技术特征:
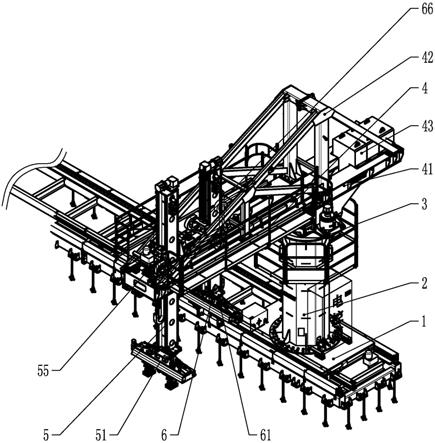
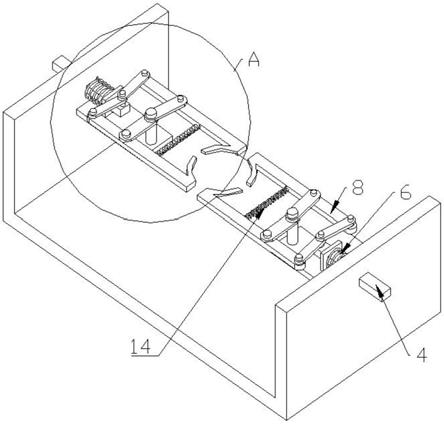
1.一种重型搬运机械手,行走于地面上的有轨轨道上,其特征在于,包括:基座,与有轨轨道相配合以带动机械手进行往复移动;立柱,固定地配置于所述基座上;旋转组件,可转动地配置于所述立柱上;夹紧机构,包括配置于所述旋转组件上与所述立柱垂直设置且随所述旋转组件旋转而转动的机架,沿所述机架一侧间隔设置的第一夹紧机构和第二夹紧机构,所述第一夹紧机构和第二夹紧机构能分别沿所述机架上下移动和左右滑动,所述第一夹紧机构和第二夹紧机构上分别设置有第一夹取头和第二夹取头。2.根据权利要求1所述的重型搬运机械手,其特征在于,所述机架以所述立柱轴线为支点,所述机架的前端长于后端的长度,所述机架前端和后端中间为镂空状,呈回字型结构,第一夹紧机构和第二夹紧机构设于所述机架前端上,所述机架后端上设置有配重块,所述第一夹紧机构、第二夹紧机构和配重块可滑动装设于所述机架上。3.根据权利要求2所述的重型搬运机械手,其特征在于,所述第一夹紧机构还包括第一滑动座、第一移动座和第一驱动机构,所述第一滑动座与所述机架滑动配合,所述第一移动座和第一滑动座通过第一连接装置相对配合以使所述第一移动座在所述第一驱动机构的驱动下能沿所述第一滑动座上下移动,所述第一夹取头固定在所述第一移动座上;所述第二夹紧机构还包括第二滑动座、第二移动座和第二驱动机构,所述第二滑动座与所述机架滑动配合,所述第二移动座和第二滑动座通过第二连接装置相对配合以使所述第二移动座在所述驱动机构的驱动下能沿所述第二滑动座上下移动,所述第二夹取头固定在所述第二移动座上。4.根据权利要求3所述的重型搬运机械手,其特征在于,所述第一滑动座包括与机架配合滑动的第一滑板和配置在所述第一滑板上的第一滑动件和第二滑动件,所述第一滑板一侧设有开口,所述第一滑动件和所述第二滑动件通过所述开口滑动固定在所述第一滑板两侧且两者之间形成能容纳所述第一移动座的安装空间,所述第一滑动件和第二滑动件分置所述第一滑板上下两侧且上下两侧对称设置有至少两个滑槽,所述第一移动座上设有与所述滑槽相配合的滑杆,设有所述滑杆的两侧面中间内凹形成用于容纳所述第一连接装置的第一安装腔;所述第二滑动座包括与机架配合滑动的第二滑板和配置在所述第二滑板上的第三滑动件和第四滑动件,所述第二滑板一侧设有开口,所述第三滑动件和所述第四滑动件通过所述开口滑动固定在所述第二滑板两侧且两者之间形成能容纳所述第二移动座的安装空间,所述第三滑动件和第四滑动件分置所述第二滑板上下两侧且上下两侧对称设置有至少两个滑槽,所述第二移动座上设有与所述滑槽相配合的滑杆,设有所述滑杆的两侧面中间内凹形成用于容纳所述第二连接装置的第二安装腔。5.根据权利要求4所述的重型搬运机械手,其特征在于,所述机架上设有直线齿条,所述第一滑动座和第二滑动座上设有第一滑动电机和第二滑动电机,所述第一滑动电机和第二滑动电机上设有与齿条相配合的第一驱动齿轮和第二驱动齿轮以带动所述第一滑动座和第二滑动座滑动;所述第一连接装置和第二连接装置为螺旋丝杆连接,通过第一驱动机构和第二驱动机构驱动所述螺旋丝杆转动以使所述第一移动座和第二移动座相对所述第一滑动座和第二
滑动座滑动上下移动。6.根据权利要求4所述的重型搬运机械手,其特征在于,所述第一移动座和第二移动座上还设有用于限制所述第一移动座和第二移动座向下移动位置的第一限位部和第二限位部。7.根据权利要求2所述的重型搬运机械手,其特征在于,所述机架上设有三角拉梁结构,所述三角拉梁结构由两组固定连接机架上方两侧的三角拉梁和中间采用连接梁对接而成,所述三角拉梁结构的三角形截面上的两点为所述机架的两端点,另一点处于所述立柱轴线的延长线上。8.根据权利要求2所述的重型搬运机械手,其特征在于,所述立柱上端设有一凸出圆盘,所述夹紧机构后端一侧在所述圆盘周圈处设置有与所述圆盘配合用于防止所述机架倾覆的安全机构,所述安全机构呈“丁”字型。9.根据权利要求3所述的重型搬运机械手,其特征在于,所述第一夹取头包括与所述第一移动座固定连接的第一底座、配置在所述第一底座上的第一对中机构和通过所述第一对中机构可相对滑动地配置在所述第一底座上的一对第一夹紧头,所述第一夹紧头包括浮动电永磁性组件和第一吊装直轴,所述浮动电永磁性组件和第一吊装直轴错位设置且所述浮动电永磁性组件底面低于第一吊装直轴;所述第二夹取头包括与所述第二移动座固定连接的第二底座、配置在所述第二底座上的第二对中机构和通过所述第二对中机构可相对滑动地配置在所述第二底座上的一对第二夹紧头,所述第二夹紧头包括第二吊装直轴,所述第二吊装直轴通过第二对中机构滑动对待加工工件对中夹紧。10.根据权利要求9所述的重型搬运机械手,其特征在于,所述电永磁铁组件包括有导向杆、弹簧和电磁铁,所述导向杆固定在所述第一底座上,所述电磁铁可滑动连接在所述导向杆的端部上,所述弹簧套接在所述导向杆上且抵接所述电磁铁。
技术总结
本实用新型提供了一种重型搬运机械手,行走于地面上的有轨轨道上,包括:基座,立柱,旋转组件和夹紧机构,夹紧机构包括配置于所述旋转组件上与所述立柱垂直设置且随所述旋转组件旋转而转动的机架,沿所述机架一侧间隔设置的第一夹紧机构和第二夹紧机构,所述第一夹紧机构和第二夹紧机构能分别沿所述机架上下移动和左右滑动,所述第一夹紧机构和第二夹紧机构上分别设置有第一夹取头和第二夹取头。本实用新型的机械手通过旋转组件进行360
技术研发人员:余协 林杰城 林远镇 廖强 林营 袁燕清 邵亚池
受保护的技术使用者:厦门航天思尔特机器人系统股份公司
技术研发日:2021.01.19
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。