1.本实用新型涉及农业机械领域,具体涉及一种用于瓜类蔬菜种植的自动化耕具。
背景技术:
2.蔬菜种类丰富多样,按照农业生物学分类法有瓜类、茄果类、叶菜类、块茎类、真根类、葱蒜类、豆荚类、多年生菜类、水生菜类、菌类和其他类。不同种类的蔬菜其根系深浅、吸肥特点、适宜栽培的土壤各不相同,需要精细整地,合理密植。随着现代农业的发展,耕作工具也出现多样化,所以蔬菜类耕作工具,已经不能停留在过去的一种或几种的犁耙,耕作工具必须要适合不同的耕深、耕宽各种蔬菜种类的要求。
3.从文献中检索到,耕作机中,开沟器或犁铧的入土角度影响工作效率、能量消耗以及犁铧的寿命。中国专利:《一种大小可调的农作物种植用多角度移动式开沟器》(申请号:201810680390x)用齿轮带动开沟板的底板转动,从而改变了开沟板入土的角度。而《播种机的智能开沟器》(申请号:2018107940321)以及《一种开沟器》(申请号:2018107958630)则在开沟器上沿设置了一个旋转轴和电机,旋转轴连接开沟器与播种机,通过电机带动该旋转轴转动,改变了开沟器下沿与地面间的夹角。这两个方案都把动作机构设置在开沟器上,而开沟器体积较小,安装有所不便,况且开沟器工作时又接触土壤,增加了故障的发生机率。
4.农田耕作中调整犁铧的入土深度的基本措施是采用螺丝或螺孔钳位来改变开沟器的安装高度,例如:《一种悬挂式旱地开沟器》(申请号:2018114754286)、《一种苔麸施肥播种机及其开放式开沟器》(申请号:20183322590)。利用手动丝杆伸缩式地改变开沟器的高度,例如《设施蔬菜种植开沟机》(申请号:2018109867301)。类似的有采用手轮旋动丝杠在限位滑道里移动来调节开沟器的高度,例如《一种旋耕施肥播种机的开沟器总成》(申请号:2018210208118)。电动调节耕深是必由之路。例如《一种可以调节开沟深度的蔬菜种植用开沟设备》(申请号:2018106919060)置动作机构于一室,利用气缸带动旋转板转动,旋转板的转动再转换为直线运动,从而调整开沟设备的高度。而《开沟器设备桩》(申请号:2018108096706)则通过蜗杆带动伸缩杆伸缩,改变开沟器的上、下沿之间的夹角或活动挡板与开沟器下沿侧壁间的夹角,从而调整耕宽与耕深;该方案把耕深、耕宽调节机构设置在开沟器的下部,接近或进入了土壤,同样存在发生故障的机率问题。
技术实现要素:
5.针对上述情况,本实用新型提供一种用于瓜类蔬菜通用种植的自动化耕具,它采用电脑管理,安排了一个超声波传感器监测犁的高度,安排一个十字型倾角传感器监测犁柱的倾角,进而计算出犁铧的入土角度;与此同时,电脑操作第一套直线轴位移装置使得犁在竖直方向运动,实现自动调整耕深,操作第二套直线轴位移装置拉动犁绕着犁的安装点转动,从而改变犁的入土角度;入土角度与耕深调整机构远离土壤,结构简洁,自动化程度高。
6.本实用新型解决其技术问题所采用的技术方案是:它采用微型计算机作为控制系
统,其操作机构包括一辆长方形四轮车、犁、第一套直线轴位移装置、第二套直线轴位移装置、第一金属杆、第一金属板、第二金属板、一台计算机、两块max232、一块74hc164、一块74hc165、一块74hc273、一块74hc30以及 5v电源、一个超声波传感器及其模块、超声波传感器模块至pc的usb接口板、倾角传感器;其中,计算机的rs232c接口的两根输出联络线以及串行数据输出线分别经过电平转换电路max232以后变换成ttl电平信号rts、dtr与txd,rts、dtr与txd分别连接有一个下拉电阻,rts同时连接到74hc164与74hc165的时钟端,dtr同时连接到74hc164的第一个串行信号输入端以及74hc165的shift/load端,txd连接到74hc273的时钟端,74hc164的第二个串行信号输入端及其清零端、74hc273与74hc165的清零端都连接到 5v电源的正极,74hc164的八个信号输出端与74hc273的八个信号输入端一一连接,74hc273的八个信号输出端分别连接有一个下拉电阻,74hc273的信号输出端1q、2q分别连接到第一套直线轴位移装置的步进电机驱动电路的正转控制线与反转控制线,74hc273的信号输出端3q、4q分别连接到第二套直线轴位移装置的步进电机驱动电路的正转控制线与反转控制线;第一套直线轴位移装置中的两个微动开关的一端、第二套直线轴位移装置中的两个微动开关的一端与与非门74hc30的四个输入端一一连接,还与74hc165的四个并行输入端一一连接,这四个微动开关的另一端都连接到 5v电源的负极,74hc30空余的四个输入端都连接到 5v电源的正极,74hc165的八个并行输入端分别连接有一个上拉电阻,74hc165的串行数据输入端ser以及片选端inh都连接到 5v电源的负极,74hc30的输出端与74hc165的串行数据输出端经过电平转换电路max232以后分别连接到计算机的rs232c接口的输入联络线cd与cts;犁由犁铧、左犁侧板、右犁侧板、犁托、犁柱组成;第一套直线轴位移装置通过其金属底板用销钉安置在长方形四轮车的上长方形金属框的纵向金属板上;第一金属板的上端与第一套直线轴位移装置的滑台的下端沿竖直方向固定地连接;第二套直线轴位移装置通过其金属底板用销钉斜向地安置在第一套直线轴位移装置的滑台上;第一金属杆的上端与第二套直线轴位移装置的滑台的下端沿第二套直线轴位移装置的滑台移动的方向固定地连接;第一金属杆的下端与第二金属板的上端固定连接,第二金属板的下端与犁的犁柱固定连接,第二金属板的下端与犁的犁柱一起通过转轴连接到第一金属板的下端;超声波传感器及其模块面朝下安置在长方形四轮车的横向金属板上,超声波传感器及其模块通过一块超声波传感器模块至pc的usb接口板连接到计算机的一个usb接口;倾角传感器安置在犁柱上,倾角传感器的轴线与犁柱的轴线平行,倾角传感器的输出信号线通过计算机的第二个rs232c接口连接到计算机。
7.所述长方形四轮车由上长方形金属框、下长方形金属框、四根长度相等的金属杆、纵向金属板、四个车轮以及横向金属板组成,上长方形金属框与下长方形金属框的长、宽尺寸相同,分别由两长两短的金属杆构成,上长方形金属框、下长方形金属框以及四根长度相等的金属杆组成空心六面立方体,四个车轮安装在下长方形金属框的下面,纵向金属板的两端分别安置在上长方形金属框的两个短边的中点,横向金属板位于纵向金属板的右边,横向金属板的两端分别安置在上长方形金属框的两个长边上,接近上长方形金属框的右端。
8.所述一套直线轴位移装置包括一块金属底板、前金属板、后金属板、两根光轴、一根滚珠丝杆、两个法兰直线轴承、三个直线轴承、三个螺母座、滑台、联轴器、步进电机、步进电机架、步进电机驱动电路以及两个微动开关;其中,金属底板的面位于水平方向,前金属
板、后金属板都竖立地安置在金属底板上,前金属板靠近金属底板的左端,后金属板位于金属底板的中央,金属底板上开设有销钉孔;前金属板、后金属板上各自等间距地开设有左、中、右三个圆孔,第一根光轴穿过第一个直线轴承,它的两端分别安装在前金属板、后金属板的左圆孔上,通过这两个左圆孔上的螺丝固定,第一个直线轴承上配合有第一个螺母座;第二根光轴穿过第二个直线轴承,它的两端分别安装在前金属板、后金属板的右圆孔上,通过这两个右圆孔上的螺丝固定,第二个直线轴承配合有第二个螺母座;前金属板上中间的圆孔通过螺丝安装第一个法兰直线轴承,后金属板上中间的圆孔通过螺丝安装第二个法兰直线轴承;滚珠丝杆穿过第三个直线轴承,第三个直线轴承配合有第三个螺母座,该滚珠丝杆的一端安置在前金属板上的第一个法兰直线轴承中,它的另一端穿过后金属板上的第二个法兰直线轴承,然后连接到联轴器的一端,该联轴器的另一端连接到步进电机的轴,该步进电机通过步进电机架安置到金属底板上,并受步进电机驱动电路的电信号控制;滑台是一个金属板,该滑台上面开设有销钉孔,通过螺丝同时固定在第一个、第二个、第三个螺母座上;第一个微动开关安置在前金属板上靠近第一个法兰直线轴承的地方,面朝滑台,当滚珠丝杆上直线轴承所承载的滑台移近第一个法兰直线轴承时能受到滑台的触碰;第二个微动开关安置在后金属板上靠近第二个法兰直线轴承的地方,面朝滑台,当滚珠丝杆上直线轴承所承载的滑台移近第二个法兰直线轴承时能受到滑台的触碰。
9.投入工作前先进行一次超声波传感器、倾角传感器的校准。
10.工作时,先运行“监测、调整入土角度与深度程序”,预置犁铧的入土角度、入土深度的数据,电脑就会操作第一套直线轴位移装置上的步进电机正转与反转,从而改变犁的高度亦即耕深,然后,电脑将操作第二套直线轴位移装置上的步进电机正转与反转,使得第二套直线轴位移装置所属滑台所连接的第一金属杆斜方向上下位移,带动第二金属板以及它连接的犁绕着位于第一金属板下端的转轴转动,从而改变了犁相对于土壤面的角度。工作过程中,电脑适时获取超声波传感器的数据以及倾角传感器的数据,并计算出犁的入土角度与入土深度,对照预置的参数及时操作第一套直线轴位移装置、第二套直线轴位移装置动作,自动调整犁铧的入土角度与耕深。当直线轴位移装置的滑台位移到滚珠丝杆的两个极端位置时,第一套直线轴位移装置的两个微动开关与第二套直线轴位移装置上的两个微动开关会向电脑发出停止相关电机转动的信号。
11.本实用新型的有益效果是:既能监测犁的高度又能监测犁铧的入土角度,根据预置的参数既能自动调整犁铧的入土角度又能自动调整犁铧的入土深度,动作机构远离土壤,避免了因工作时土壤沾染造成的故障;自动化程度高。
12.附图说明:
13.下面结合附图进一步说明本实用新型的实施结构;
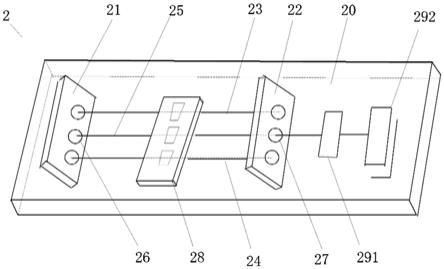
14.图1表示一套直线轴位移装置的结构,
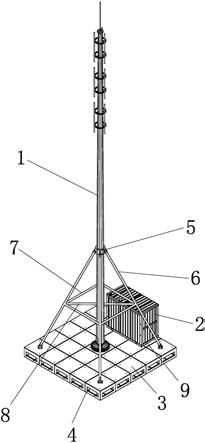
15.图2为本实用新型的整体结构示意图,
16.图3是计算机rs232c接口转换成ttl逻辑电平信号的电路图,
17.图4是计算机rs232c接口的rts、dtr以及txd信号控制两个步进电机的电路图,
18.图5是四个微动开关产生中断响应信号的电路图,
19.图6是计算机rs232c接口的cts检测四个微动开关状态的电路图;
20.图1中,2. 一套直线轴位移装置,20. 金属底板,21. 前金属板,22. 后金属板,
23. 第一根光轴,24. 第二根光轴,25 滚珠丝杆,26. 第一个法兰直线轴承,27. 第二个法兰直线轴承,28. 滑台,291. 联轴器,292. 步进电机;
21.图2 中,涉及长方形四轮车的部件有:31. 上长方形金属框,32. 下长方形金属框,33. 金属杆,34. 车轮,35. 纵向金属板,36. 横向金属板;
22.涉及第一套直线轴位移装置的部件有:40. 第一金属底板,41. 第一前金属板,42. 第一后金属板,48. 第一滑台,492. 第一步进电机;
23.涉及第二套直线轴位移装置的部件有:50.第二金属底板,51. 第二前金属板,52. 第二后金属板,58. 第二滑台,592. 第二步进电机;
24.37. 超声波传感器及其模块,6. 第一金属板,7. 第一金属杆,8. 第二金属板,69. 第二金属板的下端与犁的犁柱一起转动的转轴,9. 犁,91. 倾角传感器。
具体实施方式
25.第一套直线轴位移装置与第二套直线轴位移装置的结构相同。如图1所示,一套直线轴位移装置2包括一块金属底板20、前金属板21、后金属板22、第一根光轴23、第二根光轴24、一根滚珠丝杆25、第一个法兰直线轴承26、第二个法兰直线轴承27、三个直线轴承、三个螺母座、滑台28、步进电机驱动电路291、步进电机292、步进电机架以及两个微动开关。
26.图2示意了本实用新型的整体结构。其中,长方形四轮车由上长方形金属框31、下长方形金属框32、四根长度相等的金属杆33、纵向金属板35、四个车轮34以及横向金属板36组成。超声波传感器及其模块37安置在该横向金属板36上。第一套直线轴位移装置通过其第一金属底板40用销钉安置在长方形四轮车的纵向金属板35上;第一金属板6的上端与第一套直线轴位移装置的第一滑台48的下端沿竖直方向固定地连接;第二套直线轴位移装置通过其第二金属底板50用销钉斜向地安置在第一套直线轴位移装置的第一滑台48上;第一金属杆7的上端与第二套直线轴位移装置的第二滑台58的下端沿第二套直线轴位移装置的第二滑台58移动的方向固定地连接;第一金属杆7的下端与第二块金属板8的上端固定连接,第二金属板8的下端与犁9的犁柱固定连接,第二金属板8的下端与犁9的犁柱一起通过转轴69连接到第一金属板6的下端。
27.每一个步进电机的正转或反转由一组步进电机驱动电路来控制、驱动。计算机rs232c接口与两组步进电机驱动电路、四个微动开关之间的接口电路如图3、图4、图5、图6所示。其中,图3所示max232承担电平转换任务。图4给出了计算机rs232c接口的rts、dtr以及txd信号联合控制第一组步进电机驱动电路、第二组步进电机驱动电路的电路图。为避免步进电机空转而设置的两组微动开关通过图5所示8输入与非门74hc30来产生中断信号给计算机,而计算机会如图6所示及时通过rs232c接口的cts检测四个微动开关的状态。图4、图5、图6所示电路需要配合相应的计算机程序来实施。
28.超声波传感器及其模块37通过一块超声波传感器模块至pc的usb接口板连接到计算机的一个usb接口。所述超声波传感器、超声波传感器模块至pc的usb接口板以及倾角传感器可以根据经济情况选购。例如型号为hg
‑
c40u的超声波测距传感器&模块(uart),与其配套的pc接口板型号为hib
‑
a
‑
01;无锡迈科传感科技有限公司销售型号为lvt416t的数字输出型单轴倾角传感器。
29.本实用新型具体工作过程如下:
30.设计一种用于不同瓜类蔬菜通用种植的自动化耕具:它采用微型计算机作为控制系统,其操作机构安排了一个超声波传感器监测犁的高度,安排一个十字型倾角传感器监测犁柱的倾角,进而计算出犁铧的入土角度;例如当作为西红柿或叶子菜的土地耕作时,入土角度与耕深需要较小较浅,电脑操作第一套直线轴位移装置使得犁在水平方向运动,实现自动调整浅耕,操作第二套直线轴位移装置拉动犁绕着犁的安装点转动,从而改变犁的入土角度;入土角度与耕深调整机构远离土壤;行距为10
‑
15厘米,深度为15
‑
20厘米,当作为红薯或马铃薯的薯类土地耕作时,入土角度与耕深需要较小较深,电脑操作第一套直线轴位移装置使得犁在竖直方向运动,实现自动调整深耕,从而改变犁的入土角度;入土角度与耕深调整机构进入深土壤。行距为15
‑
20厘米,深度为20
‑
25厘米。
31.上述说明并非是对本技术的限制,本技术也并不限于上述实例,本技术领域的普通技术人员,在本技术的实质范围内,作出的变化、改型、添加或替换,都应属于本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。