1.本发明涉及输送带技术领域,具体的说是一种智能机器人加工用具有导向组件的输送带。
背景技术:
2.输送带,又称运输带,是用于皮带输送带中起承载和运送物料作用的橡胶与纤维、金属复合制品,或者是塑料和织物复合的制品,皮带输送机在农业、工矿企业和交通运输业中广泛用于输送各种固体块状和粉料状物料或成件物品,输送带能连续化、高效率、大倾角运输,输送带操作安全,输送带使用简便,维修容易,运费低廉,并能缩短运输距离,降低工程造价,节省人力物力,输送带广泛应用于水泥、焦化、冶金、化工、钢铁等行业中输送距离较短、输送量较小的场合。
3.在渣土进行运输和使用时,通常会使用输送带进行运输,平常的输送带就是简单的进行输送,但是在需要往上输送就很不方便,而且不可能对渣土进行分批定量,容易导致使用过多,在运输,意外洒落的一端也不能够及时的进行收集,造成资源浪费。
技术实现要素:
4.针对现有技术中的问题,本发明提供了一种智能机器人加工用具有导向组件的输送带。
5.本发明解决其技术问题所采用的技术方案是:一种智能机器人加工用具有导向组件的输送带,包括机体、输送结构、升起结构、定位结构、拉动结构、固定结构和收纳结构,用于起到输送渣料并对渣土进行升高输送的所述机体的一端部安装能够对渣土进行输送的所述输送结构,在所述机体的一端安装能够对渣土进行上下运输并对渣土进行定量运输的所述升起结构,在所述机体的一端安装能够对所述输送结构进行限位的所述定位结构,在所述机体的一端安装能够对漏出的渣土进行收集的所述拉动结构,在所述拉动结构的一端安装能够方便拆卸的所述固定结构,在所述机体的一端安装能够对所需的工具进行收纳的所述收纳结构。
6.具体的,所述输送结构包括第一转轴、第一转杆、第一凹槽、第一输送带、第一凸起、第二转轴、第二转杆、第二凹槽和摇把,所述机体的内部转动连接所述第一转轴,所述第一转轴的外部固定有所述第一转杆,所述第一转杆的一端设有多个所述第一凹槽,且多个所述第一凹槽呈环形阵列关系,所述第一转杆滑动连接所述第一输送带,所述第一输送带的一端设有多个所述第一凸起,且所述第一凸起和所述第一凹槽啮合,所述机体的一端转动连接所述第二转轴,所述第二转轴的外部固定有所述第二转杆,且所述第二转杆滑动连接所述第一输送带,所述第二转杆的一端设有多个所述第二凹槽,且所述第一凸起和所述第二凹槽啮合,所述第一转轴的一端固定有所述摇把。
7.具体的,所述升起结构包括第三转轴、传动带、第三转杆、第三凹槽、第二输送带、第二凸起、第四转轴、第四转杆、第四凹槽和挡板,所述机体的一端设有所述第三转轴,所述
第三转轴的一端滑动连接所述传动带,且所述传动带的另一端滑动连接所述第二转轴,所述第三转轴的外部设有所述第三转杆,所述第三转杆的一端设有多个所述第三凹槽,且多个所述第三凹槽呈环形阵列关系,所述第三转杆的一端滑动连接所述第二输送带,所述第二输送带的一端设有多个所述第二凸起,所述机体的一端转动连接所述第四转轴,所述第四转轴的外部固定有所述第四转杆,所述第四转杆的一端设有多个所述第四凹槽,且多个所述第四凹槽呈环形阵列关系,且所述第四转杆滑动连接所述第二输送带,所述第四凹槽和所述第二凸起啮合,所述第二输送带的一端设有多个所述挡板。
8.具体的,所述定位结构包括第五凹槽、第一滑块、第一插杆、第一拉杆、第一弹簧、第六凹槽和第二插杆,所述第一转轴的一端设有多个所述第五凹槽,且多个所述第五凹槽呈环形阵列关系,所述机体的内部滑动连接所述第一滑块,所述第一滑块的一端设有所述第一插杆,且所述第一插杆和所述第五凹槽啮合,所述第一滑块的一端设有所述第一拉杆,且所述第一拉杆滑动连接所述机体,所述第一滑块的一端设有所述第一弹簧,且所述第一弹簧的另一端固定于所述机体,所述第一拉杆的一端设有所述第六凹槽,所述机体的一端滑动连接所述第二插杆,且所述第二插杆和所述第六凹槽啮合。
9.具体的,所述拉动结构包括第一收纳盒、第二拉杆、第二滑块、第一连接杆、第二弹簧、刮片和第一把手,所述机体的一端滑动连接所述第一收纳盒,所述第一收纳盒的一端滑动连接所述第二拉杆,所述第二拉杆的一端设有所述第二滑块,且所述第二滑块滑动连接所述第一收纳盒,所述第二滑块的一端设有所述第一连接杆,且所述第一连接杆滑动连接所述第一收纳盒,所述第二滑块的一端设有所述第二弹簧,且所述第二弹簧的另一端固定于所述第一收纳盒,所述第一连接杆的一端设有所述刮片,所述第一收纳盒的一端设有所述第一把手。
10.具体的,所述固定结构包括第三滑块、固定块、第三弹簧、滑杆和第一推块,所述刮片的内部滑动连接所述第三滑块,所述第三滑块的一端设有所述固定块,且所述固定块滑动连接所述第一连接杆,所述第三滑块的一端设有所述第三弹簧,且所述第三弹簧的另一端固定于所述刮片,所述第一连接杆的一端滑动连接所述滑杆,且所述滑杆和所述固定块抵触,所述滑杆的一端设有所述第一推块,且所述第一推块滑动连接所述第一连接杆。
11.具体的,所述收纳结构包括第二收纳盒、第二把手、第二推块、第四滑块、第三插杆和第四弹簧,所述机体的一端滑动连接所述第二收纳盒,所述第二收纳盒的一端设有所述第二把手,所述机体的一端滑动连接所述第二推块,所述第二推块的一端设有所述第四滑块,且所述第四滑块滑动连接所述机体,所述第四滑块的一端设有所述第三插杆,且所述第三插杆滑动连接所述第二收纳盒,所述第四滑块的一端设有所述第四弹簧,且所述第四弹簧的另一端固定于所述机体。
12.本发明的有益效果:
13.(1)本发明所述的一种智能机器人加工用具有导向组件的输送带,通过在机体的一端安装输送结构,能够更好的将渣土进行分摊输送,同时通过升起结构,能够将渣土进行均分向上运输,防止在需要渣土时不小心造成的渣土分量太多,即由于机体的内部转动连接第一转轴,第一转轴的一端固定有摇把,从而通过转动摇把带动第一转轴转动,由于第一转轴的外部固定有第一转杆,从而通过第一转轴转动带动第一转杆转动,由于第一转杆的一端设有多个第一凹槽,第一转杆滑动连接第一输送带,第一输送带的一端设有多个第一
凸起,且第一凸起和第一凹槽啮合,从而通过转动第一转杆带动第一输送带滑动,由于机体的一端转动连接第二转轴,第二转轴的外部固定有第二转杆,且第二转杆滑动连接第一输送带,第二转杆的一端设有多个第二凹槽,且第一凸起和第二凹槽啮合,从而通过转动摇把带动第一输送带滑动,以此将渣土进行分均输送,由于机体的一端设有第三转轴,第三转轴的一端滑动连接传动带,且传动带的另一端滑动连接第二转轴,从而通过第二转轴转动带动第三转轴转动,由于第三转轴的外部设有第三转杆,从而通过第三转轴的转动带动第三转杆转动,由于第三转杆的一端设有多个第三凹槽,第三转杆的一端滑动连接第二输送带,从而带动第二输送带滑动,由于机体的一端转动连接第四转轴,第四转轴的外部固定有第四转杆,第四转杆的一端设有多个第四凹槽,,且第四转杆滑动连接第二输送带,第四凹槽和第二凸起啮合,从而通过第二转轴转动带动第二输送带滑动,由于第二输送带的一端设有多个挡板,从而通过多个挡板对渣土进行定量和防止渣土向下滑动。
14.(2)本发明所述的一种智能机器人加工用具有导向组件的输送带,通过在机体的一端安装定位结构,能够更好的对输送结构进行定位,防止输送结构进行自动转动,造成渣土自行滑落,同时通过拉动结构对不小心滑落的渣土进行收集,防止造成浪费,即由于第一转轴的一端设有多个第五凹槽,机体的内部滑动连接第一滑块,第一滑块的一端设有第一插杆,且第一插杆和第五凹槽啮合,从而通过第一插杆和第五凹槽的啮合对第一转轴进行定位,从而防止第一转轴自行转动,由于第一滑块的一端设有第一拉杆,且第一拉杆滑动连接机体,从而通过拉动第一拉杆带动第一插杆移动,从而使得第一插杆和第五凹槽不再啮合,因此可使第一转轴正常转动,由于第一滑块的一端设有第一弹簧,从而通过第一弹簧的弹力使得第一插杆和第五凹槽啮合的更为牢靠,由于第一拉杆的一端设有第六凹槽,机体的一端滑动连接第二插杆,且第二插杆和第六凹槽啮合,从而通过第二插杆和第六凹槽的啮合固定第一拉杆,由于机体的一端滑动连接第一收纳盒,从而通过第一收纳盒对渣土进行收纳,由于述第一收纳盒的一端滑动连接第二拉杆,第二拉杆的一端设有第二滑块,第二滑块的一端设有第一连接杆,从而通过拉动第二拉杆带动第一连接杆,由于第一连接杆的一端设有刮片,从而通过刮片对积累成堆的渣土进行分摊,由于第二滑块的一端设有第二弹簧,从而通过第二弹簧的弹力在分摊完成后将刮片弹回,由于第一收纳盒的一端设有第一把手,从而通过第一把手将第一收纳盒取出,以此来讲渣土进行再次应用。
15.(3)本发明所述的一种智能机器人加工用具有导向组件的输送带,通过在拉动结构的一端安装固定结构,能够更好的方便对拉动结构进行拆卸和安装,便于更换和清理,同时通过收纳结构,能够更好地放置使用工具,并且可以更好地固定收纳结构防止滑落,即由于刮片的内部滑动连接第三滑块,第三滑块的一端设有固定块,且固定块滑动连接第一连接杆,从而通过固定块将刮片进行固定,由于第三滑块的一端设有第三弹簧,从而通过第三弹簧的弹力使得固定块将刮片固定的更为牢靠,由于第一连接杆的一端滑动连接滑杆,且滑杆和固定块抵触,滑杆的一端设有第一推块,在需要将刮片取下时通过推动第一推块,带动滑杆移动,从而推动固定块移动,以此可将刮片取出,由于机体的一端滑动连接第二收纳盒,第二收纳盒的一端设有第二把手,从而通过第二收纳盒对所需工具进行收纳,拉动第二把手可将第二收纳盒取出,由于机体的一端滑动连接第二推块,第二推块的一端设有第四滑块,从而推动第二推块带动第四滑块移动,由于第四滑块的一端设有第三插杆,且第三插杆滑动连接第二收纳盒,从而通过推动第二推块使得第三插杆移动,从而使得第三插杆将
第二收纳盒固定,第四滑块的一端设有第四弹簧,从而听过第四弹簧的弹力将第二收纳盒固定的更为牢靠。
附图说明
16.下面结合附图和实施例对本发明进一步说明。
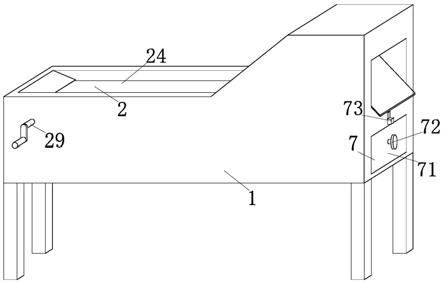
17.图1为本发明提供的智能机器人加工用具有导向组件的输送带的一种较佳实施例的整体结构的结构示意图;
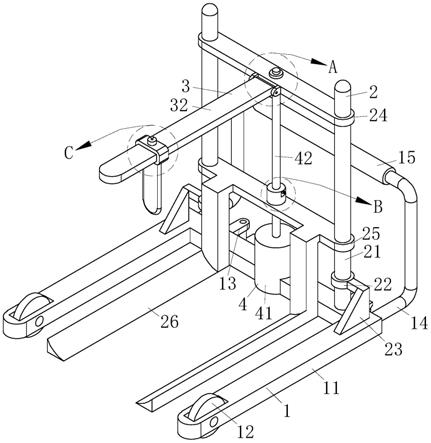
18.图2为图1所示的输送结构的结构示意图;
19.图3为图2所示的a部放大示意图;
20.图4为图1所示的机体和定位结构的连接结构示意图;
21.图5为图2所示的b部放大示意图;
22.图6为图2所示的c部放大示意图;
23.图7为图2所示的d部放大示意图。
24.图中:1、机体,2、输送结构,21、第一转轴,22、第一转杆,23、第一凹槽,24、第一输送带,25、第一凸起,26、第二转轴,27、第二转杆,28、第二凹槽,29、摇把,3、升起结构,31、第三转轴,32、传动带,33、第三转杆,34、第三凹槽,35、第二输送带,36、第二凸起,37、第四转轴,38、第四转杆,39、第四凹槽,39a、挡板,4、定位结构,41、第五凹槽,42、第一滑块,43、第一插杆,44、第一拉杆,45、第一弹簧,46、第六凹槽,47、第二插杆,5、拉动结构,51、第一收纳盒,52、第二拉杆,53、第二滑块,54、第一连接杆,55、第二弹簧,56、刮片,57、第一把手,6、固定结构,61、第三滑块,62、固定块,63、第三弹簧,64、滑杆,65、第一推块,7、收纳结构,71、第二收纳盒,72、第二把手,73、第二推块,74、第四滑块,75、第三插杆,76、第四弹簧。
具体实施方式
25.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
26.如图1
‑
图7所示,本发明所述的一种智能机器人加工用具有导向组件的输送带,包括机体1、输送结构2、升起结构3、定位结构4、拉动结构5、固定结构6和收纳结构7,用于起到输送渣料并对渣土进行升高输送的所述机体1的一端部安装能够对渣土进行输送的所述输送结构2,在所述机体1的一端安装能够对渣土进行上下运输并对渣土进行定量运输的所述升起结构3,在所述机体1的一端安装能够对所述输送结构2进行限位的所述定位结构4,在所述机体1的一端安装能够对漏出的渣土进行收集的所述拉动结构5,在所述拉动结构5的一端安装能够方便拆卸的所述固定结构6,在所述机体1的一端安装能够对所需的工具进行收纳的所述收纳结构7。
27.具体的,所述输送结构包括第一转轴21、第一转杆22、第一凹槽23、第一输送带24、第一凸起25、第二转轴26、第二转杆27、第二凹槽28和摇把29,所述机体1的内部转动连接所述第一转轴21,所述第一转轴21的外部固定有所述第一转杆22,所述第一转杆22的一端设有多个所述第一凹槽23,且多个所述第一凹槽23呈环形阵列关系,所述第一转杆22滑动连接所述第一输送带24,所述第一输送带24的一端设有多个所述第一凸起25,且所述第一凸起25和所述第一凹槽23啮合,所述机体1的一端转动连接所述第二转轴26,所述第二转轴26
的外部固定有所述第二转杆27,且所述第二转杆27滑动连接所述第一输送带24,所述第二转杆27的一端设有多个所述第二凹槽28,且所述第一凸起25和所述第二凹槽28啮合,所述第一转轴21的一端固定有所述摇把29,由于所述机体1的内部转动连接所述第一转轴21,所述第一转轴21的一端固定有所述摇把29,从而通过转动所述摇把29带动所述第一转轴21转动,由于所述第一转轴21的外部固定有所述第一转杆22,从而通过所述第一转轴21转动带动所述第一转杆22转动,由于所述第一转杆22的一端设有多个所述第一凹槽23,所述第一转杆22滑动连接所述第一输送带24,所述第一输送带24的一端设有多个所述第一凸起25,且所述第一凸起25和所述第一凹槽23啮合,从而通过转动所述第一转杆22带动所述第一输送带24滑动,由于所述机体1的一端转动连接所述第二转轴26,所述第二转轴26的外部固定有所述第二转杆27,且所述第二转杆27滑动连接所述第一输送带24,所述第二转杆27的一端设有多个所述第二凹槽28,且所述第一凸起25和所述第二凹槽28啮合,从而通过转动所述摇把29带动所述第一输送带24滑动,以此将渣土进行分均输送。
28.具体的,所述升起结构3包括第三转轴31、传动带32、第三转杆33、第三凹槽34、第二输送带35、第二凸起36、第四转轴37、第四转杆38、第四凹槽39和挡板39a,所述机体1的一端设有所述第三转轴31,所述第三转轴31的一端滑动连接所述传动带32,且所述传动带32的另一端滑动连接所述第二转轴26,所述第三转轴31的外部设有所述第三转杆33,所述第三转杆33的一端设有多个所述第三凹槽34,且多个所述第三凹槽34呈环形阵列关系,所述第三转杆33的一端滑动连接所述第二输送带35,所述第二输送带35的一端设有多个所述第二凸起36,所述机体1的一端转动连接所述第四转轴37,所述第四转轴37的外部固定有所述第四转杆38,所述第四转杆38的一端设有多个所述第四凹槽39,且多个所述第四凹槽39呈环形阵列关系,且所述第四转杆38滑动连接所述第二输送带35,所述第四凹槽39和所述第二凸起36啮合,所述第二输送带35的一端设有多个所述挡板39a,由于所述机体1的一端设有所述第三转轴31,所述第三转轴31的一端滑动连接所述传动带32,且所述传动带32的另一端滑动连接所述第二转轴26,从而通过所述第二转轴26转动带动所述第三转轴31转动,由于所述第三转轴的31外部设有所述第三转杆33,从而通过所述第三转轴31的转动带动所述第三转杆33转动,由于所述第三转杆33的一端设有多个所述第三凹槽34,所述第三转杆33的一端滑动连接所述第二输送带35,从而带动所述第二输送带35滑动,由于所述机体1的一端转动连接所述第四转轴37,所述第四转轴37的外部固定有所述第四转杆38,所述第四转杆38的一端设有多个所述第四凹槽39,,且所述第四转杆38滑动连接所述第二输送带35,所述第四凹槽39和所述第二凸起36啮合,从而通过所述第二转轴26转动带动所述第二输送带35滑动,由于所述第二输送带35的一端设有多个所述挡板39a,从而通过多个所述挡板39a对渣土进行定量和防止渣土向下滑动。
29.具体的,所述定位结构4包括第五凹槽41、第一滑块42、第一插杆43、第一拉杆44、第一弹簧45、第六凹槽46和第二插杆47,所述第一转轴21的一端设有多个所述第五凹槽41,且多个所述第五凹槽41呈环形阵列关系,所述机体1的内部滑动连接所述第一滑块42,所述第一滑块42的一端设有所述第一插杆43,且所述第一插杆43和所述第五凹槽41啮合,所述第一滑块42的一端设有所述第一拉杆44,且所述第一拉杆44滑动连接所述机体1,所述第一滑块42的一端设有所述第一弹簧45,且所述第一弹簧45的另一端固定于所述机体1,所述第一拉杆44的一端设有所述第六凹槽46,所述机体1的一端滑动连接所述第二插杆47,且所述
第二插杆47和所述第六凹槽46啮合,由于所述第一转轴21的一端设有多个所述第五凹槽41,所述机体1的内部滑动连接所述第一滑块42,所述第一滑块42的一端设有所述第一插杆43,且所述第一插杆43和所述第五凹槽41啮合,从而通过所述第一插杆43和所述第五凹槽41的啮合对所述第一转轴21进行定位,从而防止第一转轴21自行转动,由于所述第一滑块42的一端设有所述第一拉杆44,且所述第一拉杆44滑动连接所述机体1,从而通过拉动所述第一拉杆44带动所述第一插43杆移动,从而使得所述第一插杆43和所述第五凹槽41不再啮合,因此可使所述第一转轴21正常转动,由于所述第一滑块42的一端设有所述第一弹簧45,从而通过所述第一弹簧45的弹力使得所述第一插杆43和所述第五凹槽41啮合的更为牢靠,由于所述第一拉杆44的一端设有所述第六凹槽46,所述机体1的一端滑动连接所述第二插杆47,且所述第二插杆47和所述第六凹槽46啮合,从而通过所述第二插杆47和所述第六凹槽46的啮合固定所述第一拉杆44。
30.具体的,所述拉动结构5包括第一收纳盒51、第二拉杆52、第二滑块53、第一连接杆54、第二弹簧55、刮片56和第一把手57,所述机体1的一端滑动连接所述第一收纳盒51,所述第一收纳盒51的一端滑动连接所述第二拉杆52,所述第二拉杆52的一端设有所述第二滑块53,且所述第二滑块53滑动连接所述第一收纳盒51,所述第二滑块53的一端设有所述第一连接杆54,且所述第一连接杆54滑动连接所述第一收纳盒51,所述第二滑块53的一端设有所述第二弹簧55,且所述第二弹簧55的另一端固定于所述第一收纳盒51,所述第一连接杆54的一端设有所述刮片56,所述第一收纳盒51的一端设有所述第一把手57,由于所述机体1的一端滑动连接所述第一收纳盒51,从而通过所述第一收纳盒对51渣土进行收纳,由于述第一收纳盒51的一端滑动连接所述第二拉杆52,所述第二拉杆52的一端设有所述第二滑块53,所述第二滑块53的一端设有所述第一连接杆54,从而通过拉动所述第二拉杆52带动所述第一连接杆54,由于所述第一连接杆54的一端设有所述刮片56,从而通过所述刮片56对积累成堆的渣土进行分摊,由于所述第二滑块53的一端设有所述第二弹簧55,从而通过所述第二弹簧55的弹力在分摊完成后将所述刮片56弹回,由于所述第一收纳盒51的一端设有所述第一把手57,从而通过所述第一把手57将所述第一收纳盒51取出,以此来讲渣土进行再次应用。
31.具体的,所述固定结构6包括第三滑块61、固定块62、第三弹簧63、滑杆64和第一推块65,所述刮片56的内部滑动连接所述第三滑块61,所述第三滑块61的一端设有所述固定块62,且所述固定块62滑动连接所述第一连接杆54,所述第三滑块61的一端设有所述第三弹簧63,且所述第三弹簧63的另一端固定于所述刮片56,所述第一连接杆54的一端滑动连接所述滑杆64,且所述滑杆64和所述固定块62抵触,所述滑杆64的一端设有所述第一推块65,且所述第一推块65滑动连接所述第一连接杆54,由于所述刮片56的内部滑动连接所述第三滑块61,所述第三滑块61的一端设有所述固定块62,且所述固定块62滑动连接所述第一连接杆54,从而通过所述固定块62将刮片56进行固定,由于所述第三滑块61的一端设有所述第三弹簧63,从而通过所述第三弹簧63的弹力使得所述固定块62将所述刮片56固定的更为牢靠,由于所述第一连接杆54的一端滑动连接所述滑杆64,且所述滑杆64和所述固定块62抵触,所述滑杆64的一端设有所述第一推块65,在需要将所述刮片56取下时通过推动所述第一推块65,带动所述滑杆64移动,从而推动所述固定块62移动,以此可将所述刮片56取出。
32.具体的,所述收纳结构7包括第二收纳盒71、第二把手72、第二推块73、第四滑块74、第三插杆75和第四弹簧76,所述机体1的一端滑动连接所述第二收纳盒71,所述第二收纳盒71的一端设有所述第二把手72,所述机体1的一端滑动连接所述第二推块73,所述第二推块73的一端设有所述第四滑块74,且所述第四滑块74滑动连接所述机体1,所述第四滑块74的一端设有所述第三插杆75,且所述第三插杆75滑动连接所述第二收纳盒71,所述第四滑块74的一端设有所述第四弹簧76,且所述第四弹簧76的另一端固定于所述机体1,由于所述机体1的一端滑动连接所述第二收纳盒71,所述第二收纳盒71的一端设有所述第二把手72,从而通过所述第二收纳盒71对所需工具进行收纳,拉动所述第二把手72可将所述第二收纳盒71取出,由于所述机体1的一端滑动连接所述第二推块73,所述第二推块73的一端设有所述第四滑块74,从而推动所述第二推块73带动所述第四滑块74移动,由于所述第四滑块74的一端设有所述第三插杆75,且所述第三插杆75滑动连接所述第二收纳盒71,从而通过推动所述第二推块73使得所述第三插杆75移动,从而使得所述第三插杆75将所述第二收纳盒71固定,所述第四滑块74的一端设有所述第四弹簧76,从而听过所述第四弹76簧的弹力将所述第二收纳盒71固定的更为牢靠。
33.本发明在使用时,由于所述机体1的内部转动连接所述第一转轴21,所述第一转轴21的一端固定有所述摇把29,从而通过转动所述摇把29带动所述第一转轴21转动,由于所述第一转轴21的外部固定有所述第一转杆22,从而通过所述第一转轴21转动带动所述第一转杆22转动,由于所述第一转杆22的一端设有多个所述第一凹槽23,所述第一转杆22滑动连接所述第一输送带24,所述第一输送带24的一端设有多个所述第一凸起25,且所述第一凸起25和所述第一凹槽23啮合,从而通过转动所述第一转杆22带动所述第一输送带24滑动,由于所述机体1的一端转动连接所述第二转轴26,所述第二转轴26的外部固定有所述第二转杆27,且所述第二转杆27滑动连接所述第一输送带24,所述第二转杆27的一端设有多个所述第二凹槽28,且所述第一凸起25和所述第二凹槽28啮合,从而通过转动所述摇把29带动所述第一输送带24滑动,以此将渣土进行分均输送,由于所述机体1的一端设有所述第三转轴31,所述第三转轴31的一端滑动连接所述传动带32,且所述传动带32的另一端滑动连接所述第二转轴26,从而通过所述第二转轴26转动带动所述第三转轴31转动,由于所述第三转轴的31外部设有所述第三转杆33,从而通过所述第三转轴31的转动带动所述第三转杆33转动,由于所述第三转杆33的一端设有多个所述第三凹槽34,所述第三转杆33的一端滑动连接所述第二输送带35,从而带动所述第二输送带35滑动,由于所述机体1的一端转动连接所述第四转轴37,所述第四转轴37的外部固定有所述第四转杆38,所述第四转杆38的一端设有多个所述第四凹槽39,,且所述第四转杆38滑动连接所述第二输送带35,所述第四凹槽39和所述第二凸起36啮合,从而通过所述第二转轴26转动带动所述第二输送带35滑动,由于所述第二输送带35的一端设有多个所述挡板39a,从而通过多个所述挡板39a对渣土进行定量和防止渣土向下滑动,由于所述第一转轴21的一端设有多个所述第五凹槽41,所述机体1的内部滑动连接所述第一滑块42,所述第一滑块42的一端设有所述第一插杆43,且所述第一插杆43和所述第五凹槽41啮合,从而通过所述第一插杆43和所述第五凹槽41的啮合对所述第一转轴21进行定位,从而防止第一转轴21自行转动,由于所述第一滑块42的一端设有所述第一拉杆44,且所述第一拉杆44滑动连接所述机体1,从而通过拉动所述第一拉杆44带动所述第一插43杆移动,从而使得所述第一插杆43和所述第五凹槽41不再啮合,
因此可使所述第一转轴21正常转动,由于所述第一滑块42的一端设有所述第一弹簧45,从而通过所述第一弹簧45的弹力使得所述第一插杆43和所述第五凹槽41啮合的更为牢靠,由于所述第一拉杆44的一端设有所述第六凹槽46,所述机体1的一端滑动连接所述第二插杆47,且所述第二插杆47和所述第六凹槽46啮合,从而通过所述第二插杆47和所述第六凹槽46的啮合固定所述第一拉杆44,由于所述机体1的一端滑动连接所述第一收纳盒51,从而通过所述第一收纳盒对51渣土进行收纳,由于述第一收纳盒51的一端滑动连接所述第二拉杆52,所述第二拉杆52的一端设有所述第二滑块53,所述第二滑块53的一端设有所述第一连接杆54,从而通过拉动所述第二拉杆52带动所述第一连接杆54,由于所述第一连接杆54的一端设有所述刮片56,从而通过所述刮片56对积累成堆的渣土进行分摊,由于所述第二滑块53的一端设有所述第二弹簧55,从而通过所述第二弹簧55的弹力在分摊完成后将所述刮片56弹回,由于所述第一收纳盒51的一端设有所述第一把手57,从而通过所述第一把手57将所述第一收纳盒51取出,以此来讲渣土进行再次应用,由于所述刮片56的内部滑动连接所述第三滑块61,所述第三滑块61的一端设有所述固定块62,且所述固定块62滑动连接所述第一连接杆54,从而通过所述固定块62将刮片56进行固定,由于所述第三滑块61的一端设有所述第三弹簧63,从而通过所述第三弹簧63的弹力使得所述固定块62将所述刮片56固定的更为牢靠,由于所述第一连接杆54的一端滑动连接所述滑杆64,且所述滑杆64和所述固定块62抵触,所述滑杆64的一端设有所述第一推块65,在需要将所述刮片56取下时通过推动所述第一推块65,带动所述滑杆64移动,从而推动所述固定块62移动,以此可将所述刮片56取出,由于所述机体1的一端滑动连接所述第二收纳盒71,所述第二收纳盒71的一端设有所述第二把手72,从而通过所述第二收纳盒71对所需工具进行收纳,拉动所述第二把手72可将所述第二收纳盒71取出,由于所述机体1的一端滑动连接所述第二推块73,所述第二推块73的一端设有所述第四滑块74,从而推动所述第二推块73带动所述第四滑块74移动,由于所述第四滑块74的一端设有所述第三插杆75,且所述第三插杆75滑动连接所述第二收纳盒71,从而通过推动所述第二推块73使得所述第三插杆75移动,从而使得所述第三插杆75将所述第二收纳盒71固定,所述第四滑块74的一端设有所述第四弹簧76,从而听过所述第四弹76簧的弹力将所述第二收纳盒71固定的更为牢靠。
34.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
35.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。