1.本实用新型涉及一种机器人,具体是一种机器人的指力反馈机械手及其医院临床辅助机器人。
背景技术:
2.部分特殊场所往往不建议人员逗留或频繁进出,如:重症监护室(icu),隔离病房等,为了避免病人受到外界影响、以及尽量降低医护人员的感染风险,因此需要减少医护人员与病人的接触,但重症监护室、隔离病房等内部往往配备多种医疗器械以对病人进行生命体征检测和辅助急救等,而这些医疗器械又需要医护人员进行操作,这就一定程度上增加了医护人员与病人的接触。为此,有必要设计一种可触发医用设备上的触控键/旋钮键等操控键的机器人,且为了防止作用力过大而损坏医用设备上的操控键,用于触碰操控键的机械手则需要具备力反馈功能。
技术实现要素:
3.本实用新型的目的在于克服上述现有技术存在的不足,而提供一种机器人的指力反馈机械手及其医院临床辅助机器人,本机械手能向系统反馈作用于操控键的指力,以便对操控键实施有效控制。
4.本实用新型的目的是这样实现的:
5.一种机器人的指力反馈机械手,包括伸缩手指和/或夹紧手指;所述伸缩手指包括用于触发触控键的触控部、以及用于检测触控部按压作用力的伸缩力反馈模块,触控部往复活动设置;所述夹紧手指包括用于夹持旋钮键的夹紧块、以及用于检测夹紧块作用旋钮键旋转角度的横向驼机,夹紧块往复横向转动设置;所述伸缩力反馈模块和/或横向驼机通讯连接机械手控制系统,机械手控制系统读取伸缩力反馈模块和/或横向驼机的检测数据。
6.所述伸缩手指还包括伸缩缸体和伸缩杆体,伸缩杆体可伸缩活动的设置于伸缩缸体上,由伸缩缸体和伸缩杆体组成的伸缩气缸受机械手控制系统控制;所述触控部设置于伸缩杆体端部,触控部随伸缩杆体往复活动;所述伸缩力反馈模块设置于伸缩杆体与触控部之间。
7.所述夹紧手指还包括夹紧动力组件,两块以上夹紧块设置于夹紧动力组件的动力输出端,以驱动两块以上夹紧块往复活动进而达到夹紧或松开旋钮键的效果,夹紧动力组件受机械手控制系统控制;所述横向驼机的检测端连接夹紧动力组件,以通过夹紧动力组件检测夹紧块作用旋钮键的旋转角度。
8.所述夹紧手指还包括用于检测夹紧块作用于旋钮键上的夹紧力的夹紧力反馈模块;所述夹紧力反馈模块设置于夹紧块与夹紧动力组件之间,夹紧力反馈模块通讯连接机械手控制系统。
9.两块以上夹紧块之间的夹紧中心线与横向驼机检测端的检测中心线彼此同轴配合。
10.所述指力反馈机械手还包括用于装配伸缩手指和/或夹紧手指的主体支架;当所述伸缩手指装配于主体支架上时,所述主体支架上设有用于装配伸缩手指的第一安装部;当所述夹紧手指装配于主体支架上时,所述主体支架上设有第一定位块和第二定位块,夹紧手指安装于第一定位块与第二定位块之间的间隙上;所述横向驼机设置于主体支架上。
11.所述指力反馈机械手还包括用于检测主体支架纵向转动角度的纵向驼机,纵向驼机通讯连接机械手控制系统;所述横向驼机的机体连接纵向驼机的机体,纵向驼机的检测端连接机械臂。
12.所述指力反馈机械手还包括用于获取伸缩手指和/或夹紧手指前方影像信息的深度相机,深度相机通讯连接机械手控制系统。
13.一种医院临床辅助机器人,包括机器人本体、以及上述的指力反馈机械手;所述机器人本体通过机械臂连接所述指力反馈机械手。
14.所述机械臂一端活动连接机器人本体,机械臂另一端活动连接所述指力反馈机械手,机械臂具有一定活动度。
15.本实用新型的有益效果如下:
16.通过在伸缩手指上设置伸缩力反馈模块,使伸缩手指作用于触控键的指力可由伸缩力反馈模块检测;和/或,通过设置横向驼机并根据其电流,使夹紧手指作用旋钮键的旋转角度可由横向驼机检测;伸缩力反馈模块和/或横向驼机检测到的数据反馈至机械手控制系统, 机械手控制系统只需读取相关数据即可进行实时检测并进行应对工作,以有效触发操控键;此外,还可通过夹紧力反馈模块检测夹紧手指作用于旋钮键的夹紧力,有效避免夹紧力过大而损坏旋钮键,通过根据纵向舵机的电流检测指力反馈机械手的纵向转向,结合横向驼机的数据可精准控制伸缩手指和/或夹紧手指与相应的操控键对应,便于准确触发所需的操控键。
附图说明
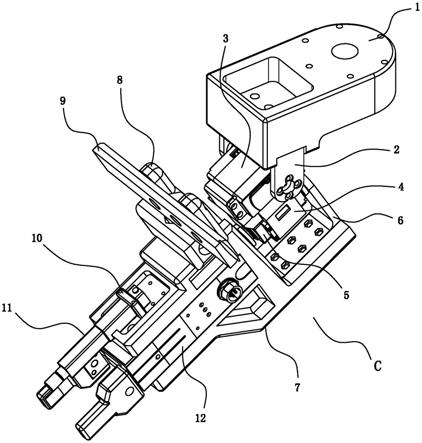
17.图1为本实用新型一实施例中指力反馈机械手的结构示意图。
18.图2为本实用新型一实施例中指力反馈机械手的爆炸图。
19.图3为本实用新型一实施例中指力反馈机械手调整至伸缩手指与触控键对应时的侧视图。
20.图4为本实用新型一实施例中伸缩手指按压触控键的结构示意图。
21.图5为本实用新型一实施例中指力反馈机械手调整至夹紧手指与旋钮键对应时的立体图。
22.图6为本实用新型一实施例中夹紧手指转动旋钮键的结构示意图。
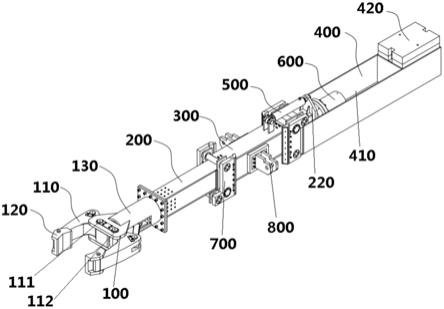
23.图7为本实用新型一实施例中医院临床辅助机器人的结构示意图。
具体实施方式
24.下面结合附图及实施例对本实用新型作进一步描述。
25.参见图1
‑
图6,本实施例涉及的指力反馈机械手c,包括伸缩手指11和夹紧手指12;伸缩手指11包括用于触发触控键13的触控部1103、以及用于检测触控部1103按压作用力的伸缩力反馈模块(图中未示出),触控部1103往复活动设置,触控键13为机械式的按键或触
屏式的触摸键,触控键13设置于控制面板15上;夹紧手指12包括用于夹持旋钮键14的夹紧块1202、以及用于检测夹紧块1202作用旋钮键14旋转角度的横向驼机5,夹紧块1202往复横向转动设置;伸缩力反馈模块和横向驼机5分别通讯连接机械手控制系统,机械手控制系统分别读取伸缩力反馈模块和横向驼机5的检测数据。本指力反馈机械手c通过在伸缩手指11上设置伸缩力反馈模块,使伸缩手指11作用于触控键13的指力可由伸缩力反馈模块检测;通过设置横向驼机5并根据其电流,使夹紧手指12作用旋钮键14的旋转角度可由横向驼机5检测;伸缩力反馈模块和横向驼机5检测到的数据分别反馈至机械手控制系统, 机械手控制系统只需读取相关数据即可进行实时检测并进行应对工作,以有效触发相应的操控键。
26.进一步地,伸缩手指11还包括伸缩缸体1101和伸缩杆体1102,伸缩杆体1102可伸缩活动的设置于伸缩缸体1101中,由伸缩缸体1101和伸缩杆体1102组成的伸缩气缸受机械手控制系统控制;触控部1103设置于伸缩杆体1102端部,触控部1103随伸缩杆体1102往复活动,以由伸缩杆体1102驱动触控部1103活动并使其触发触控键13;伸缩力反馈模块设置于伸缩杆体1102与触控部1103之间。
27.进一步地,夹紧手指12还包括夹紧动力组件1201,夹紧动力组件1201可以是活塞气缸驱动或电机驱动等,两块以上(本实施例设置两块)夹紧块1202设置于夹紧动力组件1201的动力输出端,以驱动两块以上夹紧块1202往复靠拢或远离活动进而达到夹紧或松开旋钮键14的效果,夹紧动力组件1201受机械手控制系统控制;横向驼机5的检测端连接夹紧动力组件1201,以通过夹紧动力组件1201检测夹紧块1202作用旋钮键14的旋转角度。
28.进一步地,夹紧手指12还包括用于检测夹紧块1202作用于旋钮键14上的夹紧力的夹紧力反馈模块(图中未示出);夹紧力反馈模块设置于夹紧块1202与夹紧动力组件1201之间,夹紧力反馈模块通讯连接机械手控制系统;通过夹紧力反馈模块检测夹紧手指12作用于旋钮键14的夹紧力,有效避免夹紧力过大而损坏旋钮键14。
29.进一步地,参见图3,两块以上夹紧块1202之间的夹紧中心线d1与横向驼机5检测端的检测中心线d2彼此同轴配合,以准确检测夹紧块1202作用旋钮键14的旋转角度。
30.进一步地,指力反馈机械手c还包括用于装配伸缩手指11和夹紧手指12的主体支架7;主体支架7上设有用于装配伸缩手指11的第一安装部701、以及第一定位块702和第二定位块703,夹紧手指12安装于第一定位块702与第二定位块703之间的间隙内,第一安装部701设置于第一定位块702上,伸缩手指11通过第一固定座10固定设置于第一安装部701上;主体支架7上设有第二安装部704,第二安装部704固定装配有横向转动板6,横向驼机5的检测端连接横向转动板6,以使横向驼机5设置于主体支架7上。
31.进一步地,指力反馈机械手c还包括用于检测主体支架7纵向转动角度的纵向驼机3,纵向驼机3通讯连接机械手控制系统;横向驼机5与纵向驼机3之间设置有驼机支架4,横向驼机5的机体通过驼机支架4固定连接纵向驼机3的机体,纵向驼机3的检测端连接纵向转动板2,纵向转动板2固定连接转轴连接件1,转轴连接件1连接机器人上的机械臂b,以使纵向驼机3的检测端连接机械臂b,机械手控制系统结合横向驼机和纵向驼机的电流可有效控制机械手活动至指定位置触发操控键。
32.进一步地,指力反馈机械手c还包括用于获取伸缩手指11和夹紧手指12前方影像信息的深度相机9,以矫正伸缩手指11和夹紧手指12是否对准需要触发的操控键,深度相机9通讯连接机械手控制系统,深度相机9通过第二固定座8固定装配于主体支架7的第三安装
部705上。
33.本实施例涉及的医院临床辅助机器人,包括机器人本体a、以及上述的指力反馈机械手c;机器人本体a通过机械臂b连接指力反馈机械手c。
34.进一步地,机械臂b一端活动连接机器人本体a,机械臂b另一端活动连接指力反馈机械手c,机械臂b具有一定活动度。
35.上述为本实用新型的优选方案,显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本领域的技术人员应该了解本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等同物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。