基于sumo仿真的v2x环境下的高速公路管控方法
技术领域
1.本发明涉及一种基于sumo仿真的v2x环境下的高速公路管控方法,属于交通管理与控制技术领域。
背景技术:
2.车联网的应用于发展,对于促进我国汽车、交通、通信产业的转型升级,实现科技革命,具有极大的战略意义。然而当前车联网相关技术链存在应用需求不明确、互联互通及数据交换机制不完善等诸多问题。而为了方便研发提升测试效率,通过数字孪生以数字化的虚拟模型构建真实的物理场景便成了一个很有效的方法。而本发明的目标则是研发一款基于sumo仿真平台的v2x环境下多种管控手段相结合的高速公路管控方法。
3.而现有的资料的管控方法多为一种或者两种管控手段相结合的方法,且主要围绕可变限速、匝道控制等手段展开,经过研究者们的检验发现这些管控方法均能取得不错的控制效果,然而如何将这多种宏观的控制方法有机的结合起来仍然是亟需填补的内容。
4.v2x全称vihicle to everything,即车与任何事物相联系的技术环境,主要包括v2v车与车(vehicle),v2i车与基础设施(vechile to infrainstructure),v2p车与人(vehicle to people),v2n车与云(vehicle to network)。未来在此技术环境下,车与外界环境的交互可以在微观层面对车辆的驾驶提出更多的辅助控制的建议,因而考虑以此为核,结合高速公路的基础设施建设原有的多种宏观管控手段,可以实现整个高速公路的系统管控。
技术实现要素:
5.本发明的目的针对上述管控方法的局限性,提出一种基于sumo仿真的v2x环境下的高速公路管控方法。旨在结合v2x环境的特殊性,对车辆进行宏观管控措施、微观车辆控制相结合的高速公路管控方法,并通过指标选择最优的宏观管控策略结合微观层面车辆控制实现管控的宏微观一体化最后通过sumo验证了该方法的控制效果。
6.本发明的上述目的可通过以下技术方案来实现:
7.基于sumo仿真的v2x环境下的高速公路管控方法,该方法包括如下步骤:
8.步骤1:构建仿真所需的路网,具体操作包括在开源地图软件openstreetmap上导入已有的真实路网或在sumo内置的netedit路网编辑器中自行编辑路网;
9.步骤2:构建v2x的车辆仿真环境以及管控微观层面的车辆辅助控制;
10.步骤3:在步骤1和步骤2搭建的环境的基础上结合可变限速、匝道控制、车道车种控制、可变车道的宏观管控手段对高速公路进行总的系统管控。
11.进一步地,步骤2的具体方法包括:
12.步骤21.读取rsu设置距离间隔、rsu数据采集时间间隔参数,生成仿真中定义rsu设备的.det.xml文件,实现仿真环境下路段rsu设备布设,并与兴趣点设置.poi.xml合并,组成仿真采用的外部设置文件.add.xml,在.sumocfg仿真配置文件中实现调用;
13.步骤22.读取流量、仿真时间、v2x智能网联车辆比例、l5无人驾驶车辆比例参数,结合实测流量数据,生成仿真中定义车辆、车流及其路径的.rou.xml文件,在.sumocfg仿真配置文件中实现调用;
14.步骤23.读取感知设备最大感知范围、车
‑
车通讯最大距离以及车
‑
设备通讯最大距离参数,在每个仿真步内,每辆v2x车辆将接收到其感知范围和通讯范围内的交通运行状态信息;
15.步骤24.在每个仿真步内,根据每辆车接收到的信息反馈,根据车辆功能设置,对车辆的运行进行控制,车辆功能模块分为驾驶控制、驾驶建议以及智慧导航,三类功能均可通过参数改写实现开关设置
16.进一步地,步骤3的具体方法包括:
17.步骤31.根据实时路况,以30min为时间间隔δt发起一轮时间步计算;
18.步骤32.记录一个时间步内的实际交通数据,包括车辆总数n、大车数量n、当前时间步车辆的的平均速度avgspeed
b
,下一时间步的车辆平均速度avgspeed
a
,以及当前时间步的车辆总油耗fuelcons
a
,下一时间步的车辆总油耗fuelcons
b
,下一时间步的道路车辆数vehnum
a
,当前步的道路车辆数vehnum
b
,通过线圈获取当前时间步内第i辆车的占用时间t
i
;
19.步骤33.确定大车占车辆总数的阈值k
′
,确定限制大车通行的车道数量及位置,确定可用于拥堵疏散的应急车道位置;
20.步骤34.计算当前道路的评价指标p:
[0021][0022]
步骤35.可变限速管控模块开启,设定初始可变限速值vlim
(0)
,vlim
(0)
∈[80
‑
150km/h],以δv=5km/h为一个单位改变当前限速子区域的限速值为vlim
(1)
=vlim
(0)
±
δv,并在限速条件为vlim
(1)
的情况下对当前限速子区域和下游限速子区域进行下一个时间步的仿真,同样计算在该仿真条件下,以式(1)计算在限速条件下的道路评价指标p1,同理可以计算出vlim
(2)
=vlim
(1)
δv的情况下的道路评价指标p2;
[0023]
步骤36.比较p1与p2,若p1>p2,则vlim=vlim
(1)
,p
v
=p1,反之则vlim=vlim
(2)
,p
v
=p2,然后回归步骤35继续计算,直至搜索出vlim=80~150km/h的最佳限制值vlim;
[0024]
步骤37.车道车种控制模块开启,计算实时大车比数据k=n/n,比较k
′
与k,确定大车行驶车道;
[0025]
步骤38.可变车道模块开启,计算道路的时间占有率r
t
:
[0026][0027]
其中,t
t
为总观测时间,r
t
为道路的占有率,若r
t
>70%,则在下一时间步开放应急车道,反之不开放;
[0028]
步骤39.匝道控制模块开启,根据线圈采集的实时车头时距数据,以10s为时间间隔δt发起一轮计算,按照步骤38中式(2)分别计算出匝道的时间占有率r
tz
以及主路最右两车道的时间占有率r
tm1
和r
tm2
,如果匝道在10s内的占有率r
tz
>r
tm1
且r
tz
>r
tm2
,则匝道有通行权且绿灯开放的持续时间至少为20s至多为90s,反之则匝道没有通行权。
[0029]
有益效果:本发明与现有技术相比,具有以下优点:
[0030]
旨在结合v2x环境的特殊性,对车辆进行宏观管控措施、微观车辆控制相结合的高
速公路管控方法,并通过指标选择最优的宏观管控策略结合微观层面车辆控制实现管控的宏微观一体化最后通过sumo验证了该方法的控制效果。具体不同环境下的管控措施以及播报方式如下表1所示:
[0031]
表1高速公路管控措施及其播报方式
[0032]
[0033]
附图说明
[0034]
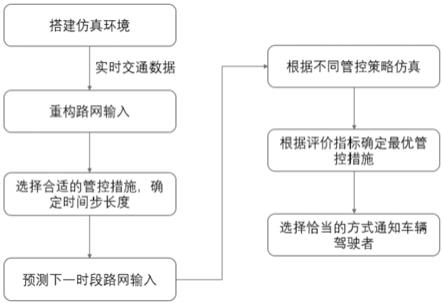
图1是宏观管控流程图。
[0035]
图2是本发明实施例中的实际测试道路场景。
具体实施方式
[0036]
以下结合实施例和说明书附图,详细说明本发明的实施过程。
[0037]
本实施例中的基于sumo仿真的v2x环境下的高速公路管控方法,该方法包括如下步骤:
[0038]
步骤1:通过知名的开源地图数据库openstreetmap导入已有的真实路网或者自己在sumo的netedit软件中搭建自己想要的路网;
[0039]
步骤2:在步骤1的基础上,构建v2x的车辆仿真环境以及管控微观层面的车辆辅助控制,具体由以下几个板块步骤实现:
[0040]
步骤2.1:参数的传入、读取与调用
[0041]
基于用户界面输入,修改.ini参数配置文件,运行代码脚本,生成仿真基础文件,并基于traci实现sumo调用,运行仿真。
[0042]
步骤2.2:仿真文件生成
[0043]
该步骤主要由以下两个部分构成:
[0044]
1)读取rsu设置距离间隔、rsu数据采集时间间隔参数,生成仿真中定义rsu设备的.det.xml文件,实现仿真环境下路段rsu设备布设,并与兴趣点设置.poi.xml合并,组成仿真采用的外部设置文件.add.xml,在.sumocfg仿真配置文件中实现调用。
[0045]
2)读取流量、仿真时间、v2x智能网联车辆比例、l5无人驾驶车辆比例参数,结合实测流量数据,生成仿真中定义车辆、车流及其路径的.rou.xml文件,在.sumocfg仿真配置文件中实现调用。
[0046]
步骤2.3:v2x车辆的仿真以及微观控制
[0047]
对路网中存在的v2x智能网联车辆,对其车辆行为进行如下的定义和控制:
[0048]
1)v2x智能网联车辆的基本运行规则如下:按照预定行驶路线平稳行驶,遵守高速交规,与前车保持一定的安全跟车距离,换道时充分考虑时间节点,保障安全性。
[0049]
2)读取感知设备最大感知范围、车
‑
车通讯最大距离以及车
‑
设备通讯最大距离参数,在每个仿真步内,每辆v2x车辆将接收到其感知范围和通讯范围内的交通运行状态信息。
[0050]
3)在每个仿真步内,根据每辆车接收到的信息反馈,根据车辆功能设置,对车辆的运行进行控制。功能模块主要分为驾驶控制、驾驶建议以及智慧导航,三类功能均可通过参数改写实现开关设置。
[0051]
驾驶控制:在危险驾驶场景下直接控制车辆,避免因驾驶员反应时间带来的安全隐患,保障行车安全性。该模块通过traci获取前方车辆状态(左前方、前方、右前方),当前方车辆急刹或临近车道车辆存在突然换道行为时,驾驶系统将基于状态反馈结果和预设控制算法,代替驾驶员直接减速。
[0052]
驾驶建议:给出行驶操作建议,提升行车效率和安全性。该模块通过驾驶建议遵从率参数实现从建议到驾驶员实际行为的仿真。该模块通过traci获取感知范围内v2x智能网联车辆运行状态信息以及rsu感知信息,当路况良好时将建议车辆加速;当车道前方存在慢速车辆时,驾驶系统将建议驾驶员减速。
[0053]
智慧导航:给出行驶路径建议,提升行车效率和安全性。该模块通过驾驶建议遵从率、管控建议遵从率参数实现从驾驶及管控建议到驾驶员实际行为的仿真。驾驶建议方面,该模块通过traci获取感知范围内v2x智能网联车辆运行状态信息以及rsu感知信息,当前方存在极慢速车辆/静止车辆时,驾驶系统将建议驾驶员换道。管控建议方面,该模块通过traci获取全域rsu感知信息,实现拥堵区段监测,通过rsu将拥堵区段信息反馈至车辆,驾驶系统将根据车辆所在位置预估等待时间,当等待时间超过驾驶员最大忍受限度参数时,驾驶系统将建议驾驶员更换行驶路径。
[0054]
上述步骤2中所用的参数如下表2所示:
[0055]
表2v2x参数
[0056]
参数单位说明rsu设置间隔距离m相邻rsu之间的距离rsu反馈时间粒度minrsu返回路况信息对应的时间范围v2v作用距离mv2x车辆获取其他v2x车辆状态信息的最大距离
时间s仿真时长流量veh/h车流量大小v2x车辆渗透率%车辆中v2x车辆比例无人驾驶车辆渗透率%车辆中无人驾驶车辆比例操作建议遵从率%驾驶员接受辅助驾驶系统给出的驾驶行为建议的比例管控建议遵从率%驾驶员接受管控系统给出的交通管控建议的比例
[0057]
步骤3:多种管控手段相结合的高速公路宏观管控方法
[0058]
步骤3的具体流程是在上述步骤1以及步骤2搭建的仿真环境基础上通过获取的实时的交通数据选择合适的管控措施并确定每一时间步的长度,预测采下一时段的路网输入并进行不同管控条件下的仿真,根据仿真所获得的系统评价指标确定最优的管控策略并选择恰当的方式播报通知车辆驾驶员,具体流程图如下图1所示:
[0059]
步骤3中所采用的具体的管控系统由以下四个模块构成,四个模块在同一高速公路上同时作用构成了一种完整的多种管控手段相结合的管控方法:
[0060]
模块一:可变限速
[0061]
step1:根据实时路况,以30min为时间间隔δt发起一轮时间步计算。
[0062]
step2:根据实际交通数据包括车辆类型、进入卡口时间、瞬时速度等信息,依托sumo平台进行交通仿真,计算当前道路交通指标p,p由下式计算得到:
[0063][0064]
式中,vehnum
a
表示下一时间步的道路车辆数,avgspeed
a
表示下一时间步的车辆平均速度,vehnum
b
表示当前步的道路车辆数,avgspeed
b
表示当前时间步的车辆平均速度,fuelcons
b
表示下一时间步的车辆总油耗,fuelcons
a
表示当前时间步的车辆总油耗,该指标p越大越好。
[0065]
其中vehnum、avgspeed、fuelcons三项参数均可在sumo仿真平台中通过traci读取输出仿真结果数据,具体如下表3所示:
[0066]
表3评价指标中间参数读取结果缩略表
[0067][0068]
注:上表3中车辆平均速度为11条测试路段的车速之和。
[0069]
step3:设定初始可变限速值vlim
(0)
(该值可以为80
‑
150km/h的任意值),以δv=5km/h为一个单位改变当前限速子区域的限速值为vlim
(1)
=vlim
(0)
±
δv,并在限速条件为vlim
(1)
的情况下对当前限速子区域和下游限速子区域进行下一个时间步的仿真,同样计算在该仿真条件下,以式(1)计算在限速条件下的道路评价指标p1,同理可以计算出vlim
(2)
=vlim
(1)
δv的情况下的道路评价指标p2。
[0070]
step4:比较p1与p2,若p1>p2,则vlim=vlim
(1)
,p
v
=p1,反之则vlim=vlim
(2)
,p
v
=p2。然后回归step3继续计算,直至搜索出vlim=80~150km/h的最佳限制值vlim。
[0071]
step5:结合实际高速公路交通状况,判断在可变限速控制条件下获取的最佳限速
值。若vlim<80km/h,则考虑其他管控措施,若vlim>150km/h,则取vlim=150km/h,p
v
记录取值为当vlim=150km/h的情况下的道路评价指标。
[0072]
模块二:车道车种控制
[0073]
step1:记录当前路段车辆总数n与大车数量n。
[0074]
step2:计算实时大车比数据k=n/n,以30min为时间间隔δt发起一轮时间步计算。
[0075]
step3:确定阈值k
′
,确定限制大车通行的车道数量及位置。
[0076]
step4:比较k
′
与k,这里以4车道路段为例,若k<k
′
,则规定大车只能在路段最右侧车道行驶;若k>k
′
则规定大车可以在右侧两车道行驶(最佳阈值可通过sumo仿真预先选择)。
[0077]
模块三:可变车道
[0078]
step1:首先根据道路实际情况,确定可用于拥堵疏散的应急车道。
[0079]
step2:根据实时路况,以30min为时间间隔发起一轮计算。
[0080]
step3:通过线圈获取当前时间步内第i辆车的占用时间t
i
,则道路的时间占有率计算为:
[0081][0082]
其中,r
t
为道路的占有率,t
t
为总观测时间,n为该路段的车辆数。
[0083]
step4:若r
t
>70%,则在下一时间步开放应急车道,反之不开放。
[0084]
模块四:匝道控制
[0085]
step1:根据线圈采集的实时车头时距数据,以10s为时间间隔δt发起一轮计算。
[0086]
step2:按照模块三中公式(2)分别计算出匝道以及主路最右两车道的时间占有率r
tz
、r
tm1
和r
tm2
。如果匝道在10s内的占有率r
tz
>r
tm1
且r
tz
>r
tm2
,则匝道有通行权且绿灯开放的持续时间至少为20s至多为90s,反之则匝道没有通行权。
[0087]
step3:调整匝道信号灯按照step2的指示完成控制。
[0088]
根据已有的卡口数据等信息,在图2所述实际道路场景中进行测试,使用强化学习算法,最终得出的方案对比结果如下表4所示:
[0089]
表4管控方案结果评价表
[0090][0091][0092]
根据上述结果可知,在上述高速公路场景下进行本专利的高速公路管控方法,得出的最佳可变限速值为110km/h,且允许大车在右侧两车道行驶,开放应急车道,仿真计算所需要的时长为40s左右,相比较以30min为一个时间步的管控系统来说,近乎达到了多种管控手段相结合实时控制的水平。
[0093]
以上显示和描述了本发明的基本原理、主要特征和优点。本领域的技术人员应该了解,本发明不受上述具体实施例的限制,上述具体实施例和说明书中的描述只是为了进一步说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护的范围由权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。