1.本技术涉及起重设备的领域,尤其是涉及一种塔吊用起重臂。
背景技术:
2.塔式起重机简称塔机、塔吊,作业空间大,通常用于房屋建筑施工中物料的垂直和水平输送以及建筑构件的安装。塔式起重机主要由金属结构、工作机构和电气系统三部分组成。起重臂是起重机上的一个重要装置。
3.目前,公告号为cn202415036u的中国专利公开了一种塔吊起重臂,包括臂体,臂体的底部设有导轨,导轨上设有小跑车,小跑车上设有吊钩,小跑车上设有红外线发射器和红外线接收器,小跑车的前后各连接一跟绳索,绳索分别通过位于臂体前、后端的导轮与位于臂体中部的卷筒相连。
4.针对上述中的相关技术,发明人认为:绳索带动小跑车在导轨上往复运动,使吊钩运动至货物对应的位置,红外线发射器照射到货物上并进行放射,反射的红外线被红外线接收器接收,操控员通过电脑计算出塔吊起重臂到货物的距离。然而,工作过程中,起重臂的长度恒定,如果移动范围内存在障碍物,需要对起重机的位置进行调节,起重臂的适用范围小。
技术实现要素:
5.为了实现起重臂的伸缩,扩大适用范围,本技术提供一种塔吊用起重臂。
6.本技术提供的一种塔吊用起重臂采用如下的技术方案:
7.一种塔吊用起重臂,包括起重臂本体,所述起重臂本体包括用于连接在塔吊上的固定臂套、滑移插设在固定臂套内的活动臂体,所述活动臂体的端面上固定连接有滑移在固定臂套内的第一安装板,所述固定臂套的内底壁上固定连接有第二安装板,所述第一安装板和第二安装板之间连接有调节机构,所述调节机构包括两个交叉设置的调节杆、穿设在两个调节杆交叉处的转轴,所述转轴和两个调节杆转动配合,每个所述调节杆的一端滑移连接于第一安装板,每个所述调节杆的另一端滑移连接于第二安装板,所述第二安装板上连接有用于驱动两个调节杆的端部靠近或远离的驱动组件。
8.通过采用上述技术方案,驱动组件驱动调节两个调节杆的端部靠近或远离,从而改变两个交叉设置的调节杆之间的角度,进而调整第一安装板和第二安装板之间的距离,改变了活动臂体在固定臂套内的位置,调整起重臂本体的长度,扩大了适用范围。
9.可选的,所述驱动组件包括转动连接于第二安装板的螺杆、转动套设在螺杆上的运动座,所述螺杆为双向螺纹杆,所述运动座在螺杆旋向相反的螺纹段上均设有一个,所述运动座和螺杆螺纹配合,所述运动座滑移连接于第二安装板,所述运动座和调节杆的端部铰接,所述运动座和调节杆一一对应设置。
10.通过采用上述技术方案,螺杆转动,两个运动座同时滑移,相向或相背运动,运动座联动调节杆的端部,实现了对两个调节杆端部位置的调节。
11.可选的,所述调节机构在第一安装板和第二安装板之间设置有两个,所述驱动组件和调节机构一一对应设置。
12.通过采用上述技术方案,设置两个调节机构,提高了第一安装板滑移过程中稳定性,从而提高了活动臂体在固定臂套内滑移时的稳定性。
13.可选的,所述第一安装板上沿着螺杆的长度方向开有限位槽,所述调节杆靠近第一安装板的端部铰接有滑移在限位槽内的限位块。
14.通过采用上述技术方案,限位槽对限位块进行限位和导向,从而对调节杆的端部进行限位和导向,提高了调节杆端部滑移的稳定性。
15.可选的,所述螺杆的一端从固定臂套内伸出,所述螺杆伸出固定臂套的端部固定套设有从动齿轮,所述固定臂套上连接有驱动电机,所述驱动电机的输出轴上固定套设有与从动齿轮相啮合的主动齿轮。
16.通过采用上述技术方案,驱动电机的输出轴转动,带动主动齿轮转动,主动齿轮联动从动齿轮,对螺杆进行驱动,提高了自动化程度。
17.可选的,两个所述螺杆之间连接有联动组件,所述联动组件包括同步带、固定套设在螺杆上的联动轮,所述联动轮在每个螺杆上均设置有一个,所述同步带绕设在两个联动轮上。
18.通过采用上述技术方案,联动组件联动两个调节机构,一个驱动电机即可实现对两个调节机构的同时驱动,节省了成本。
19.可选的,所述第一安装板和第二安装板之间连接有若干加强杆,所述加强杆的一端连接于第一安装板,所述加强杆的另一端连接于第二安装板,所述加强杆为伸缩杆。
20.通过采用上述技术方案,加强杆为第一安装板的滑移提供导向,提高了活动臂体在固定臂套内滑移时的稳定性,同时,增加了第一安装板和第二安装板之间的相对位置稳定性。
21.可选的,所述加强杆包括固定连接在第二安装板上的加强套、固定连接在第一安装板上的杆体,所述杆体远离第一安装板的端部滑移插设在加强套内。
22.通过采用上述技术方案,杆体在加强套内滑移,加强套对杆体的运动进行导向,从而对第一安装板进行导向。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.驱动组件驱动调节两个调节杆的端部靠近或远离,从而改变两个交叉设置的调节杆之间的角度,进而调整第一安装板和第二安装板之间的距离,改变了活动臂体在固定臂套内的位置,调整;起重臂本体的长度,扩大了适用范围;
25.2.联动组件联动两个调节机构,一个驱动电机即可实现对两个调节机构的同时驱动,节省了成本。
附图说明
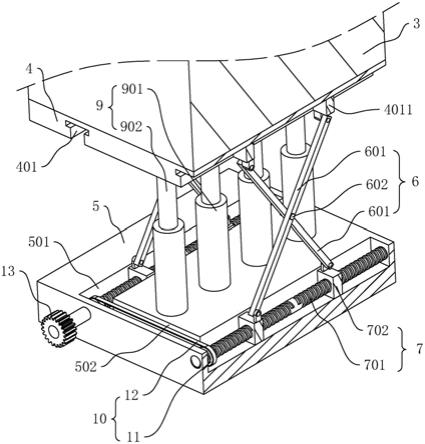
26.图1是本技术实施例的整体结构示意图。
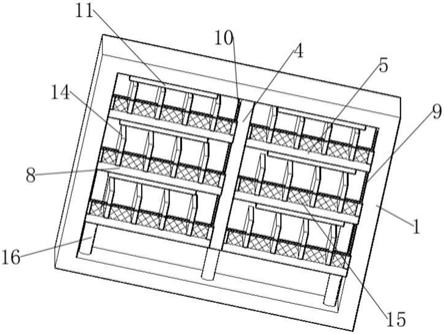
27.图2是本技术实施例的体现调节机构的结构示意图。
28.图3是图2中a部分的放大图。
29.附图标记说明:1、起重臂本体;2、固定臂套;3、活动臂体;4、第一安装板;401、限位
槽;4011、限位块;5、第二安装板;501、容纳槽;502、安装槽;6、调节机构;601、调节杆;602、转轴;7、驱动组件;701、螺杆;702、运动座;9、加强杆;901、加强套;902、杆体;10、联动组件;11、联动轮;12、同步带;13、从动齿轮;14、固定板;1401、驱动电机;15、主动齿轮。
具体实施方式
30.以下结合附图1
‑
3本技术作进一步详细说明。
31.本技术实施例公开一种塔吊用起重臂。参照图1,一种塔吊用起重臂包括起重臂本体1,起重臂本体1包括固定臂套2和活动臂体3,活动臂体3滑移插设在固定臂套2内,固定臂套2远离活动臂体3的端部封闭设置,固定臂套2和活动臂体3的轴线共线。
32.参照图1和图2,活动臂体3插设在固定臂套2的端部固定连接有第一安装板4,固定臂套2的内底壁上固定连接有第二安装板5,第一安装板4和第二安装板5之间连接有调节机构6。
33.通过调节机构6调节第一安装板4和第二安装板5之间的距离,从而调整活动臂体3在固定臂套2内的位置,实现了起重臂本体1的长度调节,扩大了适用范围。
34.参照图1和图2,为了提高活动臂体3滑移时的稳定性,调节机构6关于活动臂体3的中心线对称设置有两个。两个调节机构6的结构相同,下文以一个调节机构6为例进行说明。
35.参照图2,调节机构6包括两个调节杆601、转轴602,两个调节杆601交叉设置,转轴602穿设在两个调节杆601的交叉处。并且,转轴602与两个调节杆601转动配合,转轴602的轴线经过两个调节杆601的交叉点。
36.参照图2,调节杆601的一端滑移连接于第一安装板4,另一端滑移连接于第二安装板5,第二安装板5上连接有驱动组件7。驱动组件7包括螺杆701和运动座702,第二安装板5朝向第一安装板4的侧面上开有容纳槽501,容纳槽501为盲槽。
37.参照图2,螺杆701位于容纳槽501内,且螺杆701的两端均通过轴承转动连接于容纳槽501的槽壁,螺杆701的长度方向和容纳槽501的长度方向同向。运动座702滑移在容纳槽501内,运动座702套设在螺杆701上且与螺杆701螺纹配合。螺杆701为双向螺杆701,运动座702在螺杆701旋向相反的螺纹段上均设有一个。
38.参照图2,调节杆601的靠近第二安装板5的端部铰接于运动座702,铰接点位于运动座702朝向第一安装板4的侧面,运动座702和调节杆601一一对应设置。第一安装板4朝向第二安装板5的侧面上开有限位槽401,限位槽401为t型槽,且限位槽401的长度方向和容纳槽501的长度方向同向。
39.参照图2,限位槽401内滑移有限位块4011,限位块4011为与限位槽401适配的t型块,调节杆601的靠近第一安装板4的端部铰接于限位块4011,铰接点位于限位块4011朝向第二安装板5的侧面。
40.转动螺杆701即可驱动两个运动座702远离或靠近,同时限位块4011在限位槽401内进行滑移,两个交叉设置的调节杆601之间的角度改变,从而调整第一安装板4和第二安装板5之间的距离。
41.参照图2,第一安装板4和第二安装板5之间连接有加强杆9,增强了第一安装板4和第二安装板5之间相对位置的稳定性。同时,加强杆9为伸缩杆,为第一安装板4滑移时提供导向,提高了活动臂体3的稳定性。
42.参照图2,加强杆9包括加强套901和杆体902,加强套901固定连接于第二安装板5朝向第一安装板4的一侧,且垂直于第二安装板5设置。杆体902固定连接于第一安装板4朝向第二安装板5的一侧,且垂直于第一安装板4设置,杆体902远离第一安装板4的端部滑移插设在加强套901内。
43.参照图2,为了对两个调节机构6进行联动,提高操作的便捷性,两个螺杆701之间连接有联动组件10。联动组件10包括联动轮11和同步带12,联动轮11固定套设在螺杆701的端部。联动轮1在每个螺杆701上均设有一个,同步带12绕设在两个联动轮11上,第二安装板5上开有用于容纳同步带12的安装槽502,安装槽502连通于容纳槽501。
44.参照图2和图3,为了便于驱动螺杆701,一根螺杆701的一端从固定臂套2内伸出且固定套设有从动齿轮13。固定臂套2的侧壁上固定连接有固定板14,固定板14背离固定臂套2的一侧通过螺栓连接有驱动电机1401。
45.参照图2和图3,驱动电机1401的输出轴贯穿固定板14,且驱动电机1401的输出轴上固定套设有主动齿轮15。主动齿轮15和从动齿轮13相互啮合,一个电机即可驱动两个调节机构6,节省能源。
46.本技术实施例一种塔吊用起重臂的实施原理为:驱动电机1401的输出轴转动,通过主动齿轮15和从动齿轮13联动螺杆701,驱动套设有从动齿轮13的螺杆701转动,同时,通过联动轮11和同步带12联动另一根螺杆701转动。接着,驱动运动座702在容纳槽501内滑移,限位块4011在限位槽401内进行滑移,两个交叉设置的调节杆601之间的角度改变,从而调整第一安装板4和第二安装板5之间的距离,进而调整了起重臂本体1的长度。
47.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。