感器62通常靠近支撑船64上的usbl收发器58。以此方式,usbl收发器的位置可以由与usbl收发器相关联的第二gps传感器根据gps位置确定。
33.第二设备60是能够执行第一计算过程的计算设备,所述第一计算过程用于确定描述穿过如上所述获得的至少三个点p1、p2、p3的相应位置的锚缆绳曲线的等式的参数值,并且第二设备60可以基于任何合适的数值曲线拟合方法。
34.或者,第一计算过程可以包括确定描述穿过两个点p1、p2的相应位置的锚缆绳曲线的等式的参数值,加上考虑在第三点p3(该第三点可以与第二点重合)处局部测量的缆绳角度。
35.另外,第二设备60能够执行第二计算过程,用于基于所确定的参数值根据锚缆绳曲线的等式的导数计算在锚缆绳上的预定位置处与竖直方向的缆绳角度22。
36.将参考图3更详细地描述第一和第二计算过程的实施例。
37.本领域的技术人员将会理解,第二设备60可以是被布置用于执行计算过程的单个计算设备、或者布置在网络中的多个计算设备。第二设备60连接到第一设备58,用于通过有线或无线网络(未示出)进行数据通信,并且第二设备60可以位于与第一设备58相同的位置,但是也可以位于不同的位置。
38.根据本发明,通过使用涉及在缆绳连接器16的铰接件18的位置处的锚缆绳曲线的导数的计算,根据描述锚缆绳曲线形状的参数确定铰接件处的缆绳角度22。
39.图2更详细地示意性地示出了图1的部分。
40.在漂浮物体10上的第一位置传感器52是如上所述的第一gps传感器的情况下,将缆绳连接器16的铰接件18的中心作为第一点的地理位置。然后,根据漂浮物体10上的第一gps传感器的地理位置计算第一点的地理位置,并对漂浮物体上的第一gps传感器的位置l2与铰接件18的中心的位置l1之间的距离进行校正。可以根据漂浮物体构造的实际布局和在漂浮物体10处的缆绳连接器16的铰接件18的中心位置来确定校正,校正与铰接件18的中心与漂浮物体10上的第一gps传感器52的实际位置(即,位置l2与位置l1之间)之间的表示为x的距离向量(由虚线指示)对应。
41.在实施例中,校正由第二设备60执行。
42.图3示出了根据本发明的实施例的方法的流程图。
43.根据本发明的实施例,提供了一种用于执行过程300以确定由系泊缆绳12系泊的漂浮物体10的缆绳角度值22的方法。
44.在第一步骤310中,该方法包括将第一gps传感器作为第一传感器安装在漂浮物体上,并且至少将第二传感器和第三传感器安装在系泊缆绳上。该步骤还包括部署测量装置64,该测量装置64包括至少与漂浮物体和系泊缆绳相距一定距离的第一设备58。第二设备60可以位于第一设备58附近的测量装置64处,但也可以位于不同的位置。
45.在随后的步骤320中,该方法包括由第一计算设备58接收来自第一位置传感器以及第二传感器和第三传感器中的至少一个的位置相关信号的步骤。
46.另外,第一位置传感器可以配备有姿势传感器,以测量与位置信号相结合的局部姿势或局部缆绳角度相关信号。
47.在可选实施例中,从第二位置传感器接收位置相关信号,并且从第三传感器接收局部缆绳角度相关信号。
48.在下一步骤中,第二设备60布置为执行过程330以确定第一位置传感器和至少第二传感器和第三传感器中的每个在系泊缆绳12上的位置。所确定的位置可以是相对位置(相对于测量装置的位置具有的相对位置),或者可以是绝对位置(例如定义为地理位置)。
49.在随后的步骤中,第二计算设备60布置为执行过程340,以根据第一位置传感器的位置和距离向量x来确定在缆绳连接器16的铰接件18的中心处的第一点的位置。
50.在下一步骤中,第二设备60布置为执行过程350以确定参数值,该参数值将锚缆绳曲线形状描述为系泊缆绳12上的至少三个点的位置(或系泊缆绳上的两个点的位置加上系泊缆绳上的一个点处的局部缆绳角度)的函数。过程350可以使用曲线拟合方法来获得参数值。
51.在进一步的步骤中,第二设备60布置为执行过程360,以通过计算在缆绳连接器16的铰接件18的中心的位置处的局部导数来确定在缆绳连接器16的铰接件18的中心的位置处的缆绳角度值。
52.或者,可以通过重复如上所述的过程步骤320
‑
360,随时间反复确定缆绳角度值以获得缆绳角度值的时间平均值(和/或曲线拟合参数的值、至少三个点的位置和/或至少三个位置传感器的位置中的任一个)。
53.在另一实施例中,该方法包括在步骤380中将缆绳角度、和/或曲线拟合参数、和/或至少三个点的位置、和/或至少三个位置传感器的位置的实时值或时间平均值存储在计算机可读介质中。
54.这种方法可以包括在计算机可读介质中至少存储计算出的与竖直方向或水平方向的缆绳角度的值、和/或在计算机可读介质中存储用于系泊缆绳上的至少三个数据点的测量位置的值、和/或在计算机可读介质中存储来自至少三个位置传感器的测量位置信号的值、和/或存储根据与针对至少三个数据点在系泊缆绳上的位置相关联的测量值描述锚缆绳曲线的等式的所确定参数的值。
55.所存储的数据值可用于例如在线或离线分析,但也可涉及当船只(未示出)系泊在漂浮物体10处用以从立管20卸载液体或气态烃时的过程监控或过程控制。
56.在实施例中,系泊浮标部署在大约2000m或更浅的水深中使用。
57.图4示意性地示出了展示本发明的实施例的系泊在水体中的漂浮物体。
58.在图4中,具有与图1
‑
3中所示的相同附图标记的实体表示相应的实体。
59.根据本发明的实施例,提供了一种用于测量链角的方法,该方法包括间接地测量至少一个系泊链的顶角,该系泊链经由附接到无人表面潜水器70的3d测深系统71连接到漂浮物体10。顶角通过悬链绳与测深反射点的拟合以及3d表面拟合来确定。
60.该方法包括:
61.i.利用无人表面潜水器70(完全远程操纵的勘测潜水器)围绕漂浮物体导航,同时获取表示在漂浮终端下方的海底布局绘图的3d点云。
62.附接到无人表面潜水器70的3d测深系统71向海床发射声波,并且每次声波碰到海底结构时,声波反射回测深系统。声波从海床2上的结构反弹并返回3d测深系统(的接收器)所花费的时间量被用于确定每个反射点的精确坐标和深度,从而产生漂浮物体下方的所有水下结构的精确场布局绘图。
63.ii.针对一个或多个系泊缆绳12通过在表示悬链绳的反射点之间内插最佳拟合的3d表面(例如,通过使用非线性最小二乘回归分析对悬链绳等式进行参数化),使用高级数据分析工具对各个3d点云进行后处理,同时使用公知的统计工具计算最佳置信度、预测和校准间隔。
64.iii.利用(预定的)足够的精度和准确度,根据在预定位置的锚缆绳曲线的等式的导数计算每个测量的锚缆绳的顶部倾斜(顶部角度)值。
65.前面的描述详细描述了本发明的某些实施例。然而,应当理解,无论前面的详细描述如何在文本中出现,本发明可以以各种方式实施。
66.虽然上面的详细描述已经示出、描述和指出了应用于各种实施例的本发明的新颖特征,但是应当理解,在不脱离本发明的精神的情况下,本领域技术人员可以对所示的系统或方法的形式和细节进行各种修改。本发明的范围由所附权利要求书而不是前面的描述来指示。在权利要求的等同物的含义和范围内的所有修改都包含在它们的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。