技术特征:
1.一种用于瓜类蔬菜种植的自动化耕具,它采用微型计算机作为控制系统,其中,犁由犁铧、左犁侧板、右犁侧板、犁托、犁柱、犁壁组成,其特征是:它包括一辆长方形四轮车、犁(9)、第一套直线轴位移装置、第二套直线轴位移装置、第一金属杆(7)、第一金属板(6)、第二金属板(8)、一台计算机、两块max232、一块74hc164、一块74hc165、一块74hc273、一块74hc30以及 5v电源、一个超声波传感器及其模块(37)、超声波传感器模块至pc的usb接口板、倾角传感器(91);其中,计算机的rs232c接口的两根输出联络线以及串行数据输出线分别经过电平转换电路max232以后变换成ttl电平信号rts、dtr与txd,rts、dtr与txd分别连接有一个下拉电阻,rts同时连接到74hc164与74hc165的时钟端,dtr同时连接到74hc164的第一个串行信号输入端以及74hc165的shift/load端,txd连接到74hc273的时钟端,74hc164的第二个串行信号输入端及其清零端、74hc273与74hc165的清零端都连接到 5v电源的正极,74hc164的八个信号输出端与74hc273的八个信号输入端一一连接,74hc273的八个信号输出端分别连接有一个下拉电阻,74hc273的信号输出端1q、2q分别连接到第一套直线轴位移装置的步进电机驱动电路的正转控制线与反转控制线,74hc273的信号输出端3q、4q分别连接到第二套直线轴位移装置的步进电机驱动电路的正转控制线与反转控制线;第一套直线轴位移装置中的两个微动开关的一端、第二套直线轴位移装置中的两个微动开关的一端与与非门74hc30的四个输入端一一连接,还与74hc165的四个并行输入端一一连接,这四个微动开关的另一端都连接到 5v电源的负极,74hc30空余的四个输入端都连接到 5v电源的正极,74hc165的八个并行输入端分别连接有一个上拉电阻,74hc165的串行数据输入端ser以及片选端inh都连接到 5v电源的负极,74hc30的输出端与74hc165的串行数据输出端经过电平转换电路max232以后分别连接到计算机的rs232c接口的输入联络线cd与cts;第一套直线轴位移装置通过其第一金属底板(40)用销钉安置在长方形四轮车的纵向金属板(35)上;第一金属板(6)的上端与第一套直线轴位移装置的第一滑台(48)的下端沿竖直方向固定地连接;第二套直线轴位移装置通过其第二金属底板(50)用销钉斜向地安置在第一套直线轴位移装置的第一滑台(48)上;第一金属杆(7)的上端与第二套直线轴位移装置的第二滑台(58)的下端沿第二套直线轴位移装置的第二滑台(58)移动的方向固定地连接;第一金属杆(7)的下端与第二金属板(8)的上端固定连接,第二金属板(8)的下端与犁(9)的犁柱固定连接,第二金属板(8)的下端与犁(9)的犁柱一起通过转轴(69)连接到第一金属板(6)的下端;超声波传感器及其模块(37)面朝下安置在长方形四轮车的横向金属板(36)上,超声波传感器及其模块(37)通过一块超声波传感器模块至pc的usb接口板连接到计算机的一个usb接口;倾角传感器(91)安置在犁柱上,倾角传感器(91)的轴线与犁柱的轴线平行,倾角传感器(91)的输出信号线通过计算机的第二个rs232c接口连接到计算机。2.根据权利要求1所述的用于瓜类蔬菜种植的自动化耕具,其特征是:所述长方形四轮车由上长方形金属框(31)、下长方形金属框(32)、四根长度相等的金属杆(33)、纵向金属板(35)、四个车轮(34)以及横向金属板(36)组成,上长方形金属框(31)与下长方形金属框(32)的长、宽尺寸相同,分别由两长两短的金属杆构成,上长方形金属框(31)、下长方形金属框(32)以及四根长度相等的金属杆(33)组成空心六面立方体,四个车轮(34)安装在下长方形金属框(32)的下面,纵向金属板(35)的两端分别安置在上长方形金属框(31)的两个短边的中点,横向金属板(36)位于纵向金属板(35)的右边,横向金属板(36)的两端分别安置在上长方形金属框(31)的两个长边上,接近上长方形金属框(31)的右端。
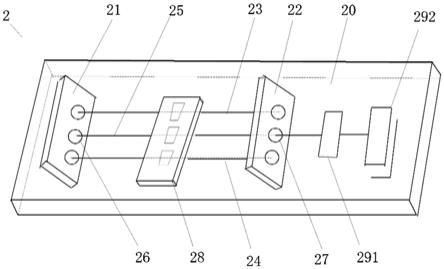
3.根据权利要求1所述的用于瓜类蔬菜种植的自动化耕具,其特征是:所述一套直线轴位移装置(2)包括前一块金属底板(20)、前金属板(21)、后金属板(22)、第一根光轴(23)、第二根光轴(24)、一根滚珠丝杆(25)、第一个法兰直线轴承(26)、第二个法兰直线轴承(27)、三个直线轴承、三个螺母座、滑台(28)、联轴器(291)、步进电机(292)、步进电机架、步进电机驱动电路以及两个微动开关;其中,金属底板(20)的面位于水平方向,前金属板(21)、后金属板(22)都竖立地安置在金属底板(20)上,前金属板(21)靠近金属底板(20)的前端,后金属板(22)位于金属底板(20)的中央,金属底板(20)上开设有销钉孔;前金属板(21)、后金属板(22)上各自等间距地开设有左、中、右三个圆孔,第一根光轴(23)穿过第一个直线轴承,它的两端分别安装在前金属板(21)、后金属板(22)的左圆孔上,通过这两个左圆孔上的螺丝固定,第一个直线轴承上配合有第一个螺母座;第二根光轴(24)穿过第二个直线轴承,它的两端分别安装在前金属板(21)、后金属板(22)的右圆孔上,通过这两个右圆孔上的螺丝固定,第二个直线轴承配合有第二个螺母座;前金属板(21)上中间的圆孔通过螺丝安装第一个法兰直线轴承(26),后金属板(22)上中间的圆孔通过螺丝安装第二个法兰直线轴承(27);滚珠丝杆(25)穿过第三个直线轴承,第三个直线轴承配合有第三个螺母座,该滚珠丝杆(25)的一端安置在前金属板上(21)的第一个法兰直线轴承(26)中,它的另一端穿过后金属板(22)上的第二个法兰直线轴承(27),然后连接到联轴器(291)的一端,该联轴器(291)的另一端连接到步进电机(292)的轴,该步进电机(292)通过步进电机架安置到金属底板(20)上,并受步进电机驱动电路的电信号控制;滑台(28)是一个金属板,该滑台(28)上面开设有销钉孔,通过螺丝同时固定在第一个、第二个、第三个螺母座上;第一个微动开关安置在前金属板(21)上靠近第一个法兰直线轴承(26)的地方,面朝滑台(28),当滚珠丝杆(25)上直线轴承所承载的滑台(28)移近第一个法兰直线轴承(26)时能受到滑台(28)的触碰;第二个微动开关安置在后金属板(22)上靠近第二个法兰直线轴承(27)的地方,面朝滑台(28),当滚珠丝杆(25)上直线轴承所承载的滑台(28)移近第二个法兰直线轴承(27)时能受到滑台(28)的触碰。
技术总结
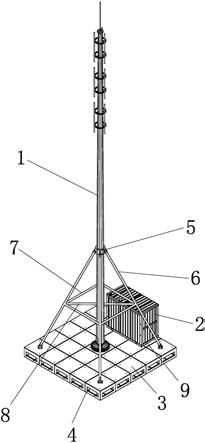
一种用于瓜类蔬菜种植的自动化耕具,其计算机通过超声波测距传感器、倾角传感器适时获取犁的高度与犁铧的入土角度,其第二套直线轴位移装置安置在第一套直线轴位移装置的滑台上,该滑台的下端连接第一金属板的上端,第一金属杆的上端连接在第二套直线轴位移装置的滑台的下端,第二金属板与犁的犁柱固定连接,两者同时通过一个转轴连接到第一金属板的下端,使得第二套直线轴位移装置能操作犁绕着第一金属板的下端转动,从而改变犁铧的入土角度,而第一套直线轴位移装置能调整犁的高度。既能监测犁的高度与犁铧的入土角度,又能自动调整犁铧的入土深度与入土角度,且动作机构远离土壤,避免了因工作时土壤沾染造成的故障。避免了因工作时土壤沾染造成的故障。避免了因工作时土壤沾染造成的故障。
技术研发人员:范爱丽 范静怡 黄凤婵 张曼 高忠奎 周建辉 刘文君 陈宝玲
受保护的技术使用者:广西壮族自治区农业科学院
技术研发日:2020.12.25
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。