1.本发明属于苗木种子种植领域。
背景技术:
2.苗木种子种植以往直接采用播撒的形式,这种播撒种子的形式只适合气候湿润土壤本身比较肥沃的区域,一旦在气候偏干旱,土壤干燥成硬块,土体肥力低的地区种植,直接采用播撒的形式的存活率极低,因此需要涉设计一种专门针对土壤干旱,肥力不高的土地种植装置。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本发明提供一种针对干旱土壤的苗木种子自动化种植系统与种植方法。
4.技术方案:为实现上述目的,本发明的一种苗木种子自动化种植系统,包括能水平位移的机械臂,所述机械臂末端固定安装有储料器,所述储料器的下方设置有种植单元;储料器的下端分别并列设置有第一下料单元、第二下料单元和第三下料单元,所述第一下料单元、第二下料单元和第三下料单元能分别将种子、颗粒状肥料和水下料给所述种植单元。
5.进一步的,所述种植单元包括开口朝下且轴线为水平的半圆饼状壳体,所述半圆饼状壳体的顶端固定连接有竖向的进料漏斗;进料漏斗能接到正上方从所述第一下料单元、第二下料单元和第三下料单元分别漏出的种子、颗粒状肥料和水;所述进料漏斗的下端为向下贯通的漏料通道;
6.进一步的,所述储料器的下侧还固定安装有升降器,所述升降器的升降杆下端固定连接所述半圆饼状壳体外壁,从而使升降器带动所述半圆饼状壳体上下升降。
7.进一步的,所述半圆饼状壳体的下端开口处沿矩形轮廓一体化设置矩形环壁;所述升降杆的向下伸出能使所述矩形环壁的下端面接触到地面;
8.所述半圆饼状壳体的壳腔内同轴心设置有回转轴,所述半圆饼状壳体的壳腔内还设置有土块破碎轴,所述土块破碎轴的轴线与所述回转轴的轴线平行;在回转轴的轴线视角下,所述土块破碎轴在回转轴的左下方;所述土块破碎轴通过轴承与所述半圆饼状壳体侧壁上的轴承孔转动配合;
9.所述土块破碎轴的外壁上呈圆周阵列发散状设置有若干用于土块破碎和肥料拌匀的尖刺体;若干尖刺体随土块破碎轴同步回转时的所在高度始终高出所述矩形环壁下端;所述土块破碎轴的一端部同轴心一体化设置有传动齿轮,所述回转轴的外壁沿轮廓阵列分布有若干传动齿体,所述传动齿轮与所述回转轴上的传动齿体啮合;从而使回转轴的回转在啮合传动的作用下带动所述传动齿轮,从而使土块破碎轴跟着沿自身轴线回转;
10.还包括圆弧形铲土片,所述圆弧形铲土片的圆弧轴心在所述回转轴的轴线上,所述圆弧形铲土片的外弧面与所述半圆饼状壳体的圆弧内壁面滑动配合,所述圆弧形铲土片的圆弧顺时针端为锋利铲土端;所述圆弧形铲土片的圆弧逆时针端通过圆弧推土片一体化
连接所述回转轴的外壁,从而使圆弧形铲土片随所述回转轴同步运动;所述圆弧形铲土片的逆时针端与所述圆弧推土片的顺时针端相切;将所述圆弧推土片的凹面记为圆弧推土面,将所述圆弧推土片的凸面记为圆弧引流面;当所述圆弧形铲土片的锋利铲土端为圆弧形铲土片的最下端,且圆弧形铲土片的锋利铲土端与矩形环壁底部所在高度一致时,所述圆弧推土片刚好在漏料通道的正下方,从漏料通道漏下的肥料颗粒在圆弧推土片的圆弧引流面的引流作用下向右侧滑落并坠落到壳腔内的右侧部分的土块破碎轴所在位置;
11.还包括种子转运杯,所述种子转运杯的杯体内侧为种子仓,所述种子仓内至少容纳一颗种子,所述种子转运杯的杯口与所述半圆饼状壳体的圆弧内壁面滑动配合;从而使所述半圆饼状壳体的圆弧内壁面封堵所述种子转运杯的杯口,所述种子转运杯的杯底通过连通杆固定连接所所述回转轴的外壁,从而使种子转运杯随所述回转轴同步回转,当圆弧形铲土片的锋利铲土端随回转轴顺时针回转到回转轴的轴心正下方时,所述种子转运杯的杯口刚好连通所述漏料通道的下端,从而使漏料通道向下漏出的种子到达种子转运杯的种子仓中;
12.所述回转轴的轴心处同轴心设置有圆柱空心仓,所述连通杆内设沿长度方向贯通设置有导液通道;所述导液通道将圆柱空心仓与种子仓相互连通;所述导液通道的内径小于任意一颗种子的外径;
13.所述圆柱空心仓内同轴心设置有固定空心轴,所述固定空心轴的一端通过固定件与所述半圆饼状壳体的侧壁固定连接;所述固定空心轴的外壁与所述圆柱空心仓的内壁滑动配合;所述固定空心轴内为水暂存仓,所述固定空心轴的上下端分别设置有上下贯通的上连通孔和下连通孔;
14.当种子转运杯的杯口刚好连通所述漏料通道的下端时,所述导液通道通过所述上连通孔连通所述水暂存仓的上端;当种子转运杯到达所述回转轴正下方时,所述导液通道通过所述下连通孔连通所述水暂存仓的下端。
15.进一步的,还包括半圆饼状壳体外部的回转轴驱动电机,所述回转轴驱动电机的输出轴与所述回转轴同轴心驱动连接,所述回转轴驱动电机通过电机支架与所述半圆饼状壳体的外侧壁固定连接。
16.进一步的,所述固定空心轴壁体内还设置有气压平衡通道;所述气压平衡通道将水暂存仓上端连通外部大气压。
17.进一步的,所述机械臂安装在能在地面行走的种植车上。
18.进一步的,苗木种子自动化种植系统的种子种植方法,其特征在于:
19.初始状态设置:
20.初始状态下,圆弧形铲土片的锋利铲土端为圆弧形铲土片的最下端,且圆弧形铲土片的锋利铲土端与矩形环壁底部所在高度一致时,这时圆弧推土片的圆弧引流面刚好在漏料通道的正下方;
21.具体工作过程包括如下步骤:
22.步骤一,种植车带动机械臂以及储料器和种植单元水平位移至指定的种植位置,这时种植单元在种植点位置的地面上方;
23.步骤二,控制升降器带动种植单元的半圆饼状壳体下降,直至半圆饼状壳体下端的矩形环壁的下端面接触到地面,从而使地面封堵住半圆饼状壳体的壳腔下端开口;
24.步骤三,这时控制第二下料单元将储料器内的颗粒状肥料下料到进料漏斗中,然后下料到进料漏斗中的颗粒状肥料通过漏料通道向下漏出的肥料颗粒在圆弧推土片的圆弧引流面的引流作用下向右侧滑落并坠落到壳腔内的右侧部分的土块破碎轴下方地面;
25.步骤四,控制回转轴驱动电机的输出轴带动回转轴顺时针缓慢回转,从而使圆弧形铲土片的锋利铲土端随回转轴沿圆弧切割线顺时针切割土壤,被圆弧形铲土片切割出来的土壤记为已切割土块;直至圆弧形铲土片的锋利铲土端随回转轴沿圆弧切割线顺时针切割运动到回转轴的轴心正下方时,种子转运杯的杯口刚好也运动到连通漏料通道的下端,这时导液通道通过上连通孔连通所述水暂存仓的上端;这时控制第三下料单元将储料器内的水下料到进料漏斗中,然后下料到进料漏斗中的水通过漏料通道向下漏出到种子转运杯的种子仓中,随后种子仓中的水通过导液通道继续向下流进水暂存仓内;这时由于下连通孔还处于被圆柱空心仓内壁封堵状态,因此水暂存仓内的水会累积,水暂存仓内的水满后暂停第三下料单元下料,与此同时第一下料单元将储料器内的一颗种子下料到进料漏斗中,随后漏料通道向下漏出一粒种子到达种子转运杯的种子仓中;
26.步骤五,随着回转轴继续顺时针缓慢回转,圆弧推土片的圆弧推土面会沿顺时针方向推动已切割土块,从而使已切割土块逐渐沿顺时针向土块破碎轴挤压;与此同时回转轴的回转在啮合传动作用下土块破碎轴也会跟着沿自身轴线回转,从而使土块破碎轴外壁的尖刺体对顺时针挤压过来的已切割土块进行破碎打散,与此同时由于“步骤三”中土块破碎轴所在位置已经存在肥料颗粒,因此土块破碎轴外壁的尖刺体对顺时针挤压过来的已切割土块进行破碎打散的过程中会均匀的绞入肥料颗粒,从而使已切割土块在被若干尖刺体破碎打散的过程中均匀的拌进一定量的肥料颗粒,从而使已切割土块逐渐变为松散的土肥混合物,并且松散的土肥混合物被圆弧形铲土片和圆弧推土片向上托起;随着回转轴继续顺时针缓慢回转,地面被圆弧形铲土片铲出了一个底面为圆弧形的种植土坑;当种子转运杯到达所述回转轴正下方时,种子转运杯内的种子也刚好到达种植土坑的最下端,这时的种子所在位置为埋种最佳位置,与此同时种子转运杯到达所述回转轴正下方时,导液通道通过下连通孔连通水暂存仓的下端,这时水暂存仓内暂时储存的水通过下连通孔和导液通道向下流出到种子转运杯种子仓中,并浸润种植土坑底部的种子和种子附近土壤;
27.步骤六,控制升降器带动种植单元的半圆饼状壳体上升,直至种子转运杯向上运动到脱离种植土坑底部的种子,从而使已经被水浸润的种子单独保留到种植土坑底部;
28.步骤七,随后控制回转轴驱动电机的输出轴带动回转轴逆时针回转,从而使圆弧形铲土片随回转轴逆时针回转到“初始状态”;圆弧形铲土片随回转轴逆时针的过程中,被圆弧形铲土片和圆弧推土片向上托起的松散的土肥混合物会在重力作用下向下倒出并洒落到种植土坑中,进而种植土坑内已经被水浸润的种子被松散的土肥混合物填埋,进而完成了一次种子种植过程,这样有效防止已经被水浸润的种子被过度蒸发,而且填埋种子的是松散的土肥混合物,既增强了土壤肥力,又不至于“烧苗”。
29.有益效果:本发明的种子转运杯到达所述回转轴正下方时,导液通道通过下连通孔连通水暂存仓的下端,这时水暂存仓内暂时储存的水通过下连通孔和导液通道向下流出到种子转运杯种子仓中,并浸润种植土坑底部的种子和种子附近土壤;圆弧形铲土片随回转轴逆时针的过程中,被圆弧形铲土片和圆弧推土片向上托起的松散的土肥混合物会在重力作用下向下倒出并洒落到种植土坑中,进而种植土坑内已经被水浸润的种子被松散的土
肥混合物填埋,进而完成了一次种子种植过程,这样有效防止已经被水浸润的种子被过度蒸发,而且填埋种子的是松散的土肥混合物,既增强了土壤肥力,又不至于“烧苗”。
附图说明
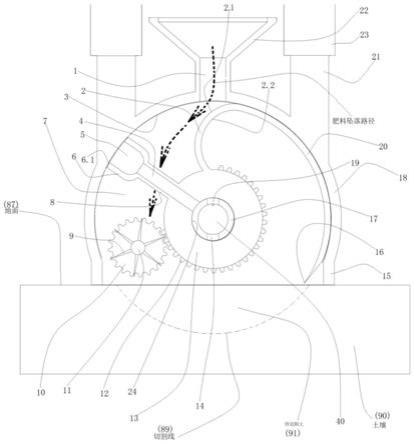
30.附图1为本装置的整体结构示意图;
31.附图2为本装置的状态结构第二视角示意图;
32.附图3为本装置的剖视图;
33.附图4为种植单元的剖视图;
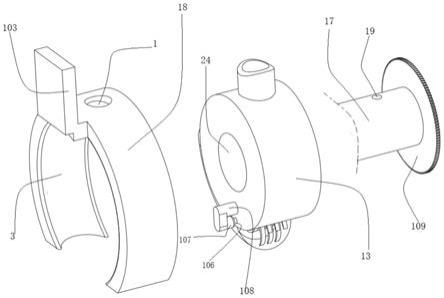
34.附图5为种植单元隐藏了半圆饼状壳体后的结构示意图;
35.附图6为附图5的第一剖视图;
36.附图7为附图5的基础上固定空心轴沿轴线方向拆卸后的剖视图;
37.附图8为“步骤三”示意图;
38.附图9为“步骤四”中种子转运杯的杯口刚好也运动到连通漏料通道的下端时的示意图;
39.附图10为“步骤五”中圆弧推土片的圆弧推土面沿顺时针方向推动已切割土块示意图;。
40.附图11为“步骤五”中的种子转运杯到达所述回转轴正下方时,种子转运杯内的种子也刚好到达种植土坑的最下端的示意图。
具体实施方式
41.下面结合附图对本发明作更进一步的说明。
42.如附图1至11所示的一种苗木种子自动化种植系统,包括能水平位移的机械臂32,本实施例的机械臂32安装在能在地面行走的种植车上,机械臂32末端固定安装有储料器31,储料器31的下方设置有种植单元70;储料器31的下端分别并列设置有第一下料单元28、第二下料单元29和第三下料单元30,第一下料单元28、第二下料单元29和第三下料单元30能分别将种子、颗粒状肥料和水下料给种植单元70。
43.种植单元70包括开口朝下且轴线为水平的半圆饼状壳体18,半圆饼状壳体18的顶端固定连接有竖向的进料漏斗22;进料漏斗22能接到正上方从第一下料单元28、第二下料单元29和第三下料单元30分别漏出的种子、颗粒状肥料和水;进料漏斗22的下端为向下贯通的漏料通道1;
44.储料器31的下侧还固定安装有升降器23,升降器23的升降杆21下端固定连接半圆饼状壳体18外壁,从而使升降器23带动半圆饼状壳体18上下升降。
45.半圆饼状壳体18的下端开口处沿矩形轮廓一体化设置矩形环壁15;升降杆21的向下伸出能使矩形环壁15的下端面接触到地面87;
46.半圆饼状壳体18的壳腔7内同轴心设置有回转轴13,半圆饼状壳体18的壳腔7内还设置有土块破碎轴11,土块破碎轴11的轴线与回转轴13的轴线平行;在回转轴13的轴线视角下,土块破碎轴11在回转轴13的左下方;土块破碎轴11通过轴承与半圆饼状壳体18侧壁上的轴承孔30转动配合;
47.土块破碎轴11的外壁上呈圆周阵列发散状设置有若干用于土块破碎和肥料拌匀
的尖刺体9;若干尖刺体9随土块破碎轴11同步回转时的所在高度始终高出矩形环壁15下端;土块破碎轴11的一端部同轴心一体化设置有传动齿轮10,回转轴13的外壁沿轮廓阵列分布有若干传动齿体12,传动齿轮10与回转轴13上的传动齿体12啮合;从而使回转轴13的回转在啮合传动的作用下带动传动齿轮10,从而使土块破碎轴11跟着沿自身轴线回转;
48.还包括圆弧形铲土片20,圆弧形铲土片20的圆弧轴心在回转轴13的轴线上,圆弧形铲土片20的外弧面20.1与半圆饼状壳体18的圆弧内壁面3滑动配合,圆弧形铲土片20的圆弧顺时针端为锋利铲土端16;圆弧形铲土片20的圆弧逆时针端通过圆弧推土片2一体化连接回转轴13的外壁,从而使圆弧形铲土片20随回转轴13同步运动;圆弧形铲土片20的逆时针端与圆弧推土片2的顺时针端相切;将圆弧推土片2的凹面记为圆弧推土面2.2,将圆弧推土片2的凸面记为圆弧引流面2.1;当圆弧形铲土片20的锋利铲土端16为圆弧形铲土片20的最下端,且圆弧形铲土片20的锋利铲土端16与矩形环壁15底部所在高度一致时,圆弧推土片2刚好在漏料通道1的正下方,从漏料通道1漏下的肥料颗粒在圆弧推土片2的圆弧引流面2.1的引流作用下向右侧滑落并坠落到壳腔7内的右侧部分的土块破碎轴11所在位置;
49.还包括种子转运杯6,种子转运杯6的杯体内侧为种子仓5,种子仓5内至少容纳一颗种子41,种子转运杯6的杯口6.1与半圆饼状壳体18的圆弧内壁面3滑动配合;从而使半圆饼状壳体18的圆弧内壁面3封堵种子转运杯6的杯口6.1,种子转运杯6的杯底通过连通杆8固定连接所回转轴13的外壁,从而使种子转运杯6随回转轴13同步回转,当圆弧形铲土片20的锋利铲土端16随回转轴13顺时针回转到回转轴13的轴心正下方时,种子转运杯6的杯口6.1刚好连通漏料通道1的下端,从而使漏料通道1向下漏出的种子到达种子转运杯6的种子仓5中;
50.回转轴13的轴心处同轴心设置有圆柱空心仓24,连通杆8内设沿长度方向贯通设置有导液通道4;导液通道4将圆柱空心仓24与种子仓5相互连通;导液通道4的内径小于任意一颗种子41的外径;
51.圆柱空心仓24内同轴心设置有固定空心轴17,固定空心轴17的一端通过固定件27与半圆饼状壳体18的侧壁固定连接;固定空心轴17的外壁与圆柱空心仓24的内壁滑动配合;固定空心轴17内为水暂存仓40,固定空心轴17的上下端分别设置有上下贯通的上连通孔19和下连通孔14;
52.当种子转运杯6的杯口6.1刚好连通漏料通道1的下端时,导液通道4通过上连通孔19连通水暂存仓40的上端;当种子转运杯6到达回转轴13正下方时,导液通道4通过下连通孔14连通水暂存仓40的下端。
53.还包括半圆饼状壳体18外部的回转轴驱动电机13,回转轴驱动电机54的输出轴50与回转轴13同轴心驱动连接,回转轴驱动电机54通过电机支架27与半圆饼状壳体18的外侧壁固定连接。
54.固定空心轴17壁体内还设置有气压平衡通道26;气压平衡通道26将水暂存仓40上端连通外部大气压,这样使水暂存仓40内的气压始终保持为大气压,进水和出水就会很顺畅,不会受到大气压的影响;
55.本方案的工作原理和技术进步整理如下,一种苗木种子自动化种植系统的种子种植方法:
56.初始状态设置:
57.初始状态下,圆弧形铲土片20的锋利铲土端16为圆弧形铲土片20的最下端,且圆弧形铲土片20的锋利铲土端16与矩形环壁15底部所在高度一致时,这时圆弧推土片2的圆弧引流面2.1刚好在漏料通道1的正下方;
58.具体工作过程包括如下步骤:
59.步骤一,种植车带动机械臂32以及储料器31和种植单元70水平位移至指定的种植位置,这时种植单元70在种植点位置的地面87上方;
60.步骤二,控制升降器23带动种植单元70的半圆饼状壳体18下降,直至半圆饼状壳体18下端的矩形环壁15的下端面接触到地面87,从而使地面87封堵住半圆饼状壳体18的壳腔7下端开口;
61.步骤三,这时控制第二下料单元29将储料器31内的颗粒状肥料下料到进料漏斗22中,然后下料到进料漏斗22中的颗粒状肥料通过漏料通道1向下漏出的肥料颗粒在圆弧推土片2的圆弧引流面2.1的引流作用下向右侧滑落并坠落到壳腔7内的右侧部分的土块破碎轴11下方地面87;如图8
62.步骤四,控制回转轴驱动电机54的输出轴50带动回转轴13顺时针缓慢回转,从而使圆弧形铲土片20的锋利铲土端16随回转轴13沿圆弧切割线89顺时针切割土壤90,被圆弧形铲土片20切割出来的土壤90记为已切割土块25;直至圆弧形铲土片20的锋利铲土端16随回转轴13沿圆弧切割线89顺时针切割运动到回转轴13的轴心正下方时,种子转运杯6的杯口6.1刚好也运动到连通漏料通道1的下端,这时导液通道4通过上连通孔19连通水暂存仓40的上端,如图9;这时控制第三下料单元30将储料器31内的水下料到进料漏斗22中,然后下料到进料漏斗22中的水通过漏料通道1向下漏出到种子转运杯6的种子仓5中,随后种子仓5中的水通过导液通道4继续向下流进水暂存仓40内;这时由于下连通孔14还处于被圆柱空心仓24内壁封堵状态,因此水暂存仓40内的水会累积,水暂存仓40内的水满后暂停第三下料单元30下料,与此同时第一下料单元28将储料器31内的一颗种子41下料到进料漏斗22中,随后漏料通道1向下漏出一粒种子22到达种子转运杯6的种子仓5中;
63.步骤五,随着回转轴13继续顺时针缓慢回转,圆弧推土片2的圆弧推土面2.2会沿顺时针方向推动已切割土块25,如图10,从而使已切割土块25逐渐沿顺时针向土块破碎轴11挤压;与此同时回转轴13的回转在啮合传动作用下土块破碎轴11也会跟着沿自身轴线回转,从而使土块破碎轴11外壁的尖刺体9对顺时针挤压过来的已切割土块25进行破碎打散,与此同时由于“步骤三”中土块破碎轴11所在位置已经存在肥料颗粒,因此土块破碎轴11外壁的尖刺体9对顺时针挤压过来的已切割土块25进行破碎打散的过程中会均匀的绞入肥料颗粒,从而使已切割土块25在被若干尖刺体9破碎打散的过程中均匀的拌进一定量的肥料颗粒,从而使已切割土块25逐渐变为松散的土肥混合物25.1,并且松散的土肥混合物25.1被圆弧形铲土片20和圆弧推土片2向上托起;随着回转轴13继续顺时针缓慢回转,地面87被圆弧形铲土片20铲出了一个底面为圆弧形的种植土坑93;当种子转运杯6到达回转轴13正下方时,种子转运杯6内的种子41也刚好到达种植土坑93的最下端,这时的种子41所在位置为埋种最佳位置,与此同时种子转运杯6到达回转轴13正下方时,导液通道4通过下连通孔14连通水暂存仓40的下端,这时水暂存仓40内暂时储存的水通过下连通孔14和导液通道4向下流出到种子转运杯6种子仓5中,并浸润种植土坑93底部的种子41和种子41附近土壤;如图11;
64.步骤六,控制升降器23带动种植单元70的半圆饼状壳体18上升,直至种子转运杯6向上运动到脱离种植土坑93底部的种子41,从而使已经被水浸润的种子41单独保留到种植土坑93底部;
65.步骤七,随后控制回转轴驱动电机54的输出轴50带动回转轴13逆时针回转,从而使圆弧形铲土片20随回转轴13逆时针回转到“初始状态”;圆弧形铲土片20随回转轴13逆时针的过程中,被圆弧形铲土片20和圆弧推土片2向上托起的松散的土肥混合物25.1会在重力作用下向下倒出并洒落到种植土坑93中,进而种植土坑93内已经被水浸润的种子41被松散的土肥混合物25.1填埋,进而完成了一次种子种植过程,这样有效防止已经被水浸润的种子被过度蒸发,而且填埋种子41的是松散的土肥混合物25.1,既增强了土壤肥力,又不至于“烧苗”。
66.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。