1.本发明涉及传感器相关技术领域,具体为一种海洋电场传感器。
背景技术:
2.电场传感器是一种具有良好的抗电磁干扰能力和快速响应速度的传感器。通过测量电变量就能够测量高电压电力系统中的瞬变电场,可广泛用于电场强度的探测。
3.其中,海洋电场传感器主要用于探测海底岩层结构的分布,这已经成为了海底探矿的主要方法之一,为了保证信号的可靠性,需要确保两个传感器电极之间足够大的间距,而由于海洋中的作业条件的限制,使得大的检测间距会导致电场信号减弱,所以目前海洋电场传感器两个传感器电极之间的间距一般不超过一米。
4.由于目前的海洋电场传感器在投放时,无法精确控制两个传感器电极之间的间距,使得在检测过程中无法根据实际检测需求,实时调节传感器电极之间的间距,而且目前的海洋电场传感器在海中的位置无法调整,使得在海洋电场检测过程中受到干扰后无法第一时间调整位置。
技术实现要素:
5.本发明的目的在于提供一种海洋电场传感器,用于克服现有技术中的上述缺陷。
6.根据本发明的一种海洋电场传感器,包括两个左右对称设置的潜浮箱,所述潜浮箱内设置浮潜组件,左右两侧所述潜浮箱之间设置有动力箱,所述潜浮箱下侧面固定有传感器电极;所述浮潜组件包括设置于所述潜浮箱内的浮力调节块,所述潜浮箱内设有开口向上的浮力腔,所述浮力调节块与所述浮力腔之间形成一对滑动副,所述浮力腔下侧连通设有螺纹套腔,所述浮力调节块下端壁上固定有螺纹套,所述浮力调节块内设有向下延伸贯穿所述螺纹套至向下开口的螺纹腔,所述螺纹套腔下端壁内转动配合有丝杆,所述丝杆上侧部分向上延伸至所述螺纹腔内,所述丝杆与所述螺纹腔螺纹配合连接,所述浮潜组件用于所述潜浮箱的上浮或下潜。
7.优选地,所述螺纹套腔下侧设有斜齿轮腔,所述潜浮箱内转动配合有从左至右贯穿所述潜浮箱和斜齿轮腔的花键套,所述花键套内花键配合有花键轴,所述花键套上固定有位于所述斜齿轮腔内的主动斜齿轮,所述丝杆下侧部分向下延伸至所述斜齿轮腔内,所述丝杆下侧末端固定有与所述主动斜齿轮啮合的从动斜齿轮,通过所述丝杆转动带动所述浮力调节块上下运动,从而改变所述浮力腔的空间,进而改变所述潜浮箱受到的浮力,从而实现所述潜浮箱上浮下潜。
8.优选地,所述潜浮箱内设有左右贯通的导向杆腔,所述导向杆腔位于所述花键套下侧,所述导向杆腔内滑动配合有导向杆,所述导向杆向外延伸至所述潜浮箱外,所述导向杆远离所述动力箱一侧端面固定有调节杆座,所述导向杆内设有前后贯通的调节杆腔,所述调节杆腔内设置有与所述导向杆腔前后两侧端壁均螺纹配合的间距调节杆,通过所述间
距调节杆的转动可带动所述潜浮箱左右运动。
9.优选地,所述动力箱内设有锥齿轮腔,所述导向杆内侧端面固定于所述动力箱外侧端面上,所述锥齿轮腔上侧设有与所述动力箱固定连接的电机,所述电机下端面固定有向下延伸至所述锥齿轮腔内的电机轴,所述电机轴上花键配合有位于所述锥齿轮腔内的轴套,所述轴套上固定有上下对称的主动锥齿轮,所述轴套上侧末端固定有磁性座,所述锥齿轮腔上端壁内固定有与所述电机轴转动配合的电磁铁,所述电磁铁与所述磁性座之间固定有弹簧,通过所述电磁铁的得失电可带动所述主动锥齿轮上下运动。
10.优选地,所述花键轴靠近所述动力箱一侧部分向靠近所述动力箱一侧方向延伸至所述锥齿轮腔内,所述花键轴靠近所述动力箱一侧末端固定有能够与上侧的所述主动锥齿轮啮合的上锥齿轮,通过上侧的所述主动锥齿轮带动所述上锥齿轮转动,可实现所述浮力调节块的上下运动,从而实现所述潜浮箱的上浮下潜。
11.优选地,所述间距调节杆靠近所述动力箱一侧方向部分向靠近所述动力箱一侧方向延伸至所述锥齿轮腔内,所述间距调节杆靠近所述动力箱一侧末端固定有能够与下侧的所述主动锥齿轮啮合的下锥齿轮,通过下侧的所述主动锥齿轮带动所述下锥齿轮转动,可实现改变左右侧传感器电极的间距,从而满足不同情况下的海洋电场检测要求。
12.本发明的有益效果是:本发明通过浮力调节块的上下运动,使得本发明的总体密度发生变化,进而实现潜浮箱的上升下潜,从而使得本发明可探测不同深度的海洋电场强度,同时利用间距调节杆转动,使得左右两侧潜浮箱靠近或远离,进而改变左右两侧传感器电极之间的间距,从而使得本发明满足不同条件下的检测要求,提高了本发明的适用性,而且本发明结构简单,便于大范围推广。
附图说明
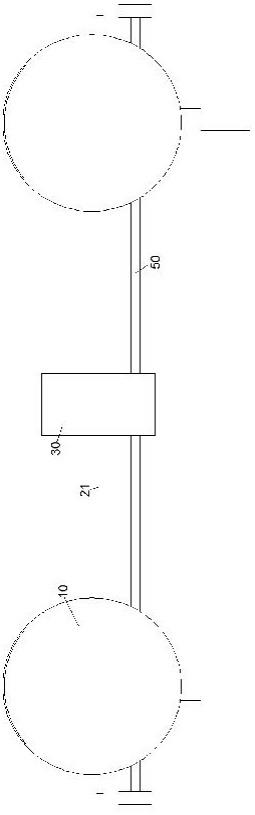
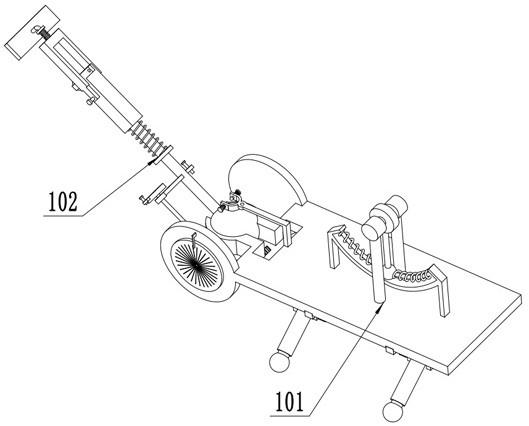
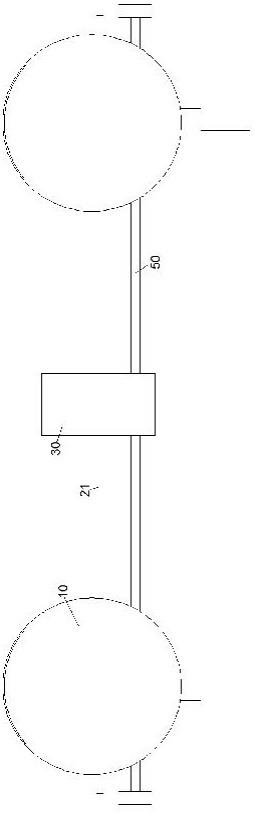
13.图1是本发明的外观示意图;图2是本发明的一种海洋电场传感器整体结构示意图;图3是本发明图2中动力箱部件的局部放大示意图;图4是本发明图2中潜浮箱部件的局部放大示意图;图5是本发明图4中a
‑
a的示意图。
14.图中:10、潜浮箱;11、浮力腔;12、传感器电极;13、斜齿轮腔;14、螺纹套腔;20、浮力调节块;21、花键轴;22、螺纹套;23、丝杆;24、从动斜齿轮;25、主动斜齿轮;26、螺纹腔;27、花键套;30、动力箱;40、电机;42、电磁铁;43、弹簧;44、磁性座;45、上锥齿轮;46、轴套;47、电机轴;48、锥齿轮腔;49、主动锥齿轮;50、间距调节杆;51、调节杆座;52、导向杆;53、调节杆腔;54、导向杆腔;55、下锥齿轮。
具体实施方式
15.为了使本发明的目的及优点更加清楚明白,以下结合实施例对本发明进行具体说明,应当理解为以下文字仅仅用以描述本发明的一种或几种具体的实施方式,并不对本发明具体请求的保护范围进行严格限定,如在本文中所使用,术语上下和左右不限于其严格的几何定义,而是包括对于机加工或人类误差合理和不一致性的容限,下面详尽说明该一
种海洋电场传感器的具体特征:参照图1
‑
5,根据本发明的实施例的一种海洋电场传感器,包括两个左右对称设置的潜浮箱10,其特征在于:所述潜浮箱10内设置浮潜组件,左右两侧所述潜浮箱10之间设置有动力箱30,所述潜浮箱10下侧面固定有传感器电极12;所述浮潜组件包括设置于所述潜浮箱10内的浮力调节块20,所述潜浮箱10内设有开口向上的浮力腔11,所述浮力调节块20与所述浮力腔11之间形成一对滑动副,所述浮力腔11下侧连通设有螺纹套腔14,所述浮力调节块20下端壁上固定有螺纹套22,所述浮力调节块20内设有向下延伸贯穿所述螺纹套22至向下开口的螺纹腔26,所述螺纹套腔14下端壁内转动配合有丝杆23,所述丝杆23上侧部分向上延伸至所述螺纹腔26内,所述丝杆23与所述螺纹腔26螺纹配合连接,所述浮潜组件用于所述潜浮箱10的上浮或下潜。
16.在本发明中:所述螺纹套腔14下侧设有斜齿轮腔13,所述潜浮箱10内转动配合有从左至右贯穿所述潜浮箱10和斜齿轮腔13的花键套27,所述花键套27内花键配合有花键轴21,使得所述花键套27无论位于所述花键轴21上的任何位置,所述花键轴21均可带动所述花键套27转动,所述花键套27上固定有位于所述斜齿轮腔13内的主动斜齿轮25,所述丝杆23下侧部分向下延伸至所述斜齿轮腔13内,所述丝杆23下侧末端固定有与所述主动斜齿轮25啮合的从动斜齿轮24,通过所述丝杆23转动带动所述浮力调节块20上下运动,从而改变所述浮力腔11的空间,进而改变所述潜浮箱10受到的浮力,从而实现所述潜浮箱10上浮下潜。
17.在本发明中:所述潜浮箱10内设有左右贯通的导向杆腔54,所述导向杆腔54位于所述花键套27下侧,所述导向杆腔54内滑动配合有导向杆52,所述导向杆52起到了导向作用,使得所述导向杆腔54能在所述导向杆52上滑动,所述导向杆52向外延伸至所述潜浮箱10外,所述导向杆52远离所述动力箱30一侧端面固定有调节杆座51,所述导向杆52内设有前后贯通的调节杆腔53,所述调节杆腔53内设置有与所述导向杆腔54前后两侧端壁均螺纹配合的间距调节杆50,通过所述间距调节杆50的转动可带动所述潜浮箱10左右运动。
18.在本发明中:所述动力箱30内设有锥齿轮腔48,所述导向杆52内侧端面固定于所述动力箱30外侧端面上,所述锥齿轮腔48上侧设有与所述动力箱30固定连接的电机40,所述电机40下端面固定有向下延伸至所述锥齿轮腔48内的电机轴47,所述电机轴47上花键配合有位于所述锥齿轮腔48内的轴套46,所述轴套46上固定有上下对称的主动锥齿轮49,所述轴套46上侧末端固定有磁性座44,所述锥齿轮腔48上端壁内固定有与所述电机轴47转动配合的电磁铁42,所述电磁铁42与所述磁性座44之间固定有弹簧43,通过所述电磁铁42的得失电可带动所述主动锥齿轮49上下运动。
19.在本发明中:所述花键轴21靠近所述动力箱30一侧部分向靠近所述动力箱30一侧方向延伸至所述锥齿轮腔48内,所述花键轴21靠近所述动力箱30一侧末端固定有能够与上侧的所述主动锥齿轮49啮合的上锥齿轮45,通过上侧的所述主动锥齿轮49带动所述上锥齿轮45转动,可实现所述浮力调节块20的上下运动,从而实现所述潜浮箱10的上浮下潜。
20.在本发明中:所述间距调节杆50靠近所述动力箱30一侧方向部分向靠近所述动力箱30一侧方向延伸至所述锥齿轮腔48内,所述间距调节杆50靠近所述动力箱30一侧末端固定有能够与下侧的所述主动锥齿轮49啮合的下锥齿轮55,通过下侧的所述主动锥齿轮49带动所述下锥齿轮55转动,可实现改变左右侧传感器电极12的间距,从而满足不同情况下的
海洋电场检测要求。
21.本发明的一种海洋电场传感器,其工作流程如下:启动传感器电极12,将本发明放置于海中,由于初始状态时,浮力调节块20上侧面与潜浮箱10外圆面平齐,使得浮力调节块20下侧空间处于最大的状态,下侧的主动锥齿轮49与下锥齿轮55啮合,上侧的主动锥齿轮49与上锥齿轮45啮合。
22.此时由于潜浮箱10受到海水的浮力,使得左右两侧潜浮箱10漂浮于海面。
23.若要将潜浮箱10潜入海中,则通过遥控设备远程控制电磁铁42启动,则使得电磁铁42得电吸引磁性座44,使得磁性座44克服弹簧43的弹力向上运动,从而带动轴套46向上运动,进而使得上侧的主动锥齿轮49向上运动至与上锥齿轮45啮合,下侧的主动锥齿轮49向上运动至与下锥齿轮55脱离啮合。
24.接着启动电机40,使得电机40带动电机轴47转动,从而使得主动锥齿轮49转动,则上侧的主动锥齿轮49带动上锥齿轮45转动,进而使得花键轴21转动,进而带动花键套27转动,从而使得主动斜齿轮25转动,从而带动从动斜齿轮24转动,进而使得丝杆23转动,进而带动螺纹套22向下运动,从而使得浮力调节块20向下运动,则使得浮力调节块20下侧空间减小,进而使得潜浮箱10整体密度增大,则潜浮箱10受到的浮力减小,从而实现潜浮箱10向下运动至海中的目的。
25.到达指定深度后,关闭电磁铁42和电机40,潜浮箱10停止向下运动,通过调节浮力调节块20向下运动的距离,即可控制潜浮箱10向下运动的距离。
26.通过左右两侧传感器电极12检测海洋中的电场强度。
27.为了保证信号可靠性,左右两侧传感器电极12的间距需要足够大,而由于海洋中的作业条件限制,增大左右两侧之间的间距,则会使得电场信号减弱,所以需要根据实际情况调节左右两侧传感器电极12之间的间距。
28.则此时,启动电机40,从而带动主动锥齿轮49转动,由于电磁铁42处于关闭状态,则上侧的主动锥齿轮49与上锥齿轮45未啮合,下侧的主动锥齿轮49与下锥齿轮55啮合,从而使得下侧的主动锥齿轮49带动下锥齿轮55转动,进而带动间距调节杆50转动,进而使得左右两侧潜浮箱10相互靠近,直至到达指定间距后,关闭电机40,则左右两侧潜浮箱10停止运动。
29.此时,左右两侧传感器电极12开始正常的检测作业。
30.本领域的技术人员可以明确,在不脱离本发明的总体精神以及构思的情形下,可以做出对于以上实施例的各种变型。其均落入本发明的保护范围之内。本发明的保护方案以本发明所附的权利要求书为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。