1.本技术涉及内窥镜工作站领域,特别涉及一种内窥镜的工作站、一种柜体及一种内窥镜存储装置。
背景技术:
2.内窥镜作为一种用于进入生物体内部进行医疗检测的医疗耗材,需要严格地保障其卫生安全性。基于该需求,现有的医院相关科室一般采用基于内窥镜手术安排定量预购内窥镜,由内窥镜消毒站将经过统一消毒、杀菌的一次性内窥镜或重复性内窥镜,根据预购单内的内窥镜使用时间即时配送到相应科室的方式,存在灵活性差,预购、派单工作量大等问题。
技术实现要素:
3.本技术的一个目的在于提出一种内窥镜的工作站,旨在提供一种集成了内窥镜使用、储存等功能的一站式多功能内窥镜工作站,使得内窥镜手术医疗的安排可更加灵活,也极大地节省了预购、派单等工作量。
4.为解决上述技术问题,本技术采用如下技术方案:
5.本技术提出一种内窥镜的工作站,包括:内窥镜系统,所述内窥镜系统用于搭载内窥镜进行诊疗;内窥镜存储装置,所述内窥镜存储装置包括容纳空间和杀菌装置,所述容纳空间用于容纳内窥镜,所述杀菌装置配置为能对所述容纳空间内杀菌。
6.根据本技术的一些实施例,所述工作站包括柜体,所述柜体设置有系统搭载结构和箱体;所述内窥镜系统装配于所述系统搭载结构;所述容纳空间形成在所述箱体内,其中,所述箱体为所述柜体的一部分,或所述箱体和所述柜体为分体部件并且被组装连接在一起;所述杀菌装置包括银离子层,所述银离子层附设在所述箱体的内表面;所述杀菌装置包括杀菌灯,所述杀菌灯用于向所述容纳空间内辐射能杀菌的光线;所述杀菌装置包括灭菌介质提供站,所述灭菌介质提供站用于向所述容纳空间内提供灭菌介质。
7.根据本技术的一些实施例,所述箱体内的中部及中部以下的位置设置有所述杀菌灯;所述箱体内设置有壳体,所述容纳空间形成在所述箱体与所述壳体之间;所述壳体内形成有容纳腔,所述杀菌灯包括紫外灯和γ射线灯中的一种或多种的组合,所述杀菌灯位于所述容纳腔内,所述杀菌灯可拆卸地设置,其中,所述壳体设置有透光结构,所述透光结构能供光线穿过;所述容纳腔与所述容纳空间连通;所述内窥镜存储装置还包括空气循环装置,所述空气循环装置能驱动气体在所述容纳腔与所述容纳空间之间循环;所述内窥镜存储装置还包括第一检测装置,所述第一检测装置用于检测所述箱体的关门动作或检测所述箱体内的内窥镜数量是否增加,若所述第一检测装置检测到所述关门动作或检测到所述箱体内的内窥镜数量增加,则发出预设信号进行响应,所述预设信号用于触发所述灭菌介质提供站向所述容纳空间内提供所述灭菌介质以及触发所述空气循环装置关闭第一预设时长之后打开,或者所述预设信号用于触发所述杀菌灯在所述箱体的门体关闭之后的第二预
设时长内对所述容纳空间杀菌;所述灭菌介质包括臭氧和环氧乙烷中的一种或多种的组合。
8.根据本技术的一些实施例,所述内窥镜存储装置还包括:固定结构,位于所述容纳空间内,用于与所述内窥镜配合以固定所述内窥镜;取件装置,设于所述容纳空间内,配置为用于将所述内窥镜从所述固定结构处取出,或用于将所述内窥镜配置到所述固定结构上;驱动装置,与所述固定结构和所述取件装置中的一者传动连接,其中,所述固定结构和所述取件装置中与所述驱动装置传动连接的一者,能在所述驱动装置的驱动下相对于另一者运动。
9.根据本技术的一些实施例,所述内窥镜存储装置还包括:识别装置,配置为能读取内窥镜的标签信息,并能根据所述标签信息及数据库信息生成已使用次数信息;所述驱动装置响应于所述已使用次数信息,驱动所述取件装置将已使用次数少于预设次数的内窥镜配置到所述固定结构上。
10.根据本技术的一些实施例,所述驱动装置与所述取件装置传动连接,并能驱动所述取件装置运动,使所述取件装置能从所述固定结构处运载所述内窥镜至目标位置;所述驱动装置还配置为能获取内窥镜需求中的内窥镜种类信息,并能根据所述内窥镜种类信息定位与所述内窥镜种类信息匹配的所述固定结构,以及能驱动所述取件装置从所定位的所述固定结构处获取所述内窥镜;所述驱动装置包括第一电机、第一带轮、第二带轮和传送带,所述第一带轮能在所述第一电机的驱动下转动,所述传送带与所述第一带轮及所述第二带轮配合,所述取件装置与所述传送带相连,当所述传送带运动能带动所述取件装置运动;所述内窥镜存储装置还包括升降装置,所述升降装置与所述取件装置传动连接,并能驱动所述取件装置运动,使所述取件装置的位置升高或降低;所述取件装置包括机械臂,所述机械臂与所述驱动装置传动连接,所述机械臂设置有夹钳,所述夹钳能够夹取所述内窥镜。
11.根据本技术的一些实施例,所述容纳空间内设置有容纳槽,所述容纳槽水平布置,所述容纳槽用于容纳所述内窥镜并使得所述内窥镜在所述容纳槽内被水平放置;所述容纳槽设置有卡扣,所述卡扣用于与所述内窥镜卡接以固定所述内窥镜,或所述容纳槽具有喉部且所述喉部能与所述内窥镜卡接以固定所述内窥镜。
12.根据本技术的一些实施例,所述内窥镜存储装置还包括:多个挂架,所述挂架用于悬挂所述内窥镜;传送机构,与多个所述挂架连接,用于驱动多个所述挂架运动;其中,所述内窥镜存储装置具有预设取件位置,多个所述挂架在所述传送机构的驱动下能依次经过所述预设取件位置。
13.根据本技术的一些实施例,所述内窥镜存储装置还包括:第二检测装置,用于检测所述挂架上是否悬挂有所述内窥镜;第一控制器,与所述第二检测装置及所述传送机构电连接,并能根据所述第二检测装置的检测结果判断所述预设取件位置处的所述挂架上是否悬挂有所述内窥镜;若是,响应于取件指令控制所述传送机构停止驱动多个所述挂架运动,或响应于补件指令控制所述传送机构驱动多个所述挂架运动直至悬挂有所述内窥镜的所述挂架运动至所述预设取件位置;若否,响应于取件指令控制所述传送机构驱动多个所述挂架运动直至悬挂有所述内窥镜的所述挂架运动至所述预设取件位置,或响应于补件指令控制所述传送机构停止驱动多个所述挂架运动。
14.根据本技术的一些实施例,所述内窥镜存储装置还包括:调温系统,配置为能调节
所述容纳空间内的温度;湿度调节装置,配置为能调节所述容纳空间内的湿度。
15.根据本技术的一些实施例,所述调温系统包括空调系统或电加热系统;和/或所述调温系统配置为能调节所述容纳空间内的温度至第一目标温度,其中,所述第一目标温度高于或等于人体体温;和/或所述工作站还配置为能够根据所述容纳空间内的当前湿度控制所述调温系统;和/或所述工作站还配置为根据手术预约安排控制所述调温系统,其中,根据手术预约安排控制所述调温系统的步骤包括:根据所述手术预约安排确定手术开始时间,控制所述调温系统在比所述手术开始时间提前第三预设时长的时刻开始对所述容纳空间内加热,直至所述容纳空间内的温度达到第一目标温度后开始保温;根据所述手术预约安排确定空闲时间段,根据所述空闲时间段控制所述调温系统将所述容纳空间内的温度控制在第二目标温度,其中,所述第二目标温度低于所述第一目标温度。
16.根据本技术的一些实施例,所述工作站具有第二控制器,其中,所述湿度调节装置包括:加湿器,配置为能对所述容纳空间加湿;抽湿器,配置为能对所述容纳空间除湿;湿度检测装置,用于检测所述容纳空间内的当前湿度,并将检测结果反馈给所述第二控制器,其中,所述第二控制器内存储有计算机程序,所述第二控制器执行所述计算机程序时能实现如下步骤:获取所述当前湿度;判断所述当前湿度与目标湿度之间的差值关系;若所述当前湿度大于所述目标湿度,且所述当前湿度与所述目标湿度的差值大于第一预设阈值,控制所述抽湿器对所述容纳空间除湿;若所述当前湿度与所述目标湿度之间的差值小于等于所述第一预设阈值,控制所述抽湿器关闭;若所述当前湿度小于所述目标湿度,且所述当前湿度与所述目标湿度的差值大于第二预设阈值,控制所述加湿器对所述容纳空间加湿;若所述当前湿度与所述目标湿度之间的差值小于等于所述第二预设阈值,控制所述加湿器关闭。
17.根据本技术的一些实施例,所述内窥镜存储装置还包括:第一显示装置,所述第一显示装置用于显示内窥镜信息,其中,所述内窥镜信息包括以下至少一种:所述容纳空间内的内窥镜数量、所述容纳空间内的内窥镜种类、所述容纳空间内的当前温度、所述容纳空间内的当前湿度、手术室在预设时间内所述内窥镜的数量需求、手术室在预设时间内所述内窥镜的种类需求;所述第一显示装置还用于显示第一用户图形交互界面,并获取相应的第一操作指令,所述第一操作指令用于控制所述内窥镜存储装置。
18.根据本技术的一些实施例,所述内窥镜系统包括至少一个医疗设备和至少一个第二显示装置,所述医疗设备和所述第二显示装置分别设置在所述柜体上,所述医疗设备用于搭载所述内窥镜进行诊疗,所述第二显示装置用于显示所述内窥镜的图像信息。
19.根据本技术的一些实施例,所述柜体上设置有凹槽,所述第二显示装置能相对于所述柜体运动,以被收纳于所述凹槽内或离开所述凹槽;和/或所述系统搭载结构包括臂架,所述臂架的一端与所述柜体连接,另一端与所述第二显示装置连接,所述臂架能变形或折叠使得所述第二显示装置能运动;和/或所述系统搭载结构包括形成在所述柜体内的设备室,所述柜体设置有与所述设备室连通的开口,所述医疗设备设置在所述设备室内,所述医疗设备具有操作面板,所述操作面板位于所述开口处,所述操作面板上设置有接口,所述接口用于连接包括所述内窥镜在内的医疗器械,其中,所述医疗设备包括机壳及内容物,所述内容物至少一部分位于所述机壳内,所述内容物包括内窥镜冲洗吸引器、图像处理装置、打印机中的一种或多种;和/或所述医疗设备的操作面板上设置有第三显示装置,所述医疗
设备内设置有泵体,所述泵体包括气水供应泵、气体供应泵和负压抽吸泵中的至少一者,所述第三显示装置用于显示第二用户图形交互界面,并获取相应的第二操作指令,所述第二操作指令用于控制所述泵体;和/或所述医疗设备的图像处理装置与所述第二显示装置电连接,所述图像处理装置配置为获取来自所述内窥镜的图像信息,并对来自所述内窥镜的图像信息进行处理,以及将处理后所述内窥镜的图像信息反馈给所述第二显示装置,所述第二显示装置具体用于显示经由所述图像处理装置处理后所述内窥镜的图像信息;和/或所述柜体具有第一侧面、第二侧面和第三侧面,所述第一侧面与所述第二侧面之间形成转角过渡,其中,所述第一侧面设置有所述第二显示装置、所述箱体的门体和所述医疗设备的操作面板,所述第三侧面与所述第一侧面位于所述柜体相对的两侧,所述第三侧面或所述第二侧面设置有所述第二显示装置,所述柜体设置有镜架,所述镜架位于所述第一侧面与所述第二侧面之间的所述转角过渡处,所述镜架用于与所述内窥镜配合以固定所述内窥镜,所述第一侧面上的所述第二显示装置与所述操作面板上下排列设置,所述箱体的门体与所述第一侧面上的所述第二显示装置及所述操作面板左右排列设置,所述第一侧面还设置有物品放置结构,所述第一侧面上的所述第二显示装置还用于显示内窥镜信息,其中,所述内窥镜信息包括以下至少一种:所述容纳空间内的内窥镜数量、所述容纳空间内的内窥镜种类、所述容纳空间内的当前温度、所述容纳空间内的当前湿度、手术室在预设时间内所述内窥镜的数量需求、手术室在预设时间内所述内窥镜的种类需求。
20.本技术还提出一种柜体,用于内窥镜的工作站,所述柜体设置有系统搭载结构和内窥镜存储装置;所述内窥镜存储装置包括容纳空间和杀菌装置,所述容纳空间用于容纳内窥镜,所述杀菌装置配置为能对所述容纳空间内杀菌;所述系统搭载结构用于装载内窥镜系统。
21.本技术还提出一种内窥镜存储装置,用于内窥镜的工作站,所述内窥镜存储装置包括:箱体,所述箱体内形成有容纳空间,所述容纳空间用于容纳内窥镜;杀菌装置,配置为能对所述容纳空间内杀菌;调温系统,配置为能调节所述容纳空间内的气体温度;湿度调节装置,配置为能调节所述容纳空间内的湿度。
22.在本技术中,设置内窥镜的工作站,集成了用于搭载内窥镜进行诊疗的内窥镜系统,以及用于存储内窥镜并能实现对存储的内窥镜进行杀菌的内窥镜存储装置,可以为内窥镜手术提供一站式服务,使用灵活性更好,且通过集成内窥镜存储杀菌功能,可以保障医院相应科室在一段时间内的内窥镜自助供给,从而免于临时需要、临时预购、临时派单的繁琐工作,节省社会资源,也提升了工作的高效性。
23.应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本技术。
附图说明
24.通过参照附图详细描述其示例实施例,本技术的上述和其它目标、特征及优点将变得更加显而易见。
25.图1是根据一实施方式示出的内窥镜工作站的主视结构示意图;
26.图2是根据一实施方式示出的内窥镜工作站的后视结构示意图;
27.图3是根据一实施方式示出的内窥镜工作站的左视结构示意图;
28.图4是根据一实施方式示出的内窥镜工作站的右视结构示意图;
29.图5是根据一实施方式示出的内窥镜工作站的俯视结构示意图;
30.图6是根据一实施方式示出的内窥镜工作站的仰视结构示意图;
31.图7是图3中所示a
‑
a剖面的结构示意图;
32.图8是图3中所示b
‑
b剖面的结构示意图;
33.图9是根据一实施方式示出的内窥镜存储装置的部分结构示意图;
34.图10是根据一实施方式示出的内窥镜存储装置的部分结构示意图;
35.图11是根据一实施方式示出的内窥镜存储装置的部分结构示意图;
36.图12是根据一实施方式示出的调温系统的结构示意图;
37.图13是根据一实施方式示出的调温系统的示意结构框图;
38.图14是根据一实施方式示出的湿度调节装置的示意结构框图。
39.附图标记说明如下:
40.工作站1000;柜体100;镜架120;设备室130;物品放置结构140;行走机构150;锁定结构160;电源口170;内窥镜系统200;医疗设备210;操作面板211;接口212;第二显示装置c221;第二显示装置d222;内窥镜存储装置300;箱体310;壳体311;门体312;容纳空间313;杀菌灯320;固定结构331;取件装置332;驱动装置333;挂架341;主动盘3422;从动盘3423;连接件3424;第二检测装置343;调温系统350;空调系统351;压缩机3511;第一换热器3512;第二换热器3513;节流单元3514;换向阀3515;电加热系统352;空气循环装置353;湿度调节装置360;加湿器361;抽湿器362;湿度检测装置363;悬挂装置370;内窥镜400。
具体实施方式
41.尽管本技术可以容易地表现为不同形式的实施方式,但在附图中示出并且在本说明书中将详细说明的仅仅是其中一些具体实施方式,同时可以理解的是本说明书应视为是本技术原理的示范性说明,而并非旨在将本技术限制到在此所说明的那样。
42.由此,本说明书中所指出的一个特征将用于说明本技术的一个实施方式的其中一个特征,而不是暗示本技术的每个实施方式必须具有所说明的特征。此外,应当注意的是本说明书描述了许多特征。尽管某些特征可以组合在一起以示出可能的系统设计,但是这些特征也可用于其他的未明确说明的组合。由此,除非另有说明,所说明的组合并非旨在限制。
43.在附图所示的实施方式中,方向的指示(诸如上、下、左、右)用于解释本技术的各种元件的结构和运动不是绝对的而是相对的。当这些元件处于附图所示的位置时,这些说明是合适的。如果这些元件的位置的说明发生改变时,则这些方向的指示也相应地改变。
44.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些示例实施方式使得本技术的描述将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。附图仅为本技术的示意性图解,并非一定是按比例绘制。图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。
45.以下结合本说明书的附图,对本技术的较佳实施方式予以进一步地详尽阐述。
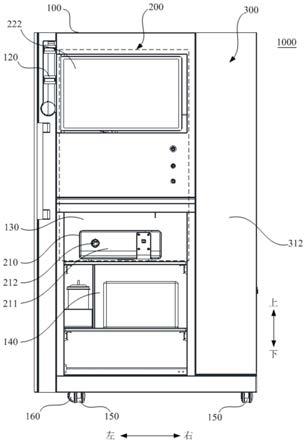
46.如图1所示,本技术的一个实施例提供了一种内窥镜的工作站1000,该内窥镜工作
站1000集成有内窥镜系统200和内窥镜存储装置300。
47.具体地,内窥镜系统200用于搭载内窥镜400进行诊疗。例如,当进行内窥镜400手术时,内窥镜400的接线端连接到内窥镜系统200,实现内窥镜400与内窥镜系统200之间的电流传输和/或信号传输。
48.内窥镜存储装置300包括容纳空间313和杀菌装置,容纳空间313用于容纳内窥镜400,杀菌装置配置为能对容纳空间313内杀菌。这样,容纳空间313内利用杀菌装置进行杀菌形成相对卫生、安全的保存环境,将购置的内窥镜400容纳于容纳空间313内,满足内窥镜400无菌环境保存需求的同时,利用内窥镜400存量可以良好地保障医院的即时内窥镜400使用需求,可以更好地应对内窥镜400突发需求情形,医疗安排也更加灵活,医院也无须即买即用地繁琐购置内窥镜400,节省工作量。
49.在某些实施例中,如图1所示,工作站1000包括柜体100,内窥镜系统200和内窥镜存储装置300设置于柜体100。这样,实现内窥镜系统200和内窥镜存储装置300一体集成的设置,进行内窥镜手术时,将柜体100一体转移到手术室即可,实现工作站1000一站式转移和使用,使用更加方便、灵活。
50.在某些具体实施例中,如图7所示,柜体100设置有系统搭载结构和箱体310,内窥镜系统200装配于系统搭载结构,容纳空间313形成在箱体310内。这样,通过柜体100实现内窥镜系统200与内窥镜存储装置300良好地集成与融合。
51.具体举例地,内窥镜系统200包括医疗设备210和第二显示装置(第二显示装置具体可以参照附图1和图2中所示的第二显示装置c221和第二显示装置d222进行理解)。系统搭载结构包括设备室130,医疗设备210容纳于设备室130内。系统搭载结构还包括臂架,臂架设置在柜体100上,第二显示装置被安装在臂架上。
52.可选地,箱体310为柜体100的一部分,换言之,例如,柜体100通过隔板分隔形成多个间室,其中一个间室设置为设备室130,另一个间室为箱体310。或者,在其他实施例中,箱体310和柜体100也为分体部件并且被组装连接在一起。
53.如此,实现内窥镜系统200和内窥镜存储装置300在柜体100内有条不紊地布置,产品部件之间的集成度更高、部件之间归置得更紧凑、有序,相比于利用多个台车分别搭载的结构而言,不会出现台车之间连接线凌乱等问题,能够为医疗人员提供更便利和舒适的操作环境,且通过该集成设置,可以实现工作站1000一站式转移,工作站1000转移操作更方便也更安全。
54.更优选地,如图1所示,柜体100设置有行走机构150。这样,对柜体100转移更加省力,使用更加方便。进一步举例地,行走机构150具体包括滚轮,利用滚轮可以实现将柜体100灵活地推动到适合的位置。进一步地,一个或多个滚轮处设置有锁定结构160,用于当柜体100被移动到适合位置后,通过锁定结构160将相应的滚轮锁紧以限制其运动,实现柜体100被稳定于该适合的位置。
55.在某些实施例中,如图8、图9和图10所示,杀菌装置包括杀菌灯320,杀菌灯320用于向容纳空间313内辐射能杀菌的光线。进一步举例地,杀菌灯320包括紫外灯和γ射线灯中的一种或多种的组合。可以实现高效地杀菌,且杀菌效果良好。
56.在某些具体实施例中,箱体310内的中部及中部以下的位置设置有杀菌灯320。可以理解,对于悬挂在容纳空间313内的内窥镜400,其用于进入生物体内部的部位可以被该
箱体310内中部及中部以下位置处的杀菌灯320充分地照射,这样,内窥镜400用于进入生物体内部的部位杀菌可靠性更好,使用安全性更好。
57.在某些实施例中,如图8、图9和图10所示,箱体310内设置有壳体311,容纳空间313形成在箱体310与壳体311之间。壳体311内形成有容纳腔,杀菌灯320位于容纳腔内,壳体311设置有透光结构,透光结构能供光线穿过。这样,实现杀菌灯320对容纳空间313内辐射光线进行杀菌的同时,利用壳体311可以对杀菌灯320起到良好地防护作用,降低杀菌灯320损坏风险。
58.详细举例而言,透光结构可具体包括设置在壳体311上的通孔,使得杀菌灯320的光线沿着该通孔辐射到容纳空间313内。或者,壳体311的局部或整体采用透光材料制作,以使得壳体311的局部或整体成为可供杀菌灯320的光线穿过的透光结构。
59.在某些实施例中,如图8、图9和图10所示,杀菌灯320可拆卸地设置,例如,杀菌灯320通过壳体311上的卡扣卡接在壳体311上,或者杀菌灯320以卡接、螺钉连接等方式安装在壳体311内的灯座上。这样可以方便更换杀菌灯320,以保障工作站1000的内窥镜存储装置300的寿命。
60.在某些实施例中,容纳腔与容纳空间313连通。例如,容纳腔与容纳空间313之间通过设置在壳体311上的通孔连通,该通孔可同时实现杀菌灯320的光线沿通孔辐射到容纳空间313内。
61.进一步地,内窥镜存储装置300还包括空气循环装置353,空气循环装置353能驱动气体在容纳腔与容纳空间313之间循环。这样,空气循环装置353可以将空气吸入容纳腔内进行高效地辐射灭菌后,将灭菌后的空气排入容纳空间313内,这样更利于容纳空间313内灭菌的均匀性,降低卫生死角风险,从而可以为内窥镜400提供更优异的无菌存储环境。
62.进一步举例地,空气循环装置353可具体为风扇。
63.在某些实施例中,杀菌装置包括银离子层(图中未示出),银离子层附设在箱体310的内表面。
64.可以理解的是,利用空气循环装置353驱动容纳空间313内的空气循环,也可利于银离子层表面的气体流动,利于银离子层表面的等离子体在容纳空间313内均匀分散,提升银离子层的杀菌效果和效率。
65.在某些实施例中,杀菌装置包括灭菌介质提供站(图中未示出),灭菌介质提供站用于向容纳空间313内提供灭菌介质。进一步举例地,灭菌介质提供站具体包括用于提供臭氧和/或环氧乙烷的灭菌介质提供站。可以实现高效地杀菌,且杀菌效果良好。
66.对于采用杀菌装置包括灭菌介质提供站的内窥镜存储装置300,优选地对该内窥镜存储装置300同时配置空气循环装置353,这样有利于灭菌介质提供站提供的灭菌介质在容纳空间313内分散均匀,从而提升灭菌效果,避免卫生死角。
67.更进一步地,内窥镜存储装置300还包括第一检测装置,第一检测装置用于检测箱体310的关门动作或检测箱体310内的内窥镜400数量是否增加,若第一检测装置检测到关门动作或检测到箱体310内的内窥镜400数量增加,则发出预设信号进行响应。
68.进一步举例地,第一检测装置可包括距离传感器、红外对管、微动开关中的一种或多种,用于检测箱体310的门体312的开闭。和/或第一检测装置可包括称重传感器、微动开关,用于通过检测重量变化或检测内窥镜400的触按以判断箱体310内的内窥镜400数量是
否增加。
69.进一步可选地,对于内窥镜存储装置300设置有灭菌介质提供站和空气循环装置353的方案,预设信号用于触发灭菌介质提供站向容纳空间313内提供灭菌介质,以及触发空气循环装置353关闭第一预设时长之后打开。可以理解的是,第一预设时长可以根据箱体310容积、灭菌介质类型等进行灵活地设计,例如第一预设时长的取值范围为1min~30min。
70.这样,当箱体310的门体312被打开之后,或者箱体310内被放入内窥镜400,第一检测装置发出预设信号以控制灭菌介质提供站向容纳空间313内提供灭菌介质对容纳空间313灭菌,这样可以避免由于箱体310的门体312打开或箱体310内进入新的内窥镜400引起的容纳空间313环境污染,且通过在利用灭菌介质对容纳空间313内进行灭菌的第一预设时长时间范围内,使空气循环装置353保持关闭,这样可以使得灭菌介质可以进行集中、高效地灭菌,最大限度地避免细菌繁殖扩散,在利用灭菌介质对容纳空间313内进行灭菌的第一预设时长时间之后,打开空气循环装置353促进容纳空间313内气体循环,保障容纳空间313内灭菌介质分布均匀性,达到充分净化死角的目的,利于容纳空间313内长时间保持良好的存储环境。
71.进一步可选地,对于内窥镜存储装置300设置有杀菌灯320的方案,预设信号用于触发杀菌灯320在箱体310的门体312关闭之后的第二预设时长内对容纳空间313杀菌。可以理解的是,第二预设时长可以根据箱体310容积、灭菌介质类型等进行灵活地设计,例如第二预设时长的取值范围为1min~60min,进一步举例地,第二预设时长的取值范围为15min~45min,优选地,第二预设时长为30min。
72.这样,当箱体310的门体312被打开之后,或者箱体310内被放入内窥镜400,第一检测装置发出预设信号以控制杀菌灯320以常亮形式或间歇开闭的形式保持工作第二预设时长以对容纳空间313高效地灭菌,可以最大限度地避免细菌繁殖扩散,利于容纳空间313内长时间保持良好的存储环境。
73.在某些优选实施例中,杀菌装置包括银离子层和灭菌介质提供站中的至少一者和杀菌灯320,这样,杀菌灯320和银离子层/灭菌介质提供站分别杀菌的同时,杀菌灯320的光线可以同时激发银离子层/灭菌介质,从而强化银离子层/灭菌介质的杀菌效果,实现杀菌效果的有效提升,更好地保障内窥镜400存储环境的卫生、安全性。
74.在某些实施例中,如图9和图10所示,内窥镜存储装置300还包括:固定结构331和取件装置332。具体地,固定结构331位于容纳空间313内,用于与内窥镜400配合以固定内窥镜400。取件装置332设于容纳空间313内,配置为用于将内窥镜400从固定结构331处取出,或用于将内窥镜400配置到固定结构331上。这样,无需医护人员从固定结构331处手动取件或无需医护人员手动配置内窥镜400到固定结构331上,减少固定结构331处的污染风险,更好地维护箱体310内环境卫生、干净。
75.举例而言,如图9和图10所示,取件装置332包括机械臂,机械臂的一端被连接,另一端设置有夹钳,夹钳能够夹取内窥镜400。其中,利用机器人机械臂取放内窥镜400,具有较好的灵活性和可靠性,可以减少取放过程中的内窥镜400损伤,并且利用机器人机械臂良好的避障精度,也减少了箱体310内损伤问题。更详细地,如图9和图10所示,机械臂包括多个臂节,相邻臂节之间连接并能相对转动,使得机械臂通过臂节之间转动可以灵活地伸展或收缩以调整机械臂形态,取放内窥镜400更灵活、方便。
76.进一步举例地,臂节之间设置有电机并通过电机驱动臂节之间的转动,驱动装置333包括该电机,以实现驱动机械臂;或者,机械臂上设置有拉绳,通过马达驱动拉绳,使拉绳牵引臂节实现臂节之间的转动,驱动装置333包括该马达,以实现驱动机械臂。当然,对于夹钳可单独活动的结构,驱动装置333还可进一步包括用于驱动夹钳的机构,如电机及电机驱动的齿轮齿条机构等。
77.在本技术第一方面的一些实施例中,如图10所示,内窥镜存储装置300还包括驱动装置333,驱动装置333与机械臂传动连接,并能驱动机械臂运动。
78.其中,驱动装置333还配置为能获取内窥镜需求中的内窥镜种类信息,并能根据内窥镜种类信息定位与内窥镜种类信息匹配的固定结构331,以及能驱动机械臂从所定位的固定结构331处获取内窥镜400,并使机械臂能从固定结构331处运载内窥镜400至目标位置。
79.这样,医护人员利用终端设备(终端设备例如包括内窥镜系统200所配置的带有用户交互界面的显示装置)发出携带有内窥镜种类信息的内窥镜需求后,驱动装置333识别到该内窥镜种类信息,这样,驱动装置333驱动机械臂从该内窥镜种类信息对应的固定结构331处取下内窥镜400,并将内窥镜400运载至目标位置。这样,医护人员直接在目标位置处取到符合该内窥镜需求的内窥镜400,无需医护人员在箱体310内手动查找,减少了箱体310内污染隐患,也降低了取件的错误率,工作站1000的使用更加可靠、高效、便捷。
80.可选地,目标位置可具体为箱体310的门体312位置,以使得机械臂从固定结构331处取下内窥镜400后可运载内窥镜400至箱体310的门体312位置处,这样,医护人员可打开门体312从门体312处直接取用机械臂提供的内窥镜400,医护人员肢体无需伸入箱体310内,降低箱体310内污染风险。
81.可选地,箱体310设置有取件窗口,目标位置可具体为该取件窗口,以使得机械臂从固定结构331处取下内窥镜400后可运载内窥镜400至取件窗口以供医护人员取用,这样,医护人员肢体无需伸入箱体310内取件,并且也减少了箱体310的开门次数,进一步降低箱体310内污染风险。
82.更具体举例而言,如图10所示,驱动装置333包括第一电机、第一带轮、第二带轮和传送带,第一带轮能在第一电机的驱动下转动,传送带与第一带轮及第二带轮配合;固定结构331固定设置,例如固定结构331与箱体310内的壳体311固定连接,或者固定结构331固定设置在箱体310的顶板上;机械臂与传送带相连,当传送带运动能带动机械臂运动,使得机械臂在固定结构331与目标位置之间运动。这样,当机械臂从固定结构331处取内窥镜400后,第一电机通过第一带轮或第二带轮使传送带运动,从而将机械臂及机械臂上的内窥镜400运载至目标位置,或者,在补件时,机械臂在目标位置抓取内窥镜400后,传送带将机械臂从目标位置运载至固定结构331处以供机械臂将抓取的内窥镜400配置到固定结构331上,实现向固定结构331自动补件。其中,传送带运送具有位置准确、平稳性好的优点。
83.优选地,内窥镜存储装置300还包括升降装置,升降装置与取件装置332传动连接,并能驱动取件装置332运动,使取件装置332的位置升高或降低。这样,通过升降装置驱动取件装置332上升或下降至方便医护人员取用的位置,更方便医护人员从取件装置332上取用内窥镜400,使用更加方便。
84.具体举例而言,升降装置设置在传送带上,并驱动机械臂使得机械臂相对于传送
带上升或下降。或者,存储装置设置有升降平台,箱体310内的壳体311、驱动装置333等均设置在升降平台上,升降装置驱动升降平台上升或下降。
85.更具体举例地,升降平台包括电机和传动机构,传动机构包括齿轮齿条机构或链轮链条机构,当电机工作,使得齿条/链条上升或下降。
86.在本技术第二方面的一些实施例中,如图9所示,内窥镜存储装置300还包括驱动装置333,不同于图10所示的实施例中的结构,本实施例与图10所示的实施例区别之处包括:
87.驱动装置333与固定结构331传动连接,并能驱动固定结构331运动,从而实现驱动固定结构331上的内窥镜400运动。例如,固定结构331连接于驱动装置333的传送带上,以在传送带的驱动下运动。
88.这样,取件装置332可以设置为位置固定的结构,例如,取件装置332固设在箱体310的顶板上,优选地,取件装置332的位置优选设定为目标位置(目标位置具体如:箱体310的门体312位置或取件窗口等),这样,在取件或补件过程中,驱动装置333驱动固定结构331至目标位置后,取件装置332从目标位置处的固定结构331上取内窥镜400实现取件,或取件装置332向目标位置处的固定结构331上配置内窥镜400实现补件。如此,当医护人员需要取用内窥镜400或需要向固定结构331上补充内窥镜400时,驱动装置333将相应的固定结构331驱动至取件装置332处,以供取件装置332取下内窥镜400递给医护人员以实现取件,或者供取件装置332抓取内窥镜400配置到固定结构331上实现补件,降低取件或补件过程对箱体310内环境的污染风险。
89.上述第一方面实施例和第二方面实施例相同之处可包括:机械臂结构、驱动装置333根据内窥镜需求中的内窥镜种类信息来驱动固定结构331、升降装置等,本领域技术人员可参照上述第一方面中实施例来理解第二方面实施例中的相同特征,再次不再重复。
90.上述任一实施例中,内窥镜存储装置300还包括识别装置,该识别装置配置为能读取内窥镜400的标签信息,并能根据标签信息及数据库信息生成已使用次数信息;驱动装置333响应于已使用次数信息,驱动取件装置332将已使用次数少于预设次数的内窥镜400配置到固定结构331上。
91.例如,对于用于搭载一次性内窥镜400的内窥镜工作站1000,该预设次数可具体为1次,驱动装置333用于驱动取件装置332将已使用次数少于1次的内窥镜400配置到固定结构331上。
92.在某些具体的实施例中,标签信息具体例如为rfid标签,内窥镜存储装置300的识别装置包括检测箱,检测箱获取rfid标签信息,并与服务器中存储的rfid数据库作比较,以判断该内窥镜400的已使用次数是否少于预设次数(如是否少于1次),若是,发出信号触发驱动装置333,使驱动装置333将rfid标签对应的内窥镜400配置到固定结构331上进行响应,若否,驱动装置333不对当前rfid标签的内窥镜400进行配置。
93.上述任一实施例的一个可选方案,固定结构331包括挂钩,挂钩用于悬挂内窥镜400,使得内窥镜400在容纳空间313内被悬挂布置。
94.上述任一实施例的一个可选方案,如图7所示,固定结构具体为悬挂装置370,以用于悬挂内窥镜400,使得内窥镜400被悬挂布置在容纳空间313内。更具体例如,悬挂装置370包括固定卡,固定卡设置在箱体310内的中部以上的位置,用于卡接内窥镜400,使得内窥镜
400在容纳空间313内被悬挂布置。
95.上述任一实施例的一个可选方案,容纳空间313内设置有容纳槽(图中为示出),容纳槽水平布置,容纳槽用于容纳内窥镜400并使得内窥镜400在容纳槽内被水平放置。这样可利于提升容纳空间313的容纳能力,实现容纳更多的内窥镜400。
96.进一步地,容纳槽设置有卡扣,卡扣用于与内窥镜400卡接以固定内窥镜400,或容纳槽具有喉部且喉部能与内窥镜400卡接以固定内窥镜400。这样有利于内窥镜400在容纳槽内装配稳定。
97.在本技术的一些实施例中,内窥镜存储装置300还包括:多个挂架341和传送机构。挂架341用于悬挂所述内窥镜400。传送机构与多个挂架341连接,传送机构用于驱动多个挂架341运动;其中,内窥镜存储装置300具有预设取件位置,多个挂架341在传送机构的驱动下能依次经过预设取件位置。可以理解的是,预设取件位置可以理解为用于供医护人员从挂架341上取下内窥镜400或向挂架341上补充内窥镜400的位置,例如为箱体310的门体312位置处,或其他临近门体312的地方,又或者,为箱体310上设置的取件窗口位置。
98.进一步地,内窥镜存储装置300还包括:第二检测装置343和第一控制器。
99.其中,第二检测装置343用于检测挂架341上是否悬挂有内窥镜400;第一控制器与第二检测装置343及传送机构电连接,并能根据第二检测装置343的检测结果判断预设取件位置处的挂架341上是否悬挂有内窥镜400。
100.对于取件工况:
101.若是,响应于取件指令控制传送机构停止驱动多个挂架341运动。
102.若否,响应于取件指令控制传送机构驱动多个挂架341运动,直至悬挂有内窥镜400的挂架341运动至预设取件位置。
103.这样可以有效控制,使得停靠在预设取件位置处的挂架341上有内窥镜400供医护人员直接取用,避免预设取件位置处的挂架341上空钩的问题。
104.对于补件工况:
105.若是,响应于补件指令控制传送机构驱动多个挂架341运动,直至悬挂有内窥镜400的挂架341运动至预设取件位置。
106.若否,响应于补件指令控制传送机构停止驱动多个挂架341运动。
107.这样可以有效控制,使得停靠在预设取件位置处的挂架341上位空钩,以供医护人员向预设取件位置处的挂架341上配置内窥镜400。
108.更详细举例地,如图11所示,传送装置包括主动盘3422、从动盘3423和位于主动盘3422与从动盘3423之间的链条,链条上设置有多个挂架341,挂架341具体为挂钩,挂钩用于勾住内窥镜400的部位设置有第二检测装置343,第二检测装置343具体为称重传感器,当挂钩上悬挂有内窥镜400,称重传感器感应到重量增加,从而形成该挂钩上悬挂有内窥镜400的判断结果。主动盘3422和从动盘3423上设置有连接件3424,连接件3424用于与箱体310的顶板连接,以实现将主动盘3422和从动盘3423可转动地连接于箱体310的顶板,这样,内窥镜400与传送机构一起被悬挂在箱体310的顶板上。
109.上述任一实施例中,内窥镜存储装置300还包括调温系统350和湿度调节装置360。调温系统350配置为能调节容纳空间313内的温度;湿度调节装置360配置为能调节容纳空间313内的湿度。这样可以通过控制调温系统350和湿度调节装置360实现调节容纳空间313
内至适合灭菌保存或适合对内窥镜400防护的温度和湿度条件,提升对内窥能镜的保存效果。
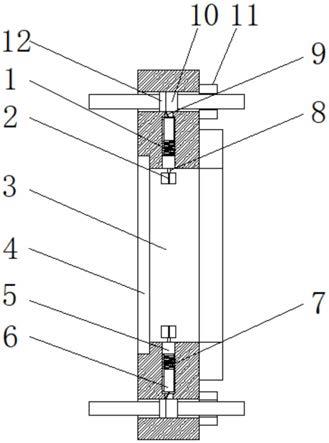
110.在某些实施例中,调温系统350包括空调系统351。更具体举例地,如图12所示,空调系统351包括压缩机3511、第一换热器3512、第二换热器3513、节流单元3514、换向阀3515。压缩机3511的排气口和回气口分别与换向阀3515连接,换向阀3515与第一换热器3512及第二换热器3513连接,节流单元3514与第一换热器3512及第二换热器3513连接。空气循环装置353包括风扇,风扇能驱动气体与第二换热器3513换热,并使换热后的气体进入容纳空间313。
111.如图12所示,当空调系统351对容纳空间313加热,换向阀3515使压缩机3511的排气口与第二换热器3513连通,使压缩机3511的回气口与第一换热器3512连通,第二换热器3513对气体加热。
112.当空调系统351对容纳空间313降温,换向阀3515使压缩机3511的排气口与第一换热器3512连通,使压缩机3511的回气口与第二换热器3513连通,第二换热器3513对气体降温。
113.当然,对于仅需要对容纳空间313加热的情况,可以省略换向阀3515,直接将压缩机3511的排气口连接至第二换热器3513,将压缩机3511的回气口连接至第一换热器3512。
114.在某些实施例中,如图13所示,调温系统350包括电加热系统352,电加热系统352具体例如包括电热器,如电热丝、电热管等,电热器通电产生热量,该热量提供至容纳空间313以对容纳空间313内供热。
115.在某些实施例中,调温系统350配置为能调节容纳空间313内的温度至第一目标温度,其中,第一目标温度高于或等于人体体温。这样,从容纳空间313取出的内窥镜400的温度高于等于人体体温,内窥镜400进入人体进行检测的时候不容易出现头端镜头起雾的问题。
116.更优选地,第一目标温度高于人体温度(如36.2℃)且低于等于42℃。进一步限制第一目标温度低于等于42℃,可以防止电路板失效,极大降低内窥镜400老化风险,有效保障内窥镜400使用寿命。
117.在某些实施例中,工作站1000还配置为根据手术预约安排控制调温系统350,其中,根据手术预约安排控制调温系统350的步骤包括:
118.根据手术预约安排确定手术开始时间,控制调温系统350在比手术开始时间提前第三预设时长的时刻开始对容纳空间313内加热,直至容纳空间313内的温度达到第一目标温度后开始保温;
119.根据手术预约安排确定空闲时间段,根据空闲时间段控制调温系统350将容纳空间313内的温度控制在第二目标温度,其中,第二目标温度低于第一目标温度。
120.这样,在无手术安排的空闲时间段,可以将容纳空间313内温度控制在第二目标温度(第二目标温度具体例如为室温温度,举例而言为25℃),可以节约能耗,并且进一步减缓容纳空间313内的内窥镜400及内窥镜400外包装老化。在有手术安排时,控制调温系统350在比手术开始时间提前第三预设时长(第三预设时长例如为10min~30min,具体举例地为20min)的时刻开始对容纳空间313内加热,直至容纳空间313内的温度达到第一目标温度后开始保温。这样,在医疗人员取用内窥镜400时,内窥镜400温度基本可达第一目标温度,其
中,第一目标温度高于人体温度(如36.2℃)、低于等于42℃,这样既避免了内窥镜400起雾问题,同时避免了内窥镜400老化或电路板失效问题。
121.在某些实施例中,工作站1000还配置为能够根据容纳空间313内的当前湿度控制调温系统350。这样可以更好地结合露点温度实现更精确地调控容纳空间313内的湿度和温度,更好地防止细菌滋生。
122.举例而言,在对容纳空间313内干燥处理时,可以根据容纳空间313内当前的湿度和露点温度调节容纳空间313内的温度为露点温度以上,促进对容纳空间313的干燥效率,防止滋生细菌,也避免内窥镜400外包装凝水。
123.在某些实施例中,如图14所示,工作站1000具有第二控制器,其中,湿度调节装置360包括:加湿器361、抽湿器362(也可以称之为除湿器)、湿度检测装置363。
124.加湿器361,配置为能对容纳空间313加湿。
125.抽湿器362,配置为能对容纳空间313除湿。
126.湿度检测装置363,用于检测容纳空间313内的当前湿度,并将检测结果反馈给第二控制器。
127.这样,可根据容纳空间313内的当前湿度控制加湿器361和抽湿器362,以调节容纳空间313内的湿度至适合的湿度值,且湿度调控方便、可靠。
128.进一步举例地,第二控制器内存储有计算机程序,第二控制器执行计算机程序时能实现如下步骤:
129.获取当前湿度;
130.判断当前湿度与目标湿度之间的差值关系;
131.若当前湿度大于目标湿度,且当前湿度与目标湿度的差值大于第一预设阈值,控制抽湿器362对容纳空间313除湿;
132.若当前湿度与目标湿度之间的差值小于等于第一预设阈值,控制抽湿器362关闭;
133.若当前湿度小于目标湿度,且当前湿度与目标湿度的差值大于第二预设阈值,控制加湿器361对容纳空间313加湿;
134.若当前湿度与目标湿度之间的差值小于等于第二预设阈值,控制加湿器361关闭。
135.这样可以高效地控制容纳空间313内的湿度至目标湿度值的附近,实现容纳空间313的湿度调控,并且可以有效地包容湿度检测装置363对容纳空间313内湿度变化检测的时间偏差,避免加湿器361或抽湿器362被频繁启动的问题,保障湿度调节装置360的寿命。
136.可以理解的是,第二控制器和第一控制器可以集成地设置为同一部件,当然,也可以为分体的两个部件。
137.在某些实施例中,内窥镜存储装置300还包括第一显示装置,第一显示装置用于显示内窥镜信息,其中,内窥镜信息包括以下至少一种:容纳空间313内的内窥镜数量、容纳空间313内的内窥镜种类、容纳空间313内的当前温度、容纳空间313内的当前湿度、手术室在预设时间内(例如第二天)内窥镜的数量需求、手术室在预设时间内(例如第二天)内窥镜的种类需求。通过数字化的手段提高了内窥镜库存管理效率。
138.具体例如,第一显示装置设置在箱体310或箱体310的门体312上,以作为内窥镜存储装置300的一部分。
139.进一步地,第一显示装置还用于显示第一用户图形交互界面,并获取相应的第一
操作指令,第一操作指令用于控制内窥镜存储装置300。例如,第一操作指令包括温度设定、湿度设定、手术预约设定、取件指令和补充指令中的一个或多个。
140.当然,本方案并不局限于此,在其他实施例中,也可以利用内窥镜系统200的显示装置(可以参照第二显示装置c221和/或第二显示装置d222进行理解)来替代第一显示装置用于对内窥镜信息和/或第一用户图形交互界面进行显示。
141.在某些实施例中,内窥镜系统200包括至少一个医疗设备210和至少一个第二显示装置,医疗设备210和第二显示装置分别设置在柜体100上,医疗设备210用于搭载内窥镜进行诊疗,第二显示装置用于显示内窥镜的图像信息。
142.这样,实现内窥镜系统200的医疗设备210和第二显示装置被集成于柜体100上,可以实现医疗设备210与第二显示装置一体化转移和一站式工作,避免了分体结构之间连接线凌乱、连接线相互拉扯等问题。
143.在某些具体实施例中,柜体100上设置有凹槽,第二显示装置能相对于柜体100运动,以被收纳于凹槽内或离开凹槽。这样,在无需使用第二显示装置时,可以将第二显示装置收纳于凹槽内,使得柜体100外观更加整洁、有序,且可以对第二显示装置有效防护。
144.在某些优选实施例中,内窥镜系统200具体包括第二显示装置c221,第二显示装置c221具体用于显示内窥镜获取的影像信息。内窥镜系统200还包括驱动机构和控制机构,驱动机构用于驱动第二显示装置c221运动,控制机构与驱动机构电连接,控制机构用于获取目标对象(目标对象具体可以例如为操作内窥镜进行诊疗的医疗人员的面部)的当前姿态信息,并根据目标对象的当前姿态信息控制驱动机构。通过根据目标对象的当前姿态信息控制驱动机构,可以使第二显示装置c221随目标对象运动而运动,从而与目标对象保持适宜的相对位置关系,便于医疗人员手术过程中观看第二显示装置c221。
145.举例而言,根据目标对象的当前姿态信息控制驱动机构的步骤包括:
146.根据目标对象的当前姿态信息确定姿态变化值;
147.判断姿态变化值是否大于预设值,若是,根据姿态变化值建立运动任务并根据运动任务控制驱动机构,若否,使第二显示装置c221维持当前姿态。这样,当目标对象的姿态变化幅度较细微时,不会引起第二显示装置c221跟随运动,避免第二显示装置c221频繁、细微的运动,保障第二显示装置c221的稳定性。
148.可选地,姿态变化值包括目标对象的姿态变化值,其中,根据目标对象的当前姿态信息确定姿态变化值的步骤包括:根据目标对象的当前姿态信息和目标对象的历史姿态信息确定目标对象的姿态变化值。
149.可选地,姿态变化值包括第二显示装置c221的姿态变化值,其中,根据目标对象的当前姿态信息确定姿态变化值的步骤包括:根据目标对象的当前姿态信息确定第二显示装置c221目标姿态信息,以及根据第二显示装置c221目标姿态信息和第二显示装置c221当前姿态信息确定第二显示装置c221的姿态变化值。
150.进一步举例而言,根据姿态变化值建立运动任务并根据运动任务控制驱动机构的步骤包括:
151.根据姿态变化值进行路线规划生成一个或多个路线方案;
152.确定最佳路线方案;
153.根据最佳路线方案控制驱动机构。
154.这样可以实现第二显示装置c221的运动路线优选化,如此可以相应提升第二显示装置c221跟随运动的灵敏性,使之与目标对象的运动更契合,这样,目标对象对第二显示装置c221的观看体验更好。
155.可选地,路线方案携带有与路径方案关联的参照参数,其中,参照参数包括时间参数、行程参数、转动角度参数、转动次数参数中的至少一种;确定最佳路线方案具体包括:根据参照参数确定最佳路线方案。这样可以实现第二显示装置c221运动时间最短化或行程最短化或转动角度最小化或转动次数最少化的自动优化选择,第二显示装置c221的跟随运动更流畅,与目标对象的运动也更契合,这样,目标对象对第二显示装置c221的观看体验更好。
156.可选地,确定最佳路线方案包括:获取选择指令,根据选择指令确定最佳路线方案。这样可以实现第二显示装置c221跟随运动的个性化,可以更好地满足不同使用者的个性化需求。
157.可选地,确定最佳路线方案包括:获取目标对象的历史姿态信息,根据历史姿态信息生成目标对象的运动习惯,根据运动习惯与路线方案的匹配度确定最佳路线方案。这样可以实现第二显示装置c221跟随运动的自动个性化、自动定制化,第二显示装置c221的运动更契合目标对象的使用习惯,目标对象对第二显示装置c221的观看体验更好。
158.在某些实施例中,系统搭载结构包括臂架,臂架的一端与柜体100连接,另一端与第二显示装置c221连接,臂架能变形或折叠使得第二显示装置c221能运动。如此,第二显示装置c221的运动范围更广,可以满足更丰富的使用场景。
159.更具体地,臂架包括多个连接臂,相邻两个连接臂连接,第二显示装置c221连接于末端的连接臂,驱动机构配置为能驱动多个连接臂运动,以通过连接臂的运动带动第二显示装置c221运动。
160.详细举例地,多个连接臂中的一个或多个为目标连接臂,路线方案携带有与目标连接臂对应的运动参数,驱动机构根据运动参数驱动相应的目标连接臂运动;
161.其中,基于每个目标连接臂限定有预设空间坐标系,预设空间坐标系具有第一参照平面、第二参照平面及第三参照平面,与目标连接臂对应的运动参数(x
n
,y
n
,z
n
,θ
x
,θ
y
,θ
z
)包括:第一参照平面x内的位移向量x
n
、第二参照平面y内的位移向量y
n
、第三参照平面z内的位移向量z
n
、第一参照平面x内的转动角度向量θ
x
、第二参照平面y内的转动角度向量θ
y
、第三参照平面z内的转动角度向量θ
z
。
162.这样,对第二显示装置c221的姿态控制更精准,可以使第二显示装置c221的姿态与目标对象的姿态契合度控制更精确,更利于目标对象随时观看第二显示装置c221显示的内容。
163.在某些实施例中,控制机构具体用于控制驱动机构,实现如下过程:
164.控制第二显示装置c221至与目标对象第一姿态信息匹配的第一位置,第一位置的姿态信息为第二显示装置c221的姿态信息,其中,第二显示装置c221的第一位置为(x1,y1,z1,θ
x1
,θ
y1
,θ
z1
),目标对象的第一姿态信息的位置为(x2,y2,z2,θ
x2
,θ
y2
,θ
z2
);
165.获取目标对象的第二姿态信息,其中,目标对象的第二姿态信息的位置为(x3,y3,z3,θ
x3
,θ
y3
,θ
z3
);
166.根据目标对象的第一姿态信息的位置(x2,y2,z2,θ
x2
,θ
y2
,θ
z2
)和目标对象的第二姿
态信息的位置(x3,y3,z3,θ
x3
,θ
y3
,θ
z3
)计算得到目标对象的姿态变化值(δx,δy,δz,δθ
x
,δθ
y
,δθ
z
);
167.判断目标对象的姿态变化值(δx,δy,δz,δθ
x
,δθ
y
,δθ
z
)各坐标参数是否超过预设阈值(x0,y0,z0,θ
x0
,θ
y0
,θ
z0
);
168.若任一坐标参数超过预设阈值的相应坐标参数(例如δx大于x0或δy大于y0),则控制第二显示装置c221调整到与目标对象当前姿态信息匹配的第二位置(x4,y4,z4,θ
x4
,θ
y4
,θ
z4
);
169.若每个坐标参数均未超过预设阈值的相应坐标参数,则控制第二显示装置c221维持在第一位置(x1,y1,z1,θ
x1
,θ
y1
,θ
z1
)。
170.本实施例对第二显示装置c221的姿态控制更精准,可以使第二显示装置c221的姿态与目标对象的姿态契合度控制更精确,更利于目标对象随时观看第二显示装置c221显示的内容。
171.当然,本方案并不局限于此,在其他实施例中,也可根据(x2,y2,z2,θ
x2
,θ
y2
,θ
z2
)和(x3,y3,z3,θ
x3
,θ
y3
,θ
z3
)计算空间位移距离或转动角度,预设阈值包括位移阈值或角度阈值,基于计算的位移距离或转动角度与相应的位移阈值或角度阈值大小判断,获得目标对象的姿态变化值是否大于预设阈值的判断结果。
172.在某些实施例中,控制机构还用于:
173.识别第二显示装置c221的预设距离范围内的人脸图像;
174.获取人脸图像的人脸特征信息;
175.将人脸特征信息与数据库特征信息比对获取匹配度信息;
176.根据匹配度信息确定身份信息,或者,根据匹配度信息将符合预设匹配度要求的人脸图像确定为目标对象。
177.这样,通过确定身份或人脸匹配度,控制机构可更准确地锁定目标对象,减少周围其他对象(如护士等)的移动对控制机构的识别和判断造成干扰。
178.在某些实施例中,控制机构还用于在根据目标对象的当前姿态信息控制驱动机构的步骤之前:
179.获取手术开始指令;或
180.判断目标对象的姿态变化频率是否低于预设频率,若是,则发出手术开始信号进行响应,若否,则不发出手术开始信号;
181.其中,手术开始指令或手术开始信号用于触发控制机构执行根据目标对象的当前姿态信息控制驱动机构的步骤。
182.这样可以使得控制机构在手术开始之后基于目标对象的当前姿态信息的控制驱动机构,可以减少非手术场合的误动作。
183.在某些实施例中,系统搭载结构还包括形成在柜体100内的设备室130,柜体100设置有与设备室130连通的开口,医疗设备210设置在设备室130内,医疗设备210具有操作面板211,操作面板211位于开口处,操作面板211上设置有接口212,接口212用于连接包括内窥镜400在内的医疗器械,其中,医疗设备210包括机壳及内容物,内容物至少一部分位于机壳内,内容物包括内窥镜冲洗吸引器、图像处理装置、打印机中的一种或多种。这样实现了医疗设备210的内置安装,更利于内窥镜工作站1000外观规整,能够为医疗人员提供更便利
和舒适的操作环境。
184.进一步地,医疗设备210为一体机,具体地,一体机包括机壳以及位于机壳内的部件,举例地,机壳内的部件具体包括气水供应泵、气体供应泵和负压抽吸泵,机壳内形成多个子区域,子区域之间相互隔开,气水供应泵、气体供应泵和负压抽吸泵分开设置并各自分布于相应的子区域内。部件还包括光源线,光源线表面设置屏蔽层或屏蔽管。这样实现了医疗设备210抽水、送气、送水、信号传输等结构的一体集成。满足医疗设备210抽水、送气、送水、信号传输功能的同时,使得医疗设备210数量精简,相应也减少了设备室130数量需求,利于内窥镜工作站1000柜体100内部分区精简化,可利于降低柜体100成本,也利于柜体100减重,从而方便柜体100的移动、转移。
185.在某些实施例中,医疗设备210的操作面板211上设置有第三显示装置,医疗设备210内设置有泵体,泵体包括气水供应泵、气体供应泵和负压抽吸泵中的至少一者,第三显示装置用于显示第二用户图形交互界面,并获取相应的第二操作指令,第二操作指令用于控制泵体。这样,通过第三显示装置对气水供应泵、气体供应泵和负压抽吸泵无级调节,操作更简单方便,且利于操作面板211结构简化,产品外观更简约。
186.在某些实施例中,医疗设备210的图像处理装置与第二显示装置电连接,图像处理装置配置为获取来自内窥镜的图像信息,并对来自内窥镜的图像信息进行处理,以及将处理后内窥镜的图像信息反馈给第二显示装置,第二显示装置具体用于显示经由图像处理装置处理后内窥镜的图像信息。
187.在某些实施例中,柜体100具有第一侧面、第二侧面和第三侧面,第一侧面与第二侧面之间形成转角过渡,第三侧面与第一侧面位于柜体100相对的两侧。
188.举例而言,请参见图1所示,图1为一实施例所述内窥镜工作站1000的主视结构示意图,该主视结构示意图具体示出了柜体100的第一侧面。
189.请参见图2所示,图2为一实施例所述内窥镜工作站1000的后视结构示意图,该后视结构示意图具体示出了柜体100的第三侧面。
190.请参见图3所示,图3为一实施例所述内窥镜工作站1000的左视结构示意图,该左视结构示意图具体示出了柜体100的第二侧面。
191.请参见图4所示,图4为一实施例所述内窥镜工作站1000的右视结构示意图,该右视结构示意图具体示出了柜体100的第四侧面。
192.其中,如图1所示,第一侧面设置有第二显示装置d222、箱体310的门体312和医疗设备210的操作面板211。第三侧面设置有第二显示装置c221,当然,在其他实施例中,第二显示装置c221也可选择设置在第二侧面。
193.第一侧面上的第二显示装置d222与操作面板211上下排列设置,箱体310的门体312与第一侧面上的第二显示装置d222及操作面板211左右排列设置。第一侧面还设置有物品放置结构140,物品放置结构140可具体为储物格间,当然,也可以为抽屉。
194.第一侧面上的第二显示装置d222还用于显示内窥镜信息以替代第一显示装置,其中,内窥镜信息包括以下至少一种:容纳空间313内的内窥镜数量、容纳空间313内的内窥镜种类、容纳空间313内的当前温度、容纳空间313内的当前湿度、手术室在预设时间内内窥镜的数量需求、手术室在预设时间内内窥镜的种类需求。
195.柜体100设置有镜架120,镜架120位于第一侧面与第二侧面之间的转角过渡处,镜
架120用于与内窥镜400配合以临时固定内窥镜400。
196.第四侧面与第二侧面设于柜体100相对的两侧,其中,第四侧面上设置电源口170,用于供内窥镜工作站1000连接电源。
197.图5示意出了柜体100的顶面,图6示意出的柜体100的底面,底面设置四个滚轮和两个用于锁定滚轮的锁定结构160。
198.内窥镜系统200的医疗设备210及内窥镜存储装置300集成于柜体100内,内窥镜系统200的第二显示装置d222和第二显示装置c221位于柜体100表面,并形成与柜体100侧面大致契合的表面结构,使得整个柜体100呈现为较为大致规则的矩形体,需要进行内窥镜手术时,将柜体100一体转移至相应的手术室中使用即可,使用简单、方便。
199.本技术的一个实施例提供了一种柜体100,用于内窥镜的工作站1000,柜体100设置有系统搭载结构和内窥镜存储装置300;内窥镜存储装置300包括容纳空间313和杀菌装置,容纳空间313用于容纳内窥镜400,杀菌装置配置为能对容纳空间313内杀菌;系统搭载结构用于装载内窥镜系统200。
200.在本技术中,柜体100设置有系统搭载结构用于搭载内窥镜系统200,且柜体100设置有内窥镜存储装置300,内窥镜存储装置300用于存储内窥镜400并能实现对存储的内窥镜400进行杀菌,可以为内窥镜手术提供一站式服务,使用灵活性更好,且通过集成内窥镜400存储杀菌功能,可以保障医院相应科室在一段时间内的内窥镜400自助供给,从而免于临时需要、临时预购、临时派单的繁琐工作,节省社会资源,也提升了工作的高效性。
201.可以理解的是,本技术实施例的柜体100的部分特征或全部特征被披露于任一内窥镜的工作站1000的实施例中,本领域技术人员可以参照任一内窥镜的工作站1000的实施例的内容进行理解,在此不再重复。
202.本技术还提出一种内窥镜存储装置300,用于内窥镜的工作站1000,所述内窥镜存储装置300包括:箱体310,所述箱体310内形成有容纳空间313,所述容纳空间313用于容纳内窥镜400;杀菌装置,配置为能对所述容纳空间313内杀菌;调温系统350,配置为能调节所述容纳空间313内的气体温度;湿度调节装置360,配置为能调节所述容纳空间313内的湿度。
203.在本技术中,内窥镜存储装置300用于存储内窥镜400并能实现对存储的内窥镜400进行杀菌以及调节湿度和温度,可以保障医院相应科室在一段时间内的内窥镜400自助供给,从而免于临时需要、临时预购、临时派单的繁琐工作,节省社会资源,也提升了工作的高效性。
204.可以理解的是,本技术实施例的内窥镜的存储装置的部分特征或全部特征被披露于任一内窥镜的工作站1000的实施例中,本领域技术人员可以参照任一内窥镜的工作站1000的实施例的内容进行理解,在此不再重复。
205.虽然已参照几个典型实施方式描述了本技术,但应当理解,所用的术语是说明和示例性、而非限制性的术语。由于本技术能够以多种形式具体实施而不脱离发明的精神或实质,所以应当理解,上述实施方式不限于任何前述的细节,而应在随附权利要求所限定的精神和范围内广泛地解释,因此落入权利要求或其等效范围内的全部变化和改型都应为随附权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。