1.本发明涉及一种利用天线阵列对被测设备进行测量的方法。
背景技术:
2.在现有技术中,已知的测量系统和方法是使用算法将所进行的近场(nf)天线测量结果转化为远场(ff)代表。由于进行了相应的变换,这些算法也称为nf/ff算法。
3.此外,已知平面波合成的概念,其使用具有多个天线元件的天线阵列,这些天线元件被单独控制,使得它们各自的信号在近场(即近距离)中叠加到平面波(远场条件)上。这些天线阵列也被称为平面波转换器(pwc)。因此,必须优化天线激励的各个权重,特别是幅度和相位系数,以确保近场中的平面波。
4.此外,为了获得准确的测量结果,需要一个均匀的静区。这可以通过增加由天线阵列提供的天线元件的密度来实现,同时优化天线激励的各个权重。当用于测试目的的信号频率增加时,这一点尤为重要,因为各个天线元件之间的间距最好是各自所用波长的一小部分,优选低于波长的一半。由于现代通信设备使用更高频率的通信标准,这在当今变得更加重要。
5.此外,包括大量天线元件的天线阵列也有助于增加相应静区的尺寸。这反过来又简化了被测大型设备的测试,因为它们需要一个适当尺寸的静区。
6.然而,天线阵列内的天线元件数量不能无限制地增加,因为这将增加天线阵列的成本和整体设置的复杂性,从而导致不切实际的测量系统。
7.因此,需要一种对被测设备进行测量的方法,以低成本的方式确保准确的测量结果。
技术实现要素:
8.本发明提供了一种利用天线阵列对被测设备进行测量的方法。该方法包括以下步骤:
9.‑
提供包括多个天线元件的天线阵列,
10.‑
提供被配置为空中通信(ota)的测试设备,
11.‑
将所述被测设备定位在第一测试位置,从而在所述被测设备与所述天线阵列之间建立第一相对距离,
12.‑
当所述被测设备与所述天线阵列之间具有所述第一相对距离时,进行第一空中测量,从而得到第一测量结果,
13.‑
移动所述天线阵列和/或所述被测设备,从而在所述被测设备与所述天线阵列之间建立第二相对距离,所述第二相对距离特别不同于所述第一相对距离,并且
14.‑
当所述被测设备与所述天线阵列之间具有所述第二相对距离时,进行第二空中测量,从而得到第二测量结果,
15.其中建立所述被测设备位于其中的静区,并且其中所述静区的尺寸是从所述第一
测量结果和所述第二测量结果相关联的至少两个传递函数的组合得出的。
16.此外,本发明提供了一种用于对被测设备进行测量的测量系统。该测量系统包括具有多个天线元件的天线阵列和配置为空中通信的被测设备。天线阵列和/或被测设备彼此能够移动,使得测量系统提供至少两种不同的测试设置,所述测试设置对应于被测设备和天线阵列之间的不同相对距离。测量系统配置为在不同的测试设置中进行测量,以获得相应的测量结果。测量系统还被配置成建立静区,所述被测设备位于所述静区中。静区的尺寸是从测量系统的不同测试设置中获得的相应测量结果相关联的至少两个传递函数的组合得出的。
17.因此,即使不增加测量系统,特别是天线阵列的成本和复杂性,也可以提高测量的精度和/或静区的尺寸。天线阵列和被测设备之间的相对距离在执行的至少两个不同测量期间进行调整,其中在不同测量期间,即在不同的测试设置中获得的各个测量结果彼此组合以获得单独静区。因此,可以扩大静区的尺寸和/或提高测量精度。
18.本发明的主要思想对应于将在至少两个不同的相对位置,即天线阵列和被测设备的相对位置和/或方向上获得的测量结果相互组合,以便从至少两个不同的物理测量结果中获得单个(虚拟)静区。换句话说,被测设备和天线阵列之间的至少两个传递函数(在数学上描述了相应测试设置中的信号传输)相互组合,以便从相应的测量结果获得(数学上组合的)静区。因此,数学上组合的静区对应于虚拟静区。
19.与此相反,现有技术中已知通过使用多探针系统而不是将在被测设备周围移动的单探针系统来执行相应的测量,以提高采样率。然而,这些技术的目的是增加测量系统的采样率,而不是改进为测试目的提供的相应静区。因此,现有技术中已知的技术并没有将各个测量结果以数学的方式组合起来,以实现(虚拟)静区,即数学上组合的静区。
20.实际上,本发明涉及到天线阵列的几个,特别是全部天线元件的使用,从而使这些天线元件(探针)一起作为单个探针使用。此外,由于至少两个不同测试设置之间的相对移动,天线阵列相对于被测设备具有两个不同的相对位置,从而在两个不同的相对位置上获得测量结果。与测量结果相关联的波虚拟地组合或更确切地说在数学上进行了组合,即通过相应的传递函数,使得这些波(虚拟地)相互干扰,从而形成了限定静区的平面波。
21.换句话说,与不同测试设置相关联的波由与相应测量结果相关联的相应传递函数进行数学描述。这些传递函数相互组合,产生相应波的(虚拟)干扰,该干扰由传递函数的组合在数学上表示,从而获得作为传递函数的数学组合结果的虚拟静区。
22.一般来说,天线阵列可以对应于平面波转换器,该平面波转换器被配置为在被测设备的位置提供远场条件(平面波),即使被测设备和天线阵列彼此之间的距离低于弗劳恩霍夫(fraunhofer)距离。
23.一个方面规定,至少两个传递函数的组合是由在第一和第二相对距离处提供的目标场构成的,其中目标场一起组合为平面波。一般来说,通过适当地控制天线阵列的天线元件来获得相应的目标场(分布)。实际上,为了获得相应的目标场,控制天线激励的相应权重,特别是幅度和相位系数。对于每个相对距离,在目标静区中生成相应的目标场。所产生的相应目标场设计位使得它们的组合产生尽可能接近目标静区内平面波的波锋。因此,在第一测试设置或第二测试设置中使用的各个目标场不必已经自己提供平面波。事实上,它们的组合在静区提供远场特性就足够了。
24.天线阵列和/或被测设备彼此相对移动,使得静区的尺寸虚拟增大。由于在不同相对距离处提供了两个不同的目标场,所述目标场相互组合以获得尺寸增大的静区,因此静区的尺寸虚拟增大。因此,静区的增大的尺寸是虚拟的,因为相应尺寸是通过将至少两个不同的测试设置所获得的相应测量结果进行数学组合而获得的。静区尺寸的虚拟增大对应于天线阵列尺寸的虚拟扩展。
25.根据另一方面,在被测设备与天线阵列之间的每个相对距离期间建立相应静区。单个静区与单个目标场关联。单个静区的相应尺寸可能不同于通过数学组合相应传递函数获得的(虚拟)静区的尺寸。换句话说,(虚拟)静区是通过组合在相应测试设置处,即当建立被测设备和天线阵列之间的至少两个不同的相对距离时提供的至少两个单个静区而获得的。
26.特别是,对单个静区中的至少一个进行适配,从而提供大的均匀的静区。例如,在单个静区的相应边缘处执行对至少一个单个静区的适配。因此,可以轻松地组合在不同测试设置中提供的多个静区,以便提供具有较大尺寸且均匀的整体静区,即虚拟静区。
27.此外,天线阵列和/或被测设备可以相对于彼此移动,使得天线阵列的天线元件的数量虚拟地增加。换句话说,通过以一定的方式移动物理天线阵列和/或被测物理设备,增加天线阵列的天线元件的密度。天线元件的密度的虚拟增加是通过组合在不同相对位置提供的相应目标场,即相关联的传递函数来实现的。
28.通过相互移动天线阵列和/或被测设备,可以提高测量的精度。由于相应的相对移动可能会导致天线元件的数量虚拟增加,因此天线阵列的天线元件的相应密度增加,由于(虚拟)增加了天线元件的数量,因此又导致了更高的测量精度。
29.再次,由于组合在与天线阵列与被测设备之间的不同相对距离相关联的两个不同测试设置中获得的测量结果,天线元件的数量虚拟增加。这清楚地表明,在至少两个不同测试设置中获得的测量结果被一起使用,即数学组合,以便获得与(虚拟)增加的天线元件数量或更确切地说,与(虚拟地)扩大的天线元件密度相关联的单一输出。
30.特别地,被测设备与天线阵列之间的第二相对距离对应于相对于第一相对距离的互补位置。当相对于彼此移动天线阵列和/或被测设备时,考虑天线阵列的各个天线元件的结构和/或布置,从而增加天线元件的密度。为了获得增加的天线元件的密度,必须考虑天线元件彼此之间的距离。
31.特别地,天线阵列和/或被测设备沿x轴和/或y轴横向位移。例如,天线阵列由沿x轴和y轴跨越的主平面限定。因此,天线阵列可以对应于二维天线阵列,使得天线阵列的所有天线元件位于一个平面,即天线阵列的主平面。
32.然而,天线阵列还可对应于三维天线阵列,其包括以三维结构布置的天线元件。尽管如此,天线阵列具有主平面,该主平面沿着用于使天线阵列和/或被测设备相对于彼此横向位移的轴线跨越。实际上,与天线阵列的尺寸相比,三维天线阵列的天线元件仅在z方向上位移最小。
33.天线阵列和/或被测设备可以横向位移天线阵列的相邻天线元件之间的距离的一半。这确保在至少两个不同的测试设置下获得的测量结果可以轻松地相互组合。此外,天线元件的分布,即虚拟增加的天线元件的分布是均匀的。
34.另一个方面在于,进行平面波合成,即使相应的相对距离低于弗劳恩霍夫距离,也
能提供远场条件。弗劳恩霍夫距离对应于区分远场条件和近场条件的距离。如上所述,各个目标场可能不提供远场条件,但它们的组合却提供了远场条件。
35.例如,与天线元件相关联的信号被加权,特别是被不同地加权。天线元件处的相应信号可以例如通过幅度和相位系数而被不同地加权,从而获得远场条件;至少在组合中是如此。事实上,天线激励被适当地加权,从而获得相应的目标场。
36.根据另一方面,移动天线阵列和/或被测设备,从而在被测设备和天线阵列之间建立第三相对距离,其中当在被测设备和天线阵列之间提供所述第三相对距离时,执行第三空中测量,从而获得第三测量结果。因此,可以提供两个以上不同的测试设置、两个以上不同的测量结果或两个以上不同的目标场,并且在数学上彼此组合以便获得相应的组合目标场,即(虚拟)静区。特别地,使用两种以上不同的测试设置来适当地增加静区的尺寸。
37.例如,将被测设备设置为传输模式。因此,相应的测量与表征被测设备的空中(ota)特性有关。
38.通常,测量系统被配置成执行上述方法。
附图说明
39.当结合附图时,通过参考以下详细描述来更好地理解所要求保护的主题的上述方面和优点时,将更容易理解所要求保护的主题的上述方面和优点。在这些附图中:
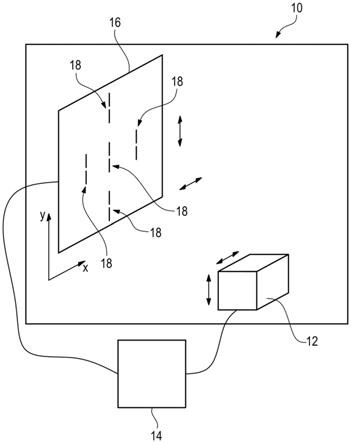
40.图1示意性地示出了根据本发明的测量系统;
41.图2示出了一示意性概图,其示出了根据本发明的第一实施例的对被测设备进行测量的方法;以及
42.图3示出了一概图,示出了说明根据本发明的第二实施例的对被测设备进行测量的方法。
具体实施方式
43.下面结合附图阐述的详细描述(其中相同的附图标记指代相同的元件)旨在作为对所公开的主题的各种实施例的描述,而不旨在仅表示实施例。在本公开中描述的每个实施例仅被提供作为示例或说明,而不应被解释为比其他实施例优选或有利。本文提供的说明性示例并非旨在穷举或将所要求保护的主题限制为所公开的精确形式。
44.就本公开而言,例如,短语“a、b和c中的至少一个”是指(a)、(b)、(c)、(a和b)、(a和c)、(b和c)或(a、b和c),包括当列出多于三个元素时所有进一步可能的排列。换句话说,术语“a和b中的至少一个”通常指“a和/或b”,即单独的“a”、单独的“b”或“a和b”。
45.在图1中,示出了一种用于进行空中测量的测量系统10。
46.测量系统10包括腔室11,例如消声室或屏蔽腔室,被测设备12位于其中,以便进行测试。
47.此外,测量系统10包括测量设备14,该测量设备14也以信号传输的方式与天线阵列16连接,该天线阵列16也位于腔室11中。
48.天线阵列16包括若干天线元件18,这些元件位于由x轴和y轴跨越的平面内。相应的平面对应于天线阵列16的主平面。
49.被测设备12可以对应于一般被配置为与其他实体进行空中通信的通信设备。例
如,被测设备12可以涉及用户设备,例如移动电话、平板电脑或任何其他通信设备。然而,被测设备12也可以涉及基站。
50.如图1所示,天线阵列16与测量设备14连接,使得由天线阵列16,特别是其天线元件18接收到的信号被转发到测量设备14,以进行分析。
51.此外,测量设备14还可以包括信号发生器,该信号发生器被配置为产生要通过天线阵列16,特别是其天线元件18发送的信号,该信号由被测设备12接收。
52.相应地,被测设备12也可以包括与测量设备14的连接。
53.例如,被测设备12从测量设备14接收控制信号。此外,被测设备12还可以将接收到的信号转发到测量设备14,以便进行评估。
54.被测设备12和天线阵列16彼此相对定位,以便在被测设备12和天线阵列16之间建立第一相对距离。因此,被测设备12位于第一测试位置,其中被测设备12和天线阵列16之间的第一相对距离被保证。
55.该相应设置对应于第一测试设置,在该设置中,可以在空中进行第一测量,以获得第一测量结果。这些测量结果与通过适当地控制天线阵列16的天线元件18而获得的第一目标场(分布)相关联。
56.例如,为了获得相应的目标场,控制天线激励的相应权重,特别是幅度和相位系数。
57.通常,如图1中箭头所示,天线阵列16和/或被测设备12可以相对移动,从而可以达到被测设备12和天线阵列16之间的另一相对距离。然后,可以执行另一测量,从而获得进一步的测量结果。
58.在下文中还将参考图2和图3对此进行更详细的说明。
59.在图2和图3中粗线所示的第一个测试设置中,建立了第一单个静区。
60.如图2所示,被测设备12或天线阵列16沿其中一个轴(即x轴或y轴)横向移动,以达到图2和图3中的细线所示的第二测试设置。
61.实际上,仅示出了天线阵列16的天线元件18,其相对于被测设备12沿x轴位移。然而,相应的位移可能仅来自天线阵列16的移动、被测设备12的移动或更确切地说是天线阵列16和被测设备12的组合移动。
62.在图2所示的具体实施例中,第二设置与第一设置的不同之处在于发生了沿x轴的相对位移,其中相对位移x对应于天线阵列16的相邻天线单元18之间距离d的一半,即x=d/2,如图2所示。
63.实际上,被测设备12与天线阵列16之间的第二相对距离可以对应于相对于第一相对距离的互补位置。相对移动考虑了天线阵列16的结构,特别是各个天线单元18的布置,例如它们之间的距离。如上所述,相应的横向位移可对应于相邻天线单元18之间距离的一半。
64.在该第二测试设置中,为了获得第二测量结果,在空中进行第二测量。第二测试设置对应于与第二测试设置中的天线阵列16的相应目标场相关联的另一个单个静区。
65.在至少两个测试设置中获得的各个测量结果,特别是与测量结果相关的传递函数,在数学上彼此组合,从而提供虚拟增加的天线元件18的密度。
66.换句话说,由于天线阵列16和被测设备12之间在x方向上的相对横向位移,天线阵列16的阵列密度在x方向上虚拟增加了一倍,从而产生用于至少两个测试设置的相应传递
函数。这至少两个传递函数在数学上彼此组合,从而虚拟地提高天线阵列16的密度。
67.由于天线元件18的密度较高,因此可以提高测量的精度,即通过相对于彼此移动天线阵列16和/或被测设备12。
68.如上所述,这是因为在不同的测试设置中获得的各个测量结果彼此组合,特别是与测量结果相关联的传递函数。因此,不同的测量结果不用于评估处于不同位置的被测设备12的特性,而是用于组合与各个测试设置相关联的天线阵列16的各个目标场。
69.换句话说,相应静区的尺寸从至少两个传递函数的组合得出,这些函数与在不同测试设置下获得的相应测量结果相关联。
70.至少两个传递函数与在相应测试设置处提供的目标场相关联。相应目标场一起组合成平面波,从而形成静区。但是,在第一测试设置或第二测试设置下的相应目标场不一定必须提供平面波。
71.通常,每个目标场可以对应于单个静区,产生至少两个不同的单个静区,将所获得的至少两个不同的单个静区彼此组合以便获得静区。
72.通过组合单个静区,可以对单个静区中的至少一个进行适配,从而可以提供大的均匀的静区。该适配通常应用于单个静区的边缘,以减少任何边界效应。
73.因此,图2示出了天线阵列16和被测设备12的相对移动,以增加静区的尺寸。事实上,由于在不同的相对位置(即不同的测试设置)的连续测量的组合,相对位移在限定的尺寸中产生了虚拟x倍大的天线阵列16。
74.对于每个相对位置,静区中的目标场可能不是平面波。但是,然后针对每个相对位置优化天线阵列16的系数,即天线激励,使得在各个测试设置中由天线阵列16生成的各个目标场的组合尽可能接近目标静区中的平面波。
75.在图3中,示出了一个替代实施例,该实施例说明了天线阵列16和被测设备12之间的相对移动是在x方向和y方向上进行的。
76.因此,天线阵列16的尺寸在两个方向上都虚拟扩展,从而产生更大尺寸的静区。
77.两个方向上的相应移动可以在第一测试设置和第二测试设置之间进行,使得两个测试设置之间的相对移动对应于两个不同方向上的移动。
78.另外,相对移动可以对应于三种不同的测试设置,使得第二测试设置涉及在第一方向上的移动,例如x方向或y方向,而第三测试设置对应于从第二测试设置开始在两个方向中的另一个方向上的运动。因此,天线阵列16和/或被测设备12可以被移动多次,从而在它们之间建立两个以上不同的相对距离。在每次移动之后,可以到达相应的测试设置,在该测试设置处执行相应的测量,以获得与相对位置或确切地说是相应测试设置的相应目标场相关联的测量结果。
79.因此,在天线阵列16和被测设备12之间的两个不同的相对距离上进行至少两个不同的测量,这些测量在数学上相互组合,以便虚拟地增加天线阵列16的天线元件18的数量和/或增加静区的尺寸。
80.在图3的实施例中,d1为天线元件18在y方向上的间距,d2为天线元件18在x方向上的间距。如图3所示,第二测试设置对应于和原始位置,即第一测试设置相比的相对移动,在y方向上移动d1,在x方向上移动2*d2。
81.相对移动可以通过单体的相对移动来建立,仅导致两种不同的测试设置,或者导
致几种不同的测试设置,即对应于原始测试设置的第一测试设置,对应于沿x方向或y方向的相对位移的第二测试设置,和对应于沿其余方向的相对位移的第三测试设置。
82.根据另一示例,如果d是二维天线阵列16中相邻天线元件18之间的间距,通过考虑三个测量的线性组合,一个是天线阵列16处于原始位置,两个分别是在x方向上的位移d/2和在y方向上的位移d/2,可以创建静区,该静区相当于由具有两倍密度的天线元件18或探针的2d天线阵列16创建的静区。
83.通常,在两种情况下都可以通过组合与不同测试设置中的各个目标场关联的相应传递函数来实现。
84.此外,相应的各个目标场相互组合,从而即使各个目标场不提供远场条件,但总的来说也能得到远场条件。
85.如上所述,与各个目标场相关联的传递函数的数学组合导致尺寸增大的虚拟静区,或者说是天线元件18密度增大的天线阵列17。
86.在任何情况下,由于较大的被测设备12可以由测量系统10进行测试和/或确保较高的精度,因此可以改进由测量系统10进行的测量。
87.因此,在有限地增加天线阵列16即平面波合成阵列的成本和复杂度的情况下,能够提高测量精度或静区的尺寸。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

