1.本实用新型涉及机械设备技术领域,具体而言,涉及一种重型搬运机械手。
背景技术:
2.随着科技生产力的不断提升,传统的人工操作模式,慢慢被自动化设备所替代,在国家对科技企业及大型工厂的不断扶持和各种优惠政策的刺激下,自动化工厂慢慢在全国各企业普及,传统的企业开始转型升级。在重工行业,自动化的实现不但提高生产效率,更降低的事故的发生率。要实现自动化生产线,就要解决各工位间工件的流转和上下料问题,对应大型、重型工件,目前普遍使用行车、rgv小车、agv小车。但行车需要人工操作,工件吊装时受:吊具、操作高度、吊运距离、放料精度等影响;rgv小车则受:地轨施工及占地、工件重心、定位精度、升降行程、放料方式等影响;agv小车则受:升降高度、工件尺寸、电池能量、以及自身的重复定位精度等影响。为解决上述问题,故申请人提出本实用新型。
技术实现要素:
3.本实用新型公开了一种重型搬运机械手,旨在提供工件兼容性高,效率高,自动化程度高的重型工件搬运设备,降低现场人工行车吊装的难度,以及降低吊运过程中工件晃动对操作者的安全隐患,提高工作效率,和实现工件的自动化生产。
4.本实用新型采用了如下方案:
5.一种重型搬运机械手,行走于地面上的有轨轨道上,包括:
6.基座,与有轨轨道相配合以带动机械手进行往复移动;
7.立柱,固定地配置于所述基座上;
8.旋转组件,可转动地配置于所述立柱上;
9.夹紧机构,包括配置于所述旋转组件上与所述立柱垂直设置且随所述旋转组件旋转而转动的机架,沿所述机架一侧间隔设置的第一夹紧机构和第二夹紧机构,所述第一夹紧机构和第二夹紧机构能分别沿所述机架上下移动和左右滑动,所述第一夹紧机构和第二夹紧机构上分别设置有第一夹取头和第二夹取头。
10.作为进一步的改进,所述机架以所述立柱轴线为支点,所述机架的前端长于后端的长度,所述机架前端和后端中间为镂空状,呈回字型结构,第一夹紧机构和第二夹紧机构设于所述机架前端上,所述机架后端上设置有配重块,所述第一夹紧机构、第二夹紧机构和配重块可滑动装设于所述机架上。
11.作为进一步的改进,所述第一夹紧机构还包括第一滑动座、第一移动座和第一驱动机构,所述第一滑动座与所述机架滑动配合,所述第一移动座和第一滑动座通过第一连接装置相对配合以使所述第一移动座在所述第一驱动机构的驱动下能沿所述第一滑动座上下移动,所述第一夹取头固定在所述第一移动座上;
12.所述第二夹紧机构还包括第二滑动座、第二移动座和第二驱动机构,所述第二滑动座与所述机架滑动配合,所述第二移动座和第二滑动座通过第二连接装置相对配合以使
所述第二移动座在所述驱动机构的驱动下能沿所述第二滑动座上下移动,所述第二夹取头固定在所述第二移动座上。
13.作为进一步的改进,所述第一滑动座包括与机架配合滑动的第一滑板和配置在所述第一滑板上的第一滑动件和第二滑动件,所述第一滑板一侧设有开口,所述第一滑动件和所述第二滑动件通过所述开口滑动固定在所述第一滑板两侧且两者之间形成能容纳所述第一移动座的安装空间,所述第一滑动件和第二滑动件分置所述第一滑板上下两侧且上下两侧对称设置有至少两个滑槽,所述第一移动座上设有与所述滑槽相配合的滑杆,设有所述滑杆的两侧面中间内凹形成用于容纳所述第一连接装置的第一安装腔;
14.所述第二滑动座包括与机架配合滑动的第二滑板和配置在所述第二滑板上的第三滑动件和第四滑动件,所述第二滑板一侧设有开口,所述第三滑动件和所述第四滑动件通过所述开口滑动固定在所述第二滑板两侧且两者之间形成能容纳所述第二移动座的安装空间,所述第三滑动件和第四滑动件分置所述第二滑板上下两侧且上下两侧对称设置有至少两个滑槽,所述第二移动座上设有与所述滑槽相配合的滑杆,设有所述滑杆的两侧面中间内凹形成用于容纳所述第二连接装置的第二安装腔。
15.作为进一步的改进,所述机架上设有直线齿条,所述第一滑动座和第二滑动座上设有第一滑动电机和第二滑动电机,所述第一滑动电机和第二滑动电机上设有与齿条相配合的第一驱动齿轮和第二驱动齿轮以带动所述第一滑动座和第二滑动座滑动;
16.所述第一连接装置和第二连接装置为螺旋丝杆连接,通过第一驱动机构和第二驱动机构驱动所述螺旋丝杆转动以使所述第一移动座和第二移动座相对所述第一滑动座和第二滑动座滑动上下移动。
17.作为进一步的改进,所述第一移动座和第二移动座上还设有用于限制所述第一移动座和第二移动座向下移动位置的第一限位部和第二限位部。
18.作为进一步的改进,所述机架上设有三角拉梁结构,所述三角拉梁结构由两组固定连接机架上方两侧的三角拉梁和中间采用连接梁对接而成,所述三角拉梁结构的三角形截面上的两点为所述机架的两端点,另一点处于所述立柱轴线的延长线上。
19.作为进一步的改进,所述立柱上端设有一凸出圆盘,所述夹紧机构后端一侧在所述圆盘周圈处设置有与所述圆盘配合用于防止所述机架倾覆的安全机构,所述安全机构呈“丁”字型。
20.作为进一步的改进,所述第一夹取头包括与所述第一移动座固定连接的第一底座、配置在所述第一底座上的第一对中机构和通过所述第一对中机构可相对滑动地配置在所述第一底座上的一对第一夹紧头,所述第一夹紧头包括浮动电永磁性组件和第一吊装直轴,所述浮动电永磁性组件和第一吊装直轴错位设置且所述浮动电永磁性组件底面低于第一吊装直轴;
21.所述第二夹取头包括与所述第二移动座固定连接的第二底座、配置在所述第二底座上的第二对中机构和通过所述第二对中机构可相对滑动地配置在所述第二底座上的一对第二夹紧头,所述第二夹紧头包括第二吊装直轴,所述第二吊装直轴通过第二对中机构滑动对待加工工件对中夹紧。
22.作为进一步的改进,所述电永磁铁组件包括有导向杆、弹簧和电磁铁,所述导向杆固定在所述第一底座上,所述电磁铁可滑动连接在所述导向杆的端部上,所述弹簧套接在
所述导向杆上且抵接所述电磁铁。
23.通过采用上述技术方案,本实用新型可以取得以下技术效果:
24.1、本实用新型的机械手通过旋转组件进行360
°
的旋转和轨道往复移动的配合来实现工件前后左右的搬运,并且通过第一夹紧机构和第二夹紧机构能单独或同步夹持以实现不同工件的搬运吊装。而且机械手上设置有安全机构防止在重型搬运功能中机械手的倾覆,保证搬运过程的安全。
25.2、本实用新型通过从下到上或滑动安装第一夹紧机构和第二夹紧机构,可以避免因为厂房高度的限制,无法从上往下吊装的问题,而且通过三角拉梁结构能够利用三角形的稳定性,在机架前端较长时,能够保证的足够强度、减低挠度和变形量,而且后端设有配重块,调节整个机架吊装的平衡,从而增加机架吊装的旋转半径。
附图说明
26.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
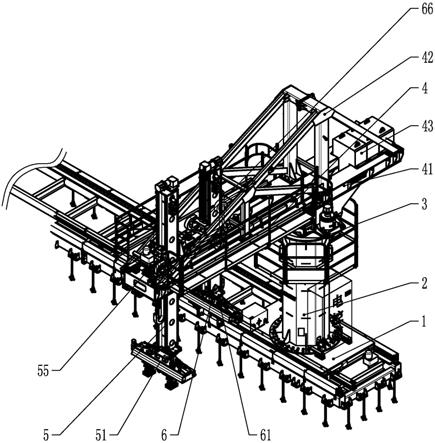
27.图1是本实用新型的结构示意图;
28.图2是本实用新型的分解结构示意图;
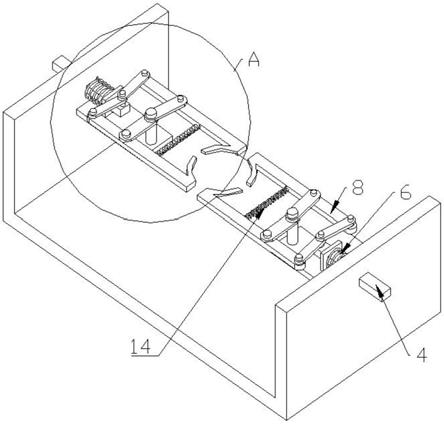
29.图3是图1中a
‑
a的剖视结构示意图;
30.图4是本实用新型夹紧机构的结构示意图;
31.图5是本实用新型的对称剖视结构示意图;
32.图6是本实用新型夹紧机构的分解结构示意图;
33.图7是本实用新型第一夹取头的结构示意图;
34.图8是本实用新型第二夹取头的结构示意图;
35.图标:1
‑
基座;2
‑
立柱;3
‑
旋转组件;4
‑
夹紧机构;5
‑
第一夹紧机构;6
‑
第二夹紧机构;7
‑
直线齿条;21
‑
凸出圆盘;31
‑
齿轮;32
‑
驱动件;41
‑
机架;42
‑
三角拉梁结构;43
‑
配重块;44
‑
安全机构;51
‑
第一夹取头;52
‑
第一滑动座;53
‑
第一移动座;54
‑
第一驱动机构;55
‑
第一滑动电机;56
‑
第一连接装置;57
‑
第一限位部;58
‑
第一防坠机构;61
‑
第二夹取头;62
‑
第二滑动座;63
‑
第二移动座;64
‑
第二驱动机构;65
‑
第二滑动电机;66
‑
第二连接装置;67
‑
第二限位部;68
‑
第二防坠机构;71
‑
驱动齿轮;321
‑
主动齿;511
‑
第一底座;512
‑
第一对中机构;513
‑
第一夹紧头;514
‑
浮动电永磁性组件;515
‑
第一吊装直轴;611
‑
第二底座;612
‑
第二对中机构;613
‑
第二夹紧头;614
‑
第二吊装直轴;5141
‑
导向杆;5142
‑
弹簧;5143
‑
电磁铁;521
‑
第一滑板;621
‑
第二滑板;522
‑
第一滑动件;523
‑
第二滑动件;622
‑
第三滑动件;623
‑
第四滑动件;8
‑
滑槽;81
‑
滑杆;411
‑
前支架;412
‑
后支架。
具体实施方式
36.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用
新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
37.实施例
38.结合图1至图8,本实施例提供了一种重型搬运机械手,行走于地面上的有轨轨道,包括基座1、立柱2、旋转组件3和夹紧机构4。基座1上设有与有轨轨道相配合的工作台,可以带动机械手沿轨道进行往复移动,立柱2通过螺栓连接固定在基座1上。旋转组件3可转动地配置在立柱2上,可带动夹紧机构4进行360
°
的转动,以调整夹紧机构4的位置进行工件夹紧,也能对一些位置进行避让,从而更好地进行工件的搬运。
39.参照图1,夹紧机构4包括配置于旋转组件3上与立柱2垂直设置且随旋转组件3旋转而转动的机架41,沿机架41一侧间隔设置的第一夹紧机构5和第二夹紧机构6,第一夹紧机构5和第二夹紧机构6能分别沿机架41上下移动和左右滑动,第一夹紧机构5和第二夹紧机构6上分别设置有第一夹取头51和第二夹取头61用于夹取工件。当机械手移动到工位时,通过旋转组件3带动夹紧机构4旋转使第一夹取头51或第一夹取头51和第二夹取头61置于工件的上方,然后控制使第一夹紧机构5和第二夹紧机构6滑动至工件重心的正上方,再使第一夹紧机构5和第二夹紧机构6下移以夹紧工件。需要说明的是,第一夹紧机构5和第二夹紧机构6可以根据搬运工件的情况以单独或同步使用来夹紧搬运工件。
40.在本实施例中,机架41以立柱2轴线为支点,设置有夹紧机构4的前端大大长于后端的长度,使机械手有更大使用范围,也能解决后端长度较短在机架41旋转过程中对工位设备的影响,而且在机架41的前端的回转半径内的工位都能使用机械手进行吊装搬运。具体的,机架41前端和后端中间为镂空状,呈回字型结构,机架41前端上设置有第一夹紧机构5和第二夹紧机构6,机架41后端上设置有配重块43,前端用于夹取工件,后端用于调节整个机架41的平衡,防止在重型搬运功能中机械手的倾覆,保证搬运过程的安全。
41.参照图2和图4,第一夹紧机构5还包括第一滑动座52、第一移动座53和第一驱动机构54,第一滑动座52与机架41滑动配合,第一移动座53和第一滑动座52通过第一连接装置56相对配合以使第一移动座53在第一驱动机构54的驱动下能沿第一滑动座52上下移动,第一夹取头51固定在第一移动座53上。具体的,机架41上设有直线齿条7,第一滑动座52上设有第一滑动电机55,第一滑动电机55设有与齿条相配合的第一驱动齿轮71,通过第一滑动电机55控制第一驱动齿轮71正转或者反转以带动第一滑动座52向前或者向后移动,使第一夹取头51能处于工件上方,防止机架41转动时一些位置的干涉。需要说明的是,在直线齿条7的两端会设置有限位柱,以防止第一驱动齿轮71脱离与齿条的啮合位置,导致后续第一滑动座52无法通过第一滑动电机55控制滑动,需要人工进行维修。
42.在本实施例中,第一连接装置56为螺旋丝杆连接,第一根螺旋丝杆固定在第一移动座53上,第二根螺旋丝杆固定在机架41上,通过第一驱动机构54驱动的第一根螺旋丝杆转动,第一移动座53相对第一滑动座52上下移动。同样的,第一移动座53上也设有用于限制所述第一移动座53向下移动位置的第一限位部57,防止第一移动座53下降太多造成第一夹取头51压坏。第一限位部57为第一移动座53向两端延伸的支撑板,也可起到防坠作用,当第
一移动座53下坠时,第一限位部57会卡在机架41上,防止第一移动座53的下坠,从而起到安全保护的作用。
43.参照图6,第一滑动座52包括与机架配合滑动的第一滑板521和配置在第一滑板521上的第一滑动件522和第二滑动件523,第一滑板521一侧设有开口,第一滑动件522和第二滑动件523通过开口滑动固定在第一滑板521两侧且两者之间形成能容纳第一移动座53的安装空间。具体的,当安装第一夹紧机构5时,先将第一滑动件522通过开口滑动至第一滑板521最内侧,然后在安装第一移动座53,最后在安装第二滑动件523,再将第一滑动件522和第二滑动件523固定在第一滑板521上。在本实施例中,第一滑动件522和第二滑动件523分置第一滑板521上下两侧且上下两侧对称设置有两个滑槽8,第一移动座53上设有与滑槽8相配合的滑杆81,通过分置上下两侧的四个滑槽8连接着滑杆81,能增加第一连接座在上下移动的稳定性,解决升降时会晃动的问题。第一移动座53在设有滑杆81的两侧面中间内凹形成用于容纳第一连接装置56的第一安装腔,第一连接装置56通过第一安装腔与第一滑动座52连接,不仅时结构更紧凑也能解决结构庞大时第一滑动座52宽度问题,进而增大第一夹紧机构5的滑动行程。参照图7,在本实施例中,第一夹取头51包括与第一移动座53固定连接的第一底座511、配置在第一底座511上的第一对中机构512和通过第一对中机构512可相对滑动地配置在第一底座511上的一对第一夹紧头513。通过对中机构,能使第一夹紧头513对工件对中夹紧,防止吊装过程中工件的偏心容易造成的脱落。第一夹紧头513包括浮动电永磁性组件514和第一吊装直轴515,浮动电永磁性组件514和第一吊装直轴515错位设置且浮动电永磁性组件514底面低于第一吊装直轴515,保证浮动电永磁性组件514吸附时对大工件表面的绝对接触面积,第一对中机构512可以实现对不同平板类尺寸工件的吸附,及对工件凸起部分的避让。其中电永磁铁组件包括有导向杆5141、弹簧5142和电磁铁5143,导向杆5141固定在第一底座511上,电磁铁5143可滑动连接在导向杆5141的端部上,弹簧5142套接在导向杆5141上且抵接电磁铁5143,电磁铁5143用于吸附工件,弹簧5142使电磁铁5143沿导向杆5141能够有一定的浮动空间,避免在第一移动座53下降过量时,电磁铁5143与工件的过渡挤压,造成工件或者电磁铁5143自身的损伤。第一吊装直轴515能对一些具有孔或吊耳类的工件进行夹紧。
44.第二夹紧机构6还包括第二滑动座62、第二移动座63和第二驱动机构64,第二滑动座62与机架41滑动配合,第二移动座63和第二滑动座62通过第二连接装置66相对配合以使第二移动座63在第二驱动机构64的驱动下能沿第二滑动座62上下移动,第二夹取头61固定在第二移动座63上。具体的,机架41上设有直线齿条7,第二滑动座62上设有第二滑动电机65,第二滑动电机65设有与齿条相配合的第二驱动齿轮,通过第二滑动电机65控制第二驱动齿轮正转或者反转以带动第二滑动座62向前或者向后移动,使第二夹取头61能处于工件上方,防止机架41转动时一些位置的干涉。需要说明的是,在直线齿条7的两端会设置有限位柱,以防止第二驱动齿轮脱离与齿条的啮合位置,导致后续第二滑动座62无法通过第二滑动电机65控制滑动,需要人工进行维修。
45.同样的,在本实施例中,第二连接装置66为螺旋丝杆连接,第一根螺旋丝杆固定在第二移动座63上,第二根螺旋丝杆固定在机架41上,通过第二驱动机构64驱动的第一根螺旋丝杆转动,第二移动座63相对第二滑动座62上下移动。第二移动座63上也设有用于限制所述第二移动座63向下移动位置的第二限位部67,防止第二移动座63下降太多造成第二夹
取头61压坏。第二限位部67为第二移动座63向两端延伸的支撑板,也可起到防坠作用,当第二移动座63下坠时,第二限位部67会卡在机架41上,防止第二移动座63的下坠,从而起到安全保护的作用。
46.参照图6,所述第二滑动座62包括与机架配合滑动的第二滑板621和配置在第二滑板621上的第三滑动件622和第四滑动件623,第二滑板621一侧设有开口,第三滑动件622和第四滑动件623通过开口滑动固定在第二滑板621两侧且两者之间形成能容纳第二移动座63的安装空间。具体的,当安装第二夹紧机构6时,先将第三滑动件622通过开口滑动至第二滑板621最内侧,然后在安装第二移动座63,最后在安装第四滑动件623,再将第三滑动件622和第四滑动件623固定在第二滑板621上。在本实施例中,第三滑动件622和第四滑动件623分置第二滑板621上下两侧且上下两侧对称设置有两个滑槽8,第二移动座63上设有与滑槽8相配合的滑杆81,通过分置上下两侧的四个滑槽8连接着滑杆81,能增加第二移动座63在上下移动的稳定性,解决升降时会晃动的问题。第二移动座63在设有滑杆81的两侧面中间内凹形成用于容纳第二连接装置66的第二安装腔,第二连接装置66通过第二安装腔与第二滑动座62连接,不仅时结构更紧凑也能解决结构庞大时第二滑动座62宽度问题。
47.参照图8,第二夹取头61包括与第二移动座63固定连接的第二底座611、配置在第二底座611上的对中机构和通过第二对中机构612可相对滑动地配置在所述第二底座611上的一对第二夹紧头613,第二夹紧头613包括第二吊装直轴614,第二吊装直轴614通过第二对中机构612滑动对待加工工件对中夹紧。
48.在本实施例中,机架41前端设计成“回”形结构,“回”形结构满足第一夹紧机构5和第二夹紧机构6在内部滑动及升降。并且前端“回”形结构,第一滑板521和第二滑板621可设置成两层,形成一个滑动槽,可以在机架41上滑行,而且左右无联接,为保证强度、减低挠度和减轻重量,将其左右侧截面都设计成“亚”字结构。后部亦设计成“回”形结构,可插入配重块43,调节整个机架41的平衡,以增强后端与前端之间的重量比重,增加安全系数。
49.在本实施例中,由于机架41的高度离地大概6米,而第一夹紧机构5和第二夹紧机构6的长度在5米,在安装时就需要将第一夹紧机构5和第二夹紧机构6最高点吊至高度11米以上,受到一些厂房高度的限制,无法从上往下吊装,可以将机架41前端的前支架411和后端的后支架412可拆卸地配置在机架41上。安装时拆下前支架411和后支架412,第一夹紧机构5、第二夹紧机构6和配重块43滑动进入机架41内后再锁上前支架411和后支架412,从而将第一夹紧机构5和第二夹紧机构6安装于机架41上通过一次性将第一夹紧机构5和第二夹紧机构6先安装后再吊装进机架41,无需吊装后还要进行电机和滑动座的安装,大大提高的安装的安全性。而从下往上安装时,由于驱动第一夹紧机构5和第二夹紧机构6上下移动的第一驱动机构54和第二驱动机构64的电机都比较大,无法直接从机架41中间的“回”形口吊起,而前支架411和后支架412是焊接的,无法拆卸,因此在焊接时预先将第一滑板521和第一滑动件522、第二滑板621和第三滑动件622装设进机架内,再从下往上吊装第一移动座53,将第一移动座53的第一限位部57放置在第一滑板521上,再放置第二滑动件523锁紧在第一滑板521上,滑槽8先安装在滑杆81上,再锁紧在第一滑动件522和第二滑动件523上,最后在安装第一驱动机构54、第一滑动电机55、第一连接装置56和第一夹取头51,完成第一夹紧机构5的安装,为了安全性,在机架41周圈可安装防护装置,以方便人站立安装,也可方便维修。同样的方式安装第二夹紧机构6,在此不再赘述。配重块43则可在机架41上设有螺栓
孔进行紧固。
50.为了防止在搬运过程中机架41可能倾覆,在机架41上设有三角拉梁结构42,三角拉梁结构42由两组固定连接机架上方两侧的三角拉梁和中间采用连接梁对接而成,通过这种对抱式的连接,方便在运输时将其拆分运输,整体组装后的结构,不仅能减重,且有效减少变形。三角拉梁结构42的三角形截面上的两点为机架41的两端点,另一点处于立柱2轴线的延长线上,在三角拉梁结构42的内部还设有支撑梁,依托三角形的稳定性,以加强三角拉梁结构42的强度。可以理解的是,由于夹紧机构4的前端大大长于后端的长度,虽然增大了吊装的活动半径,但也容易导致吊装时机架41向前倾覆,为了吊装安全,在立柱2上端设有一凸出圆盘21,夹紧机构4后端一侧在圆盘周圈处设置有与圆盘配合用于防止机架41倾覆的安全机构44,安全机构44呈“丁”字型。在本实施例中,安全机构44至少设有3个,能够在机架41倾覆通过安全机构44与圆盘的配合,降低机架41直接倾覆的风险,大大提高了安全性能。
51.参照图3和图5,旋转组件3包括可旋转设置在立柱2上的齿轮31组件和驱动齿轮71转动的驱动件32。在本实施例中,驱动件32和齿轮31组件与机架41固定相连,驱动件32上设有与齿轮31组件配合的主动齿321,在需要机架41转动角度时,驱动件32驱动主动齿321转动以带动齿轮31组件转动,从而带动机架41转动。可以理解的是,驱动件32虽然也会随机架41转动,但是主动齿321通过驱动件32实现自转与齿轮31组件啮合带动齿轮31组件的转动,进而带动机架41的转动,因此主动齿321的位置并不会影响齿轮31组件的转动带动机架41的转动。
52.进一步地,第一滑动座52和第二滑动座62上还设有防止坠落的第一防坠机构58和第二防坠机构68,第一防坠机构58和第二防坠机构68纵向横穿机架41,可以防止第一滑动座52和第二滑动座62下坠时,第一防坠机构58和第二防坠机构68能支撑在机架41上,起到多道防坠的安全保障。
53.本实施例中,第一驱动机构54、第一滑动电机55、第二驱动机构64和第二滑动电机65,还有其他未说明的驱动装置,不仅能单独进行驱动,也能通过整个重型搬运机械手的控制系统来实现控制上的同步联动机制,改变传统模式,提升调试人员对设备的操控性。
54.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。