1.本发明涉及一种自动拆垛系统,尤其涉及一种物流仓储行业的自动拆垛系统。
背景技术:
2.在将物流包装盒运送到仓库进行仓储之前,需要从托盘上卸下物流包装盒,对卸下的物流包装盒进行检查,识别物流包装盒信息和根据识别到的物流包装盒信息对物流包装盒进行分类。在现有技术中,从托盘上卸下物流包装盒以及对物流包装盒进行检查大多采用人工处理,人工处理的效率低。
技术实现要素:
3.本发明的目的旨在解决现有技术中存在的上述问题和缺陷的至少一个方面。
4.根据本发明的一个实例性的实施例,提供一种自动拆垛系统,包括:机器人,具有适于抓取物流包装盒的抓取器,用于将堆放在托盘上的物流包装盒卸下;和三维摄像机,适于识别所述物流包装盒的位置和方位,以引导所述机器人从托盘上逐个地卸下所述物流包装盒。
5.根据本发明的一个实例性的实施例,所述自动拆垛系统还包括二维摄像机,所述二维摄像机适于对被所述机器人抓取的物流包装盒进行检查,以确定所述物流包装盒是否完好。
6.根据本发明的另一个实例性的实施例,所述机器人适于在所述三维摄像机的引导下旋转被抓取的物流包装盒,使得被抓取的物流包装盒的多个表面逐个地朝向所述二维摄像机,以便对被抓取的物流包装盒的多个表面逐个地进行检查。
7.根据本发明的另一个实例性的实施例,所述机器人还适于在所述三维摄像机的引导下调节被抓取的物流包装盒的被检查的表面与所述二维摄像机之间的距离,使得被检查的表面与所述二维摄像机之间的距离等于预定的理想距离。
8.根据本发明的另一个实例性的实施例,所述机器人还适于在所述三维摄像机的引导下调节被抓取的物流包装盒的被检查的表面相对于所述二维摄像机的方位,使得被检查的表面与所述二维摄像机的光轴垂直。
9.根据本发明的另一个实例性的实施例,所述自动拆垛系统还包括读码器,所述读码器适于读取被抓取的物流包装盒的表面上的条形码,所述条形码包含所述物流包装盒的分类信息;所述机器人适于根据所述读码器读取的分类信息对所述物流包装盒进行分类,以完成所述物流包装盒的分拣。
10.根据本发明的另一个实例性的实施例,在利用所述二维摄像机对被抓取的物流包装盒的多个表面逐个地进行检查的同时,利用所述读码器对被抓取的物流包装盒的各个表面进行扫描,直至读取到所述条形码。
11.根据本发明的另一个实例性的实施例,所述二维摄像机和所述读码器位于被抓取的物流包装盒的同一侧或不同侧。
12.根据本发明的另一个实例性的实施例,所述机器人上的抓取器适于抓取不同尺寸的物流包装盒,所述三维摄像机还适于识别所述物流包装盒的尺寸;所述机器人适于根据识别到的物流包装盒的尺寸调节所述抓取器,以抓取不同尺寸的物流包装盒。
13.根据本发明的另一个实例性的实施例,所述机器人为多自由度机器人,可实现被抓取的物流包装盒在三个不同方向上的平移和绕三个不同方向的轴线的旋转,所述三个不同方向彼此垂直。
14.在本发明的前述各个实例性的实施例中,自动拆垛系统能够自动地实现物流包装盒的卸载、检验、识别和分拣操作,节省了人工成本,极大地提高了物流包装盒入库效率。
15.通过下文中参照附图对本发明所作的描述,本发明的其它目的和优点将显而易见,并可帮助对本发明有全面的理解。
附图说明
16.图1显示根据本发明的一个实例性的实施例的自动拆垛系统的示意图。
具体实施方式
17.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在说明书中,相同或相似的附图标号指示相同或相似的部件。下述参照附图对本发明实施方式的说明旨在对本发明的总体发明构思进行解释,而不应当理解为对本发明的一种限制。
18.另外,在下面的详细描述中,为便于解释,阐述了许多具体的细节以提供对本披露实施例的全面理解。然而明显地,一个或多个实施例在没有这些具体细节的情况下也可以被实施。在其他情况下,公知的结构和装置以图示的方式体现以简化附图。
19.根据本发明的一个总体技术构思,提供一种自动拆垛系统,包括:机器人,具有适于抓取物流包装盒的抓取器,用于将堆放在托盘上的物流包装盒卸下;和三维摄像机,适于识别所述物流包装盒的位置和方位,以引导所述机器人从托盘上逐个地卸下所述物流包装盒。
20.图1显示根据本发明的一个实例性的实施例的自动拆垛系统的示意图。
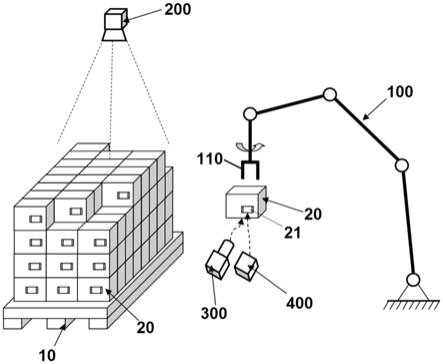
21.如图1所示,在图示的实施例中,该自动拆垛系统主要包括:机器人100和三维摄像机200。机器人100具有适于抓取物流包装盒20的抓取器110,用于将堆放在托盘10上的物流包装盒20卸下。三维摄像机200适于识别物流包装盒20的位置和方位,以引导机器人100从托盘10上逐个地卸下物流包装盒20。
22.如图1所示,在图示的实施例中,自动拆垛系统还包括二维摄像机300,该二维摄像机300适于对被机器人100抓取的物流包装盒20进行检查,以确定物流包装盒20是否完好。
23.如图1所示,在图示的实施例中,机器人100适于在三维摄像机200的引导下旋转被抓取的物流包装盒20,使得被抓取的物流包装盒20的多个表面逐个地朝向二维摄像机300,以便对被抓取的物流包装盒20的多个表面逐个地进行检查。
24.如图1所示,在图示的实施例中,机器人100还适于在三维摄像机200的引导下调节被抓取的物流包装盒20的被检查的表面与二维摄像机300之间的距离,使得被检查的表面与二维摄像机300之间的距离等于预定的理想距离,即使得被检查的表面位于二维摄像机300的焦平面上。这样,可以确保二维摄像机300能够捕捉到清晰的图像,从而能够对物流包
装盒20进行稳定的检查。
25.如图1所示,在图示的实施例中,机器人100还适于在三维摄像机200的引导下调节被抓取的物流包装盒20的被检查的表面相对于二维摄像机300的方位,使得被检查的表面与二维摄像机300的光轴垂直。
26.如图1所示,在图示的实施例中,自动拆垛系统还包括读码器400,该读码器400适于读取被抓取的物流包装盒20的表面上粘贴的条形码21,该条形码21包含物流包装盒20的分类信息。机器人100适于根据读码器400读取的分类信息对物流包装盒20进行分类,以完成物流包装盒20的分拣。
27.如图1所示,在图示的实施例中,在利用二维摄像机300对被抓取的物流包装盒20的多个表面逐个地进行检查的同时,利用读码器400对被抓取的物流包装盒20的各个表面进行扫描,直至读取到条形码21。
28.如图1所示,在图示的实施例中,二维摄像机300和读码器400位于被抓取的物流包装盒20的同一侧或不同侧。
29.如图1所示,在图示的实施例中,机器人100上的抓取器110适于抓取不同尺寸的物流包装盒20,三维摄像机200还适于识别物流包装盒20的尺寸。机器人100适于根据识别到的物流包装盒20的尺寸调节抓取器110,以抓取不同尺寸的物流包装盒20。这样,自动拆垛系统可适用于不同尺寸的物流包装盒的入库处理。
30.如图1所示,在图示的实施例中,机器人100为多自由度机器人,可实现被抓取的物流包装盒20在三个不同方向上的平移和绕三个不同方向的轴线的旋转,前述三个不同方向彼此垂直。
31.本领域的技术人员可以理解,上面所描述的实施例都是示例性的,并且本领域的技术人员可以对其进行改进,各种实施例中所描述的结构在不发生结构或者原理方面的冲突的情况下可以进行自由组合。
32.虽然结合附图对本发明进行了说明,但是附图中公开的实施例旨在对本发明优选实施方式进行示例性说明,而不能理解为对本发明的一种限制。
33.虽然本总体发明构思的一些实施例已被显示和说明,本领域普通技术人员将理解,在不背离本总体发明构思的原则和精神的情况下,可对这些实施例做出改变,本发明的范围以权利要求和它们的等同物限定。
34.应注意,措词“包括”不排除其它元件或步骤,措词“一”或“一个”不排除多个。另外,权利要求的任何元件标号不应理解为限制本发明的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。