1.本发明涉及林业机械技术领域,具体为一种用于市政的道路树枝修剪机器人。
背景技术:
2.道路两旁行道树过于茂盛,导致电线与树枝混在一起、交通标志及路灯被遮挡,形成安全隐患。常见的树木有白杨、银杏、桉树等树木,它们大多树干通直、高大粗壮,通常用作行道树或群植用作绿地风景树。过去修剪这类树木都是通过人工使用高枝锯来进行操作,单人操作难度大,危险性强。树木修剪的作用是:调节树体结构,促进生长平衡,消除树体隐患,恢复树木生机。另外,修剪还可以保持树木的健康生长和良好树形,便于管理和具有更高的观赏价值,防止对人们生命财产的损害,收到艺术上的美学效果。
3.现有的修剪主要借助可移动的升降工具,由多名树枝修剪工人手持切割工具进行修剪。这样修剪树枝对工人的劳动强度较大,效率不高,且工人作业时存在一定的安全隐患,修剪高度较高的树枝难度较大。
技术实现要素:
4.本发明的目的在于提供一种用于市政的道路树枝修剪机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种用于市政的道路树枝修剪机器人,其特征在于:包括可移动组件,在所述可移动组件上可活动转动设有伸缩组件,所述伸缩组件底端带有修剪组件。
7.对本发明做进一步优选,所述可移动组件包括遥控山地车,所述遥控山地车上安装支撑架,以及在遥控山地车上设有相配平衡的配重块。
8.对本发明做进一步优选,所述遥控山地车内部设置有电动机及远程控制系统,且遥控山地车与滚轮构成旋转结构,并且滚轮表面开设有防滑纹。
9.对本发明做进一步优选,所述遥控山地车设有设有相应的工具存放区。
10.对本发明做进一步优选,所述修剪组件包括延伸杆,在所述延伸杆固定连接油锯。
11.对本发明做进一步优选,所述延伸杆外壁通过电动旋转座设有照明灯,所述照明灯可实现旋转。
12.对本发明做进一步优选,所述伸缩组件包括多个机械臂,相邻机械臂之间通过带有谐波减速机的关节实现转动连接。
13.对本发明做进一步优选,所述机械臂与支撑架之间、与延伸杆之间通过关节连接。
14.对本发明做进一步优选,所述机械臂包括臂体,所述臂体内部形成空腔,所述空腔内部设有照明指示灯。
15.与现有技术相比,本发明的有益效果是:
16.1.本发明设置有遥控山地车,便于远程控制机器人按照指定路线依次进行修剪,提高工作效率,减低工人的劳动强度。
17.2.本发明设置有机械臂,通过谐波减速机带动自由弯折,便于对不同角度的树枝进行修剪,同时机械臂便于对高度较高的树枝进行修剪,链锯通过连杆及伸缩杆带动实现小范围摆动,提高修剪范围。
附图说明
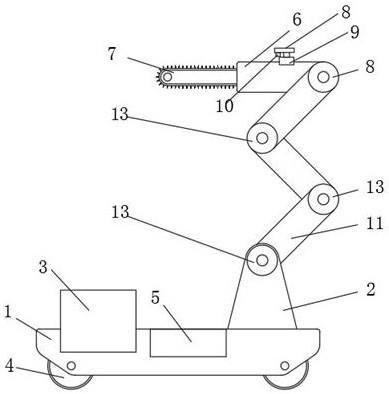
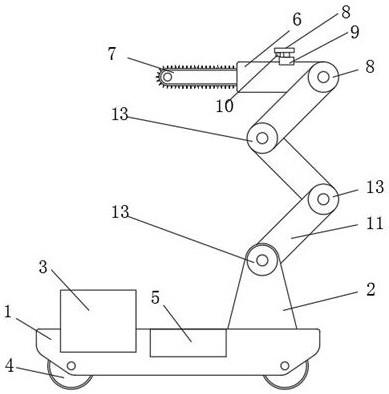
18.图1为本发明主视结构示意图。
19.图2为本发明机械臂结构示意图。
20.图3为本发明机械臂结构示意图。
具体实施方式
21.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
22.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
23.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.请参阅图1
‑
3,本发明提供的一种实施例:一种用于市政的道路树枝修剪机器人,其特征在于:包括可移动组件,在所述可移动组件上可活动转动设有伸缩组件,所述伸缩组件底端带有修剪组件。
26.本发明中所述可移动组件包括遥控山地车1,所述遥控山地车1上安装支撑架2,以及在遥控山地车1上设有相配平衡的配重块3,所述遥控山地1车内部设置有电动机及远程控制系统,且遥控山地车1与滚轮4构成旋转结构,并且滚轮4表面开设有防滑纹,所述遥控山地车1设有设有相应的工具存放区5。本发明集中遥控山地车整体使用就很便捷,通过遥控操作,整体灵活性就大大加强。
27.本发明所述修剪组件包括延伸杆6,在所述延伸杆6固定连接油锯7,所述延伸杆6外壁通过电动旋转座9设有照明灯8,所述照明灯8可实现任意角度旋转。这样的设计,在市场上面是没有的,照明灯可以根据需要进行旋转,尤其在一些大型树木上修剪的时候,没有很好的照明,不容易切割;另外该照明也能够起到一定的警示作用。本发明在照明灯下方设有摄像头10,方便工作人进行察看一些特殊情况,如电线或者其他一些不明情况,这将解决
工作人员劳动强度大的问题。
28.本发明所述伸缩组件包括多个机械臂11,相邻机械臂11之间通过带有谐波减速机12的关节13实现转动连接,所述机械臂11与支撑架2之间、与延伸杆6之间通过关节13连接,所述机械臂11包括臂体,所述臂体内部形成空腔,所述空腔内部设有照明指示灯14,其中照明指示灯为多种颜色,便于辨别方向,同时也能够起到警示作用。其中照明指示灯采用红色照明指示灯、黄色照明指示灯和绿色照明指示灯,通过控制板进行控制,当机械臂左倾的时候为红色照明指示灯发光,当机械臂右倾的时候为绿色照明指示灯,当机械臂为垂直的时候为黄色照明指示灯,其中这些照明指示灯都带有倾斜开关自动控制开与关;这些照明指示灯可以设置在机械臂外壁也可以是内壁,在机械臂上形成相应的开口就可以设置。
29.本阀门中通过关节控制机械臂自由弯折,便于对不同角度的树枝进行修剪,延伸杆9和链锯10总长10m,机械臂5设置有三段均长5m,支撑架3高1.5m,遥控山地车1和滚轮2总高1.5m,便于对高度较高的树枝进行修剪,同时也扩大了修剪范围。
30.工作原理:本发明在使用时,需要对本发明进行简单的结构了解,遥控山地车1内部设置有电动机及远程控制系统,远程控制机器人按照指定路线依次进行修剪,关节4与机械臂构成旋转结构,机械臂通过谐波减速机11带动自由弯折,便于对不同角度的树枝进行修剪,同时便于对高度较高的树枝进行修剪,延伸杆也是通过关节与机械臂进行旋转连接,操作的时候能够提高修剪范围。
31.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。