一种适用于星载变prf sar系统的成像方法
技术领域
1.本发明属于雷达成像处理领域,主要构造一种星载sar成像处理算法来解决雷达成像方位模糊问题。特别适用于星载变脉冲重复频率(pulse repetition frequency,prf)sar体制下,方位维出现非均匀采样而导致方位多普勒模糊问题,实现变prf
‑
sar系统对地面场景的成像处理。
背景技术:
2.星载合成孔径雷达(synthetic aperture radar,sar)作用距离长、覆盖范围广,具备全天时、全天候的对地观测能力。然而传统星载sar存在无法兼顾高方位向分辨力与宽测绘带的固有矛盾。为了解决这一矛盾,研究者提出采用可变脉冲重复频率(pulse repetition frequency,prf)的星载sar体制。该体制下,雷达利用了反射天线和数字波束形成(digital beam
‑
forming,dbf)来获取高分辨宽测绘带的sar图像。更重要的是,借助变化的prf,该体制的雷达可以解决传统的基于dbf体制的星载sar无法克服的盲区问题。此外,该体制的sar还具有低成本的优点,因而对其进行研究具有重要意义。然而,可变prf
‑
sar系统的回波存在着方位向非均匀采样和数据丢失的特点,利用传统sar成像算法处理数据会导致成像质量严重恶化,甚至完全无法成像。因此,研究在变prf体制下对地面场景有效成像聚焦具有非常重大的意义。
技术实现要素:
3.要解决的技术问题
4.为了解决方位向非均匀采样这一问题,本发明提出一种适用于星载变prf sar系统的成像方法。
5.技术方案
6.一种适用于星载变prf sar系统的成像方法,其特征在于步骤如下:
7.步骤1:获取的杂波抑制之后雷达系统回波信号是二维矩阵s(t
n
,t
m
),s(t
n
,t
m
)为nrn
×
nan维矩阵,其中,矩阵的每一行数据都是对回波方位维进行非均匀采样得到的结果;对矩阵的列进行fft处理,即实现雷达回波信号的距离向傅里叶变换,并将结果分别保存在矩阵s(f
n
,t
m
)中;
8.其中,t
n
为距离快时间,t
m
为非均匀采样方位慢时间,f
n
表示为距离向频域坐标,b为发射信号带宽,δf为距离频域间隔,n=0,1,...,nrn
‑
1,nrn表示距离向点数,nan表示方位向点数;
9.步骤2:根据已知的雷达参数,构造参考信号向量s_ref(i,1),i=1,2...nrn,s_ref(i,1)为nrn
×
1向量;
10.步骤3:取出步骤1得到的s(f
n
,t
m
)的每一列,点乘参考信号向量s_ref(i,1)的共轭,得到距离脉压后的数据矩阵s(f
n
,t
m
);
11.步骤4:根据已知的雷达参数,构造非线性变标校正矩阵h_cs(i,j),h_cs(i,j)为nrn
×
nan矩阵;
12.步骤5:取出步骤3得到的s(f
n
,t
m
)点乘校正矩阵h_cs(i,j)的共轭,得到非线性变标校正之后的数据矩阵s'(f
n
,t
m
');其中,t
m
'表示方位均匀采样时间序列;
13.步骤6:根据已知的雷达参数,构造距离弯曲校正矩阵self_rcmc(f
n
,f
m
),self_rcmc(f
n
,f
m
)为nrn
×
nan矩阵;
14.步骤7:取出步骤5得到的s'(f
n
,t
m
')进行方位维的傅里叶变换,再二维频域内点乘参考信号向量self_rcmc(f
n
,f
m
),并进行距离方位的二维傅里叶逆变换得到弯曲校正之后的数据矩阵s”(t
n
,t
m
');
15.步骤8:取出步骤7得到的s”(t
n
,t
m
'),对数据进行时延补偿并进行相干累加,并将结果保存在矩阵s
sum
(t
n
,t
m
')中,即为获得的聚焦地面目标成像结果图。
16.本发明进一步的技术方案为:步骤2具体如下:根据已知的雷达参数,参考信号向量其中,γ表示调频率,γ=b/tp,b表示发射信号带宽,tp表示发射脉冲宽度,f
r
表示为距离向频域。
17.本发明进一步的技术方案为:步骤4具体如下:
18.根据已知的雷达参数,脉冲重复时间序列为:
[0019][0020]
设方位慢时间对应均匀采样时间:
[0021]
t
m
'=[pri0,2pri0,3pri0,
…
,i
·
pri0,
…
i
·
pri0]
[0022]
得到非均匀采样时间序列和均匀采样时间序列之间的关系:
[0023][0024]
其中,δ为相邻采样间隔差值,pri0为脉冲重复速率,t
m
'为均匀采样时间序列;
[0025]
将上述关系式代入斜距表达式,可得:
[0026][0027]
根据上述斜距表达式构造非线性变标校正矩阵为:
[0028][0029]
其中h
cs
为相位补偿因子:
[0030][0031]
f
c
表示雷达发射信号的载频,c为电磁波的传播速度,v为雷达平台运动速度,r
b
为雷达到场景中心点最近距离。
[0032]
本发明进一步的技术方案为:步骤6具体如下:根据已知雷达参数,构造距离弯曲校正矩阵:
[0033][0034]
其中prf为脉冲重复频率,
[0035]
本发明进一步的技术方案为:步骤8具体如下:对成像场景划分网格点获得所有网格点坐标,以最近距离为参考点,从方位起始点开始,计算当前方位向上,雷达与所有网格点的距离并计算所有网格点相对于最近距离参考点的延迟时间δt,利用每一网格点的时延对回波数据进行相位补偿exp(j2πf
c
δt),对每个雷达位置对应的s”(t
n
,t
m
')进行相干累加得到累加和s
sum
(t
n
,t
m
'),s
sum
(t
n
,t
m
')即为获得的聚焦目标成像结果图。
[0036]
有益效果
[0037]
本发明提出的一种新的方位非均匀采样重构方法——在方位多普勒时域中引入非线性变标技术对回波进行处理,使得处理之后回波信号等效于时间均匀采样,然后针对该方法校正后遗留下来的剩余校正误差项,分析了误差响应因子,利用后向投影算法对图像进行重建,消除了误差的同时实现了变prf sar系统下的无模糊成像。
[0038]
本发明克服了已有sar成像技术无法对变脉冲重复频率体制sar系统进行成像处理的问题,针对方位维非均匀采样导致方位多普勒模糊问题,使用非线性变标法对非均匀采样数据进行校正,并通过后向投影算法解决校正后的剩余误差项,以达到对目标进行良好聚焦的效果。
附图说明
[0039]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0040]
图1方位非均匀采样回波信号;
[0041]
图2对回波进行距离脉冲压缩处理;
[0042]
图3进行弯曲校正处理;
[0043]
图4使用bp算法进行方位匹配脉压后的成像结果;
[0044]
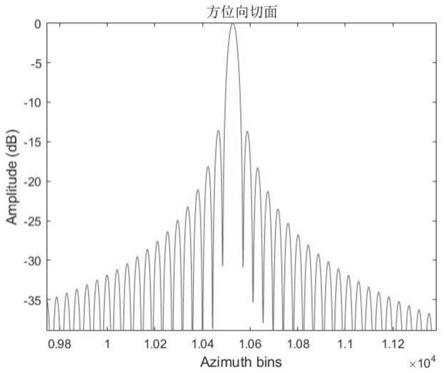
图5成像结果方位向切面图。
具体实施方式
[0045]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对
本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0046]
本发明方法包括以下步骤:
[0047]
步骤1,获取的杂波抑制之后雷达系统回波信号是二维矩阵s(t
n
,t
m
),s(t
n
,t
m
)为nrn
×
nan维矩阵,其中,矩阵的每一行数据都是对回波方位维进行非均匀采样得到的结果。对矩阵的列进行fft处理,即实现雷达回波信号的距离向傅里叶变换,并将结果分别保存在矩阵s(f
n
,t
m
)中;
[0048]
其中,t
n
为距离快时间,t
m
为非均匀采样方位慢时间,f
n
表示为距离向频域坐标,b为发射信号带宽,δf为距离频域间隔,n=0,1,...,nrn
‑
1,nrn表示距离向点数,nan表示方位向点数。
[0049]
步骤2,根据已知的雷达参数,构造参考信号向量s_ref(i,1),i=1,2...nrn,s_ref(i,1)为nrn
×
1向量;其中,nrn表示距离向点数;
[0050]
步骤3,取出步骤1得到的s(f
n
,t
m
)的每一列,点乘参考信号向量s_ref(i,1)的共轭,得到距离脉压后的数据矩阵s(f
n
,t
m
);
[0051]
步骤4,根据已知的雷达参数,构造非线性变标校正矩阵h_cs(i,j),h_cs(i,j)为nrn
×
nan矩阵;
[0052]
其中,nrn表示距离向点数,nan表示方位向点数;
[0053]
步骤5,取出步骤3得到的s(f
n
,t
m
)点乘校正矩阵h_cs(i,j)的共轭,得到非线性变标校正之后的数据矩阵s'(f
n
,t
m
');
[0054]
其中,t
m
'表示方位均匀采样时间序列。
[0055]
步骤6,根据已知的雷达参数,构造距离弯曲校正矩阵self_rcmc(f
n
,f
m
),self_rcmc(f
n
,f
m
)为nrn
×
nan矩阵;
[0056]
步骤7,取出步骤5得到的s'(f
n
,t
m
')进行方位维的傅里叶变换,再二维频域内点乘参考信号向量self_rcmc(f
n
,f
m
),并进行距离方位的二维傅里叶逆变换得到弯曲校正之后的数据矩阵s”(t
n
,t
m
');
[0057]
步骤8,取出步骤7得到的s”(t
n
,t
m
'),对数据进行时延补偿并进行相干累加,并将结果保存在矩阵s
sum
(t
n
,t
m
')中,即为获得的聚焦地面目标成像结果图。
[0058]
上述技术方案的特点和改进点在于:
[0059]
步骤2具体操作如下:
[0060]
根据已知的雷达参数,参考信号向量
[0061]
其中,γ表示调频率,γ=b/tp,b表示发射信号带宽,tp表示发射脉冲宽度,f
r
表示为距离向频域
[0062]
步骤4具体操作如下:
[0063]
根据已知的雷达参数,脉冲重复时间序列为:
[0064]
[0065]
设方位慢时间对应均匀采样时间:
[0066]
t
m
'=[pri0,2pri0,3pri0,
…
,i
·
pri0,
…
i
·
pri0]
[0067]
得到非均匀采样时间序列和均匀采样时间序列之间的关系:
[0068][0069]
其中,δ为相邻采样间隔差值,pri0为脉冲重复速率,t
m
'为均匀采样时间序列。
[0070]
将上述关系式代入斜距表达式,可得:
[0071][0072]
根据上述斜距表达式构造非线性变标校正矩阵为:
[0073][0074]
其中h
cs
为相位补偿因子:
[0075][0076]
f
c
表示雷达发射信号的载频,c为电磁波的传播速度,v为雷达平台运动速度,r
b
为雷达到场景中心点最近距离。
[0077]
步骤6具体操作如下:
[0078]
根据已知雷达参数,构造距离弯曲校正矩阵:
[0079][0080]
其中prf为脉冲重复频率,m=0,1,......,nan
‑
1。
[0081]
步骤8具体操作如下:
[0082]
对成像场景划分网格点获得所有网格点坐标,以最近距离为参考点,从方位起始点开始,计算当前方位向上,雷达与所有网格点的距离并计算所有网格点相对于最近距离参考点的延迟时间δt,利用每一网格点的时延对回波数据进行相位补偿exp(j2πf
c
δt),对每个雷达位置对应的s”(t
n
,t
m
')进行相干累加得到累加和s
sum
(t
n
,t
m
'),s
sum
(t
n
,t
m
')即为获得的聚焦目标成像结果图。
[0083]
至此,一种变脉冲重复频率体制下的合成雷达目标成像算法基本完成。
[0084]
以下通过仿真实验数据来进一步验证本发明的有效性。
[0085]
(一)仿真实验
[0086]
1.仿真参数
[0087]
为了验证本发明方法的有效性,此处给出了表1中的仿真参数。
[0088]
表1部分仿真数据参数
[0089]
载频9.6ghz脉冲重复频率5000hz雷达平台速度7600m/s方位维天线孔径6m雷达平台高度780km俯仰维天线孔径1.44m发射信号调频带宽200mhz发射信号脉宽2*10^
‑
7s复采样频率280mhz非均匀间隔差10^
‑
8s
[0090]
2.仿真内容
[0091]
图1
‑
5示意了利用本发明提出的非线性变标校正处理雷达方位非均匀采样数据得到无模糊的成像处理结果。从图中可以看出本发明方法的目标成像聚焦效果,采用本发明方法的可以有效解决变脉冲重复频率sar系统下的目标成像问题。
[0092]
综上所述,仿真实验验证了本发明的正确性,有效性和可靠性。
[0093]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。