1.这里所公开的技术属于一种与移动体的控制装置相关的技术领域。
背景技术:
2.目前,国家正在推进自动驾驶系统的开发,安装于移动体的硬件几乎所有都是由电子控制的。特别是自动驾驶需要在考虑了乘车人员的乘坐舒适性和周围环境的安全性的基础上进行各硬件的控制。
3.例如,专利文献1所述的电子控制装置具有:第一运算部和第二运算部,它们在安全性方面具有互不相同的特征;第一预测部和第二预测部,它们分别根据第一运算部和第二运算部的运算结果预测车辆将来的状态;评价部,其根据表示已预测出的将来状态的量,评价针对第一运算部和第二运算部的运算结果的安全性;以及选择部,其根据评价部的结果,将至少满足安全性要件的运算结果作为最终运算结果输出。
4.专利文献1:日本公开专利公报特开2016
‑
192010号公报
技术实现要素:
5.-发明要解决的技术问题-
6.像专利文献1那样,在预测移动体(车辆)的将来的状态并控制各硬件时,要设定对各硬件的控制量(燃料的喷射量、制动器的油压等)以实现已预测出的将来的状态。但是,当硬件因老化等而发生了不良现象时,靠设定的控制量有时无法实现成为目标的将来的状态(驱动扭矩或制动距离)。
7.当移动体采用根据驾驶员的意愿执行的手动驾驶而行驶时,也能够根据驾驶员的经验等在一定程度上把握发生了不良现象的部位,并通过该驾驶员的操作来应对。但是,在移动体采用对驾驶员的操作进行辅助的辅助驾驶或采用不需要驾驶员操作的自动驾驶而行驶时,则难以介入基于驾驶员的经验等的判断,因此难以通过确定不良现象发生部位或通过驾驶员的操作进行应对。
8.通常是通过反馈控制来补偿硬件的实际输出与目标输出的偏差。但是,由于该偏差的原因尚不明确,因此有可能无法进行适当的补偿。为了明确原因,需要一边适当地变更对硬件的控制内容,一边追踪该硬件输出的变化,但在移动体的工作过程中难以用实际的硬件进行验证。
9.这里所公开的技术能够确定硬件的不良现象,适当地控制移动体工作,不会对移动体的工作带来不良影响。
10.-用于解决技术问题的技术方案-
11.为了解决上述技术问题,这里所公开的技术以安装有硬件的移动体的控制装置为对象,构成为包括:控制部、第一相同认定模型、第二相同认定模型、标准值计算部、调节部;所述控制部实际控制所述硬件;所述第一相同认定模型包括第一硬件模型及第一软件模型,所述第一硬件模型是将所述硬件的动态特性模型化后得到的,所述第一软件模型被输
入与所述控制部相同的输入信息,并且能够对所述第一硬件模型执行与所述控制部对所述硬件进行的处理相同的处理;所述第二相同认定模型包括第二硬件模型及第二软件模型,所述第二硬件模型是将所述硬件的动态特性模型化后得到的,所述第二软件模型被输入与所述控制部相同的输入信息,并且能够对所述第二硬件模型执行与所述控制部对各所述硬件进行的处理相同的处理;所述标准值计算部使用所述第一相同认定模型计算相对于所述输入信息的作为所述硬件的标准的输出值;所述调节部,其根据标所述标准输出值及所述硬件的实际输出值,更新所述第二硬件模型中硬件模型的动态特性,以便使通过所述第二软件模型的处理得到的所述第二硬件模型的输出值符合所述硬件的实际输出值。
12.根据该构成方式,能够使用第一相同认定模型来计算与硬件的目标输出值对应的标准输出值。第二相同认定模型的第二硬件模型通过调节部更新,以便使该标准输出值成为硬件的实际输出值。调节部的更新信息为表示与第一相同认定模型的第一硬件模型不同的部分的信息,因此能够基于该更新信息来确定实际产生不良现象的部位。这样一来,根据所确定的不良现象部位来变更对硬件的控制内容,就能够使硬件的输出值接近标准输出值,从而能够使移动体的控制状态尽可能接近所需要的控制状态。
13.由于该控制并不使用实际的硬件,而是使用将该硬件模型化而得到的模型,因此即使在移动体的工作过程中也不会对该移动体的工作造成不良影响。
14.因此,能够确定硬件的不良现象,适当地控制移动体工作,不会对移动体的工作带来不良影响。
15.在所述移动体的控制装置的一实施方式中还包括实验模型以及实验部:所述实验模型具有第三硬件模型和第三软件模型。所述第三硬件模型是将所述硬件的动态特性模型化后得到的,所述第三软件模型被输入与所述输入信息不同的改变信息,且能够对所述第三硬件模型执行与所述控制部对所述硬件进行的处理相同的处理;所述实验部变更所述输入信息所表示的条件而生成改变信息,并且根据该改变信息所表示的条件,通过所述第三软件模型对所述第三硬件模型进行处理;所述调节部构成为:在更新所述第二硬件模型时,对所述第三硬件模型进行同样的更新,所述实验部计算控制所述第三硬件模型的特定控制条件,以便使根据所述改变信息所表示的条件由所述第三软件模型对所述第三硬件模型进行处理时得到的输出成为所述标准值计算部计算出的输出值。
16.根据该构成方式,实验模型的第三硬件模型进行与第二硬件模型同样的更新,因此第三硬件模型反映了实际硬件的动态特性。通过由实验部使用实验模型进行模拟,能够计算出对应各种环境的控制条件。例如,通过对使外部气温相对于实际的外部气温极高或极低时硬件的输出值变得如何的情况进行模拟,在移动体暴露于这样的环境时,能够将硬件的控制条件设定为适当的内容(特定控制条件的内容)。例如,当硬件是驱动系统硬件时,能够通过实验部事先预测该驱动系统硬件停止工作的环境条件。这样一来,能够在预测到移动体暴露在满足该环境条件的环境中时,向驾驶员通知该情况,从而能够抑制移动体的紧急停止。其结果是,能够更适当地控制对移动体工作。
17.在所述一实施方式中,也可以构成为:还包括存储部,所述存储部存储由所述实验部计算出的所述特定控制条件,所述控制部在所述输入信息所表示的条件与所述改变信息所表示的条件相类似时,从所述存储部读出与所述改变信息所表示的条件相对应的所述特定控制条件,根据该特定控制条件控制所述硬件。
18.根据该构成方式,能够通过实验部事先计算出针对各种环境的硬件的特定控制条件,并将该特定控制条件积累起来。在实际的环境与实验部在模拟中设想的环境相类似时,只需要读出已积累起来的特定控制条件,就能够适当地控制移动体工作。
19.在所述移动体的控制装置中,也可以构成为:所述硬件包括发动机,所述标准值计算部计算表示成为标准的发动机输出的标准发动机参数,所述调节部调节所述第二硬件模型中与所述发动机相关联的模型的动态特性,以便使使用所述第二相同认定模型计算出的验证发动机参数符合通过所述控制部的处理得到的实际的发动机参数即实际发动机参数。
20.也就是说,由于发动机主要是承担驱动系统的硬件,所以在移动体的工作控制中,发动机应为特别适当地控制的硬件。发动机由多个阀、燃料喷射器、火花塞等多个部件构成,存在多个不良现象的原因,因此如果用实际的硬件来验证标准发动机参数与实际发动机参数的偏差的原因,则需要花费时间来确定不良现象。因此,当硬件为发动机时,能够更适当地发挥以下效果:能够确定硬件的不良现象,适当地控制移动体工作,不会对移动体的工作带来不良影响。
21.在所述移动体的控制装置中,也可以构成为:所述硬件包括制动器,所述标准值计算部计算成为标准的与制动相关联的参数即标准制动参数,所述调节部调节所述第二硬件模型中的与所述制动器相关联的模型的动态特性,以便使使用所述第二相同认定模型计算出的验证制动参数符合通过所述控制部的处理得到的实际的制动参数即实际制动参数。
22.也就是说,制动器包括很多部件,存在多个不良现象的原因,因此如果用实际的硬件来验证标准制动力与实际制动力的偏差的原因,则需要花费时间来确定不良现象。因此,当硬件为制动器时,能够更适当地发挥以下效果:能够确定硬件的不良现象,适当地控制移动体工作,不会对移动体的工作带来不良影响。
附图说明
23.图1示出安装有实施方式所涉及的控制装置的车辆的控制系统的构成例。
24.图2为示出控制系统的通信网的简图。
25.图3为示出驱动系统和制动系统的构成的简图。
26.图4为示出安装于运算装置的模型的方框图。
27.图5示出由调节部进行模型的更新处理的流程图,其表示更新发动机的模型的情况。
28.图6示出由调节部进行模型的更新处理的流程图,其表示更新制动器的模型的情况。
29.图7示出实验部的第一符合模拟的流程图,其表示获得发动机的控制参数的情况。
30.图8示出实验部的第二符合模拟的流程图,其表示获得发动机的控制参数的情况。
31.-符号说明-
32.1-硬件;10-控制器(控制装置);30-发动机;50-制动器;100-控制部;110-第一相同认定模型;111-第一硬件模型;112-第一软件模型;120-第二相同认定模型;121-第二硬件模型;122-第二软件模型;130-实验模型;131-第三硬件模型;132-第三软件模型;141-标准值计算部;142-调节部;143-实验部;144-存储部;am-车辆(移动体)。
具体实施方式
33.下面,参照附图对示例性实施方式进行详细的说明。
34.图1示出实施方式所涉及的移动体的控制系统的构成例的概念图。在移动体上安装有多个硬件1,本控制系统对各硬件1进行控制。在作为移动体之一例即汽车的情况下,硬件1例如为发动机、变速器、制动器等。
35.在图1的控制系统中,设置有进行数字信号的传输的信号总线2。信号总线2的协议例如为can(controller area network)、以太网(注册商标)等。控制器10包括:运算装置11,其运算移动体的动作;信号总线控制ic12,在它与信号总线2之间进行数字信号的输入和输出;以及电源总线控制ic13,其对电源总线5进行控制。运算装置11例如具有多个运算内核11a,构成为能够执行超高速运算。
36.在各硬件1中设置有控制该硬件1的执行器(actuator)21和检测该硬件1的状态的传感器22。执行器21例如为设置于发动机的燃料喷射器或火花塞、设置于各车轮的制动装置、辅助转向操作的动力转向装置、设置于各车门的电动车窗装置等。传感器22例如为检测曲轴的旋转位置的曲轴位置传感器、检测节气门的打开程度的节气门位置传感器等。
37.执行器21及传感器22上都附加有通用ic23。通用ic23与信号总线2相连接。也就是说,数字信号在控制器10与各通用ic23之间的通信路径上传递,不经由中继ecu(electronic control unit)。
38.控制器10利用运算装置11进行决定移动体的动作的运算,根据运算结果生成规定各执行器21的动作的数字信号。该数字信号例如表示规定执行器21的动作的物理量数据。具体而言,例如为表示执行器21应做功的能量、成为执行器21应调节的目标的温度和压力、或者发动机的转速、阀的开度等。该数字信号例如确定提供给具有执行器的车载装置的电信号。具体而言,例如为电信号的信号波形、表示电信号的发生时刻的时间、电信号的频率和电压等。
39.附加给执行器21的通用ic23从信号总线2获取规定该硬件1的动作的数字信号。该通用ic23根据已获取的数字信号所规定的动作,生成对该执行器21的控制信号。通用ic23在获取新的数字信号之前的那段时间里,持续地将已生成的控制信号提供给该执行器21。
40.附加于传感器22的通用ic23根据从该传感器22获取的数据信号,生成表示该硬件1的状态的数字信号并输出给信号总线2。该数字信号例如表示物理量数据,该物理量数据表示硬件1的状态。该物理量数据具体为温度、压力、转速等。
41.控制器10从信号总线2获取表示各硬件1的状态的数字信号。运算装置11根据已获取的数字信号所表示的各硬件1的状态,进行决定移动体的下一个动作的运算。控制器10根据该运算结果,生成规定各执行器21的动作的数字信号。控制器10生成数字信号的周期比通用ic23向执行器21提供控制信号的周期长得多。
42.图2示出将本实施方式所涉及的控制系统应用于车辆的情况下的构成例。在图2中,在车辆am上设置有多个执行器21。各执行器21分别与通用ic23相连接。各通用ic23经由通信线cl与控制器10相连接。通信线cl为实现图1中的信号总线2的部件之一例,例如具有1gbps以上的通信速度。
43.图2所示的车辆am为除了通过驾驶员的操作而行驶的手动驾驶之外,还能够进行辅助驾驶员的操作而行驶的辅助驾驶、以及无驾驶员操作而行驶的自动驾驶的汽车。该车
辆am在驱动控制、制动控制以及转向控制中采用电气地进行控制的线控方式。也就是说,车辆am利用传感器检测油门踏板的操作、制动踏板的操作以及方向盘的操作。承担各控制工作的执行器21用控制信号进行控制,所述控制信号由控制器10根据传感器的输出生成。
44.需要说明的是,在图2中,控制器10布置在车辆am的后部,但控制器10的布置状况并不限定于此。
45.图3更详细地示出安装于车辆am的驱动系统和制动系统与控制器10之间的关系。
46.车辆am的驱动系统具有:作为驱动源的发动机30,其具有多个(在本实施方式中为四个)气缸31;以及变速器40,其与发动机30相连结。车辆am的制动系统具有对驱动轮w的旋转进行制动的制动器50。
47.发动机30例如为汽油发动机。对发动机30的各气缸31分别设置有:燃料喷射器,其向气缸31内供给燃料;火花塞,其用于使燃料与供给到气缸内的进气的混合气点火。发动机30对每个气缸31都设置有进气门、排气门、调节进气门及排气门的开、闭的气门传动组。于发动机30设置有在气缸31内往复运动的活塞、及经由连杆与该活塞相连结的曲轴。
48.发动机30曲轴的旋转经由带轮传递给其他执行器。例如,如图3所示,在发动机30的气缸排列方向的一端设置有与所述曲轴相连接的发动机侧带轮32。该发动机侧带轮32经由第一传动带33与第一输出带轮34相连结,该发动机侧带轮32经由该第一传动带33驱动该第一输出带轮34。发动机侧带轮32经由第二传动带35与第二输出带轮36相连结,该发动机侧带轮32经由该第二传动带35驱动该第二输出带轮36。第一输出带轮34的旋转传递到作为发电机的交流发电机37。交流发电机37由曲轴带动着旋转而发电。第二输出带轮35的旋转传递给空调装置中的压缩机38。压缩机38利用曲轴的旋转压缩用于空调的制冷剂。交流发电机37和压缩机38与燃料喷射器等同样为构成发动机30的要素,是能够使与发动机30的输出相关的参数即发动机参数变动的执行器。
49.变速器40例如为有级式自动变速器。变速器40布置于发动机30的气缸排列方向的另一端。变速器40包括:输入轴(省略图示),其与发动机30的曲轴连结;与输出轴(省略图示),其经由多个减速齿轮(省略图示)与该输入轴相连结。所述输出轴与驱动轮w的车轴相连结。曲轴的旋转通过变速器40变速并传递给驱动轮w。
50.制动装置50具有:制动执行器53;与制动执行器53相连接的助力器54;与助力器54相连接的主缸55;实际对驱动轮w的旋转进行制动的制动衬块57。于驱动轮w的车轴设有圆盘转子58。制动装置50是电动制动器,根据由制动传感器22c检测出的制动踏板63的操作量使制动执行器53工作,经由助力器54及主缸55使制动衬块57工作。制动装置50通过制动衬块57夹持圆盘转子58,利用制动衬块57与圆盘转子58之间产生的摩擦力对驱动轮w的旋转进行制动。
51.由控制器10控制发动机30、变速器40和制动装置50工作。例如,在车辆am采用手动驾驶时,控制器10基于检测与驾驶员的油门踏板的操作量相对应的油门开度的油门开度传感器22a的检测值、外部空气的气压、附件(前照灯等)的要求电力、空调的要求输出等,计算发动机30的标准发动机参数,控制燃料喷射器的燃料喷射量和燃料喷射时刻、火花塞的点火时刻、气门传动组打开、关闭的进排气门的开、闭时刻及开、闭期间、交流发电机37的负荷、压缩机38的负荷等。当车辆am采用手动驾驶时,控制器10还根据检测驾驶员对变速杆62的操作的档位传感器22b的检测结果和从油门开度计算出的要求驱动力来调节变速器40的
档位。当车辆1采用手动驾驶时,控制器10基于检测驾驶员对制动踏板63的操作量的制动传感器22c等的检测值,计算后述的标准制动参数,控制对制动执行器53的操作量。另一方面,当车辆am采用自动驾驶时,控制器10基本上计算对发动机30的构成要素(燃料喷射器或压缩机38等)的控制量并向执行器输出控制信号,以实现由运算装置11基于车外环境计算出的标准发动机参数。在车辆am采用自动驾驶时,控制器10基本上计算对制动执行器53的控制量,并向该制动执行器53输出控制信号,以便达成由运算装置11基于车外环境计算出的标准制动参数。
52.如图4所示,运算装置11具有用于实际控制硬件1的各执行器21的控制部100。控制部100根据来自传感器22的输入信息,计算出各硬件1的目标输出即目标参数,控制各执行器21以便输出该目标参数。
53.这里,有时在控制部100控制各执行器而发挥出的各硬件1的实际参数和目标参数之间会产生差异。该差异是由于执行器21本身的劣化或连接执行器21彼此的要素(带轮或传动带)的劣化等原因而产生的。以往通过反馈控制对实际参数与目标参数之间的差异进行补偿,但当实际原因不明时,则无法进行适当的补偿。如果为了确定原因而变更对实际硬件1的控制,则有可能对车辆的行驶带来不良影响。
54.于是,在本实施方式中,让运算装置11存储多种模型,并用用该模型进行模拟,由此确定出实际参数与目标参数之间的差异的原因,同时使实际参数符合目标参数。
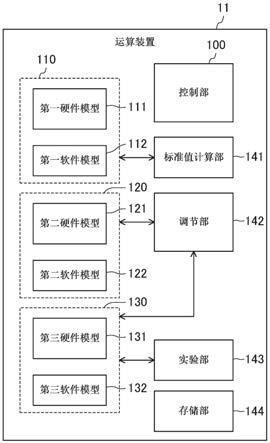
55.具体而言,运算装置11包括第一相同认定模型110,该第一相同认定模型110具有:第一硬件模型111,该第一硬件模型111是将硬件1的动态特性模型化后得到的;以及第一软件模型112,其被输入与来自传感器22且输入控制部100的输入信息相同的输入信息,并且能够对第一硬件模型111执行与控制部100对各硬件1进行的处理相同的处理。运算装置11包括第二相同认定模型120,该第二相同认定模型120具有:第二硬件模型121,该第二硬件模型121是将硬件1的动态特性模型化后得到的;以及第二软件模型122,其被输入与来自传感器22且被输入控制部100的输入信息相同的输入信息,并且能够对第二硬件模型121执行与控制部100对各硬件1进行的处理相同的处理。运算装置11包括实验模型130,该实验模型130具有:第三硬件模型131,该第三硬件模型131是将硬件1的动态特性模型化后得到的;以及第三软件模型132,其能够对第三硬件模型131执行与控制部100对硬件1进行的处理相同的处理。
56.运算装置11包括标准值计算部141,该标准值计算部141使用第一相同认定模型110计算成为相对于来自传感器22的输入信息的硬件1的标准的标准输出值。运算装置11包括调节部142,该调节部142更新第二硬件模型121中硬件1的模型的动态特性,以便使通过第二软件模型122的处理得到的第二硬件模型121的输出值符合硬件1的实际输出值。运算装置11包括实验部143,其根据与来自传感器22的输入信息相同的信息或该输入信息被变更后而得到的改变信息所表示的条件,使用第三软件模型132对第三硬件模型131进行运算处理。运算装置11还包括存储部144,该存储部144中存储有与控制部100用于控制各硬件1的控制内容相关的控制条件。
57.第一相同认定模型110的第一硬件模型111是将处于构成要素无不良现象的状态的硬件1模型化后而得到的模型。构成要素不仅包括执行器21,还包括设置在发动机上的带轮(上述发动机侧带轮32、第一输出带轮34、第二输出带轮36等)及卷绕在该带轮上的传动
带(上述第一传动带33、第二传动带35等)。“构成要素无不良现象的状态”,是指例如构成要素没有发生随时间劣化的状态(新品的状态)。
58.标准值计算部141通过使用第一软件模型112对第一硬件模型111进行与控制部100对硬件1进行的处理相同的运算处理,来计算相对于来自传感器22的输入信息的硬件1的标准输出值。换句话说,标准值计算部141根据实际的传感器22的值,使用第一相同认定模型110进行模拟。如上所述,由于第一硬件模型111将处于构成要素无不良现象状态的硬件1模型化了,因此第一硬件模型111的输出值为相对于来自传感器22的输入信息的硬件1的理想值。也就是说,标准值计算部141计算出的标准输出值相当于控制部100根据来自各传感器22的输入信息设定的各硬件1的目标参数。
59.由标准值计算部141对各硬件1分别执行模拟,对各硬件1分别计算出标准输出值。例如,标准值计算部141使用第一硬件模型111中与发动机30相关的模型,针对油门开度、外部空气的气压等输入信息,计算成为发动机30的标准的输出值即标准发动机参数。标准发动机参数包括发动机扭矩、怠速转速等。例如,标准值计算部141使用第一硬件模型111中与制动器50相关的模型,针对制动踏板的踩踏量等输入信息,计算成为制动器50的标准的输出值即标准制动参数。标准制动参数包括到停车为止的时间和制动力的变化等。
60.调节部142根据标准输出值和硬件1的实际输出值,更新第二硬件模型122的动态特性,以便使通过第二软件模型121的处理得到的第二硬件模型121的输出值符合硬件1的实际输出值。调节部142在更新第二硬件模型121时,对第三硬件模型131也进行同样的更新。需要说明的是,“第二硬件模型121的输出值符合硬件1的实际输出值”是指第二硬件模型121的输出值无限接近硬件1的实际输出值,其包括第二硬件模型121的输出值与硬件1的实际输出值一致的情况。
61.调节部142在标准输出值与实际输出值之间产生差异的情况下,使用第二相同认定模型120来验证该差异的原因。参照图5及图6的流程图对此进行说明。
62.图5为在车辆怠速运转时,作为发动机参数之一的怠速转速的标准怠速转速与实际怠速转速之间产生差异时的流程图。作为实际怠速转速与标准怠速转速之间产生差异的原因,能够想到的有:(i)因气体泄漏而导致空调装置的压缩机38的负荷增大、(ii)与压缩机38相连结的第二输出带轮36的滑动、(iii)交流发电机37的劣化、(iv)与交流发电机37相连结的第一输出带轮34的滑动、(v)活塞环的劣化等各种原因。调节部142使用第二相同认定模型120来验证哪一个原因可能性最高。
63.首先,在步骤s101中,调节部142获取由标准值计算部141计算出的标准怠速转速ra和控制部100控制发动机而发挥出来的实际怠速转速rr。实际怠速转速rr例如由曲轴转角传感器检测。
64.接着,在步骤s102中,调节部142判断标准怠速转速ra和实际怠速转速rr的指标值h
e
是否在事先设定好的阈值以上。在该情况下,指标值h
e
为表示标准怠速转速ra与实际怠速转速rr的偏离程度的值。例如,如下式所示,指标值h
e
是以规定时间对标准怠速转速ra与实际怠速转速rr之差的平方值进行时间积分后得到的值。
65.(公式1)
66.h
e1
=∫(ra
‑
rr)2dt
67.它意味着:该指标值h
e
越小,标准怠速转速ra与实际怠速转速rr的差异越小。在指
标值he1在阈值以上的“是”时,进入步骤s103。另一方面,在指标值h
e1
小于阈值的“否”时,调节部142不对第二硬件模型121、第三硬件模型131进行更新即结束运算处理。
68.在所述步骤s103中,调节部142一边变更第二硬件模型121中各构成要素的状态参数(第二输出带轮的模型的摩擦系数等),一边利用第二软件模型122将第二硬件模型121发挥出来的怠速转速(以下称为验证怠速转速rs)分别计算出来。变更的状态参数例如通过表等事先设定。
69.接着,在步骤s104中,调节部142将在所述步骤s103中计算出的各验证怠速转速rs和实际怠速转速rr的指标值h
e2
分别计算出来。例如,像上述指标值h
e1
那样,指标值h
e2
是以规定时间对实际怠速转速rr与验证怠速转速rs之差的平方值进行时间积分后得到的值。
70.接着,在步骤s105中,调节部142提取指标值h
e2
达到最小时的条件(构成要素的状态参数)。指标值h
e2
最小时的条件是验证怠速转速rs符合实际怠速转速rr的条件,因为能将该条件视为最忠实地再现了实际的发动机30的状态的条件之故。例如,如果已将第二输出带轮36的摩擦力减小时同为指标值h
e2
最小时,调节部142就提取已将第二输出带轮36的摩擦力减小的条件。
71.接着,在步骤s106中,调节部142基于在所述步骤s105中提取的条件,更新第二硬件模型121、第三硬件模型131中发动机30的模型。例如,如上所述,调节部142在提取了减小第二输出带轮36的摩擦力的条件以后,就对第二硬件模型121中第二输出带轮的模型进行更新。在步骤s106之后,调节部142结束运算处理。
72.另一方面,图6为在车辆行驶时,作为制动参数之一的制动力的标准制动力与实际制动力之间产生差异时的流程图。作为实际制动力和标准制动力之间产生差异的原因,能够想到的有:(i)制动执行器53的不良现象、(ii)助力器54的不良现象、(iii)制动衬块57的摩擦变动等各种原因。与发动机30的情况一样,调节部142使用第二相同认定模型120来验证哪一个原因可能性最高。
73.首先,在步骤s201中,调节部142获取由标准值计算部141计算出的标准制动力fa和控制部100控制制动器50而发挥出来的实际制动力fr。实际制动力fr例如由加速度传感器检测。
74.接着,在步骤s202中,调节部142判断标准制动力fa和实际制动力fr的指标值h
b1
是否在事先设定好的阈值以上。与上述发动机30的情况一样,指标值h
b1
例如能使用以规定时间对标准制动力fa与实际制动力fr之差的平方值进行时间积分后得到的值。当为指标值h
b1
在阈值以上的“是”」时,进入步骤s203。另一方面,当为指标值h
b1
小于阈值的“否”时,调节部142不对第二硬件模型121、第三硬件模型131进行更新即结束运算处理。
75.在所述步骤s203中,调节部142一边变更第二硬件模型121中各构成要素的状态参数(制动衬块57的摩擦力等),一边使用第二软件模型122将第二硬件模型121发挥出来的制动力(以下称为验证制动力fs)分别计算出来。变更的状态参数例如通过表等事先设定。
76.接着,在步骤s204中,调节部142将在所述步骤s203中计算出的各验证制动力fs和实际制动力fr的指标值h
b2
分别计算出来。例如,如上述指标值h
b1
那样,指标值h
b2
是以规定时间对实际制动力fr与验证制动力fs之差的平方值进行时间积分后得到的值。
77.接着,在步骤s205中,由调节部142提取指标值h
b2
达到最小时的条件(构成要素的状态参数)。指标值h
b2
最小时的条件是验证制动力fs符合实际制动力fr的条件,因为能将该
条件视为最忠实地再现了实际的制动器50的状态的条件之故。
78.接着,在步骤s206中,调节部142基于在所述步骤s205中提取的条件对第二硬件模型121、第三硬件模型131中制动器50的模型进行更新。在步骤s206之后,调节部142结束运算处理。
79.如上所述,调节部142更新第二硬件模型121中硬件模型的动态特性,以便使通过第二软件模型122的处理得到的第二硬件模型121的输出值符合硬件1的实际输出值。
80.像这样,通过由调节部142进行验证,当在硬件1中发生了不良现象时,就能够将不良部位确认下来。由于不使用实际的硬件1即能够由该调节部142执行模拟,因此不会对车辆的行驶带来不良影响。调节部142的验证结果也输出给控制部100。控制部100在能够根据调节部142的信息认定硬件1的构成要素发生了不良现象时(第二输出带轮36的摩擦系数变得极低等),将该情况通知给车辆的驾驶员,催促驾驶员更换对象构成要素。作为通知方法,能够想到的有:在汽车导航系统的显示屏上进行显示、或者向驾驶员的移动终端发送信息等。
81.在由调节部142完成了对第三硬件模型131的更新以后,实验部143就使用该第三硬件模型131和第三软件模型132进行模拟。实验部143进行的模拟有两个,一个是第一符合模拟,该第一符合模拟基于与来自传感器22且输入控制部100的输入信息相同的输入信息,利用第三软件模型132控制第三硬件模型131,计算使利用该第三硬件模型131得到的实验输出值符合由标准值计算部141计算出的标准输出值的控制条件。通过进行该第一符合模拟,能够计算出在当前的硬件1的状态下能够使实际输出值接近标准输出值的控制条件。也就是说,由调节部142更新后而得到的第三硬件模型131成为忠实地再现了实际的硬件1的状态的模型。因此,如果控制部100以该第三硬件模型131的输出值符合标准输出值那样的控制内容来控制硬件1,就能够使实际输出值符合标准输出值。需要说明的是,就发动机30而言,所谓的控制条件例如是交流发电机37的负荷、压缩机38的负荷、燃料喷射器的燃料喷射的时刻等;就制动器50而言,所谓的控制条件是制动执行器53的工作量等。
82.第一符合模拟仅在调节部142刚刚对第三硬件模型131进行完更新后执行。每次更新第三硬件模型131时,都执行第一符合模拟。
83.图7示出了第一符合模拟之一例。在图7中,正在计算用于使怠速转速符合标准怠速转速的控制条件。
84.首先,在步骤s301中,由实验部143判断是否为刚刚对第三硬件模型131进行完更新之后。在为刚刚对第三硬件模型131进行完更新之后的“是”时,进入步骤s302;在不是刚刚对第三硬件模型131进行完更新之后的“否”时,由实验部143结束第一符合模拟。
85.接着,在步骤s302中,实验部143一边利用第三软件模型132改变对第三硬件模型131的控制内容,一边按每个控制内容分别计算出第一实验怠速转速re1。变更的控制内容例如通过表等事先设定。
86.接着,在步骤303中,实验部143将各第一实验怠速转速re1与标准怠速转速ra的指标值h
e3
分别计算出来。如上所述,指标值h
e3
例如能够使用以规定时间对第一实验怠速转速re1与标准怠速转速ra之差的平方值进行时间积分后得到的值。
87.接着,在步骤s304中,由实验部143提取指标值h
e3
达到最小时的控制条件。指标值
e3
最小时的控制条件为第一实验怠速转速re1符合标准怠速转速ra的条件。在步骤s304之
后,结束第一符合模拟。
88.实验部143将通过第一符合模拟提取的控制条件输出给控制部100。例如,在提取了减小压缩机38的负荷的条件时,控制部100就会使压缩机38的负荷比之前的控制条件下的负荷小。这样一来,能够使发动机30的实际怠速转速rr符合标准怠速转速ra。
89.实验部143执行的另一个模拟是第二符合模拟,该第二符合模拟基于改变来自传感器22且输入控制部100的输入信息而得到的改变信息,计算用于控制第三硬件模型131的特定控制条件,以便使第三软件模型132对第三硬件模型131进行运算处理时得到的输出符合标准值计算部141计算出的标准输出值。实验部143根据来自传感器22的输入信息,生成所述改变信息执行第二符合模拟。改变信息是使来自传感器22等的输入信息更加不良的信息。具体而言,改变信息例如为:将车外气温变更为比实际气温高的值、或将上坡的坡度变更为比实际坡度大的值、或将表示车行道的粗糙度的参数变更为比实际粗糙度大的值、或将大气压变更为比实际大气压低的值的信息。
90.通过基于改变信息执行第二符合模拟,即使在车外环境急剧变化为改变信息所表示的环境时或成为以往无法设想的环境时,也能够通过控制部100适当地控制硬件1。特别是,在车辆正在进行自动驾驶时,由于处于无法根据驾驶员的经验进行油门的踩踏量的变更等调节的状态,因此需要以第二符合模拟备用。
91.图8示出了第二符合模拟之一例。在图8中,正在计算使基于改变信息计算出的第二实验怠速转速符合标准怠速转速的控制条件。
92.首先,在步骤s401中,由实验部143判断是否为能够执行第二符合模拟的期间。具体而言,实验部143判断是否为尚未执行第一符合模拟的期间。在为能够执行第二符合模拟的期间的“是”时,进入步骤s402;在不是能够执行第二符合模拟的期间的“否”时,由实验部143结束第二符合模拟。
93.接着,在步骤s402中,根据从传感器22输入的输入信息生成改变信息。
94.接着,在步骤s403中,实验部143一边利用第三软件模型132变更第三硬件模型131的控制内容,一边按每个控制内容将基于已生成的改变信息来控制第三硬件模型131时的第二实验怠速转速re2分别计算出来。变更的控制内容例如通过表等事先设定。
95.接着,在步骤s404中,实验部143将各第二实验怠速转速re2与标准怠速转速ra的指标值h
e4
分别计算出来。如上所述,指标值h
e4
例如能够使用以规定时间对第二实验怠速转速re2与标准怠速转速ra之差的平方值进行时间积分后得到的值。
96.接着,在步骤s405中,实验部143提取指标值h
e4
达到最小时的控制条件作为特定控制条件。指标值h
e4
最小时的控制条件为第二实验怠速转速re2符合标准怠速转速ra的条件。在步骤s405之后,结束第二符合模拟。
97.实验部143在计算出特定控制条件后,将该特定控制条件存储在存储部144中。控制部100在来自传感器22的输入信息所示的条件与所述改变信息所表示的条件相类似时,从存储部144读出与该改变信息所表示的条件相对应的特定控制条件,根据该特定控制条件控制硬件1。这样做,就能够对特殊的环境事先做好准备。特别是,即使在车辆以自动驾驶而行驶时,通过事先准备好适当的特定控制条件,控制部100不经由驾驶员的操作,就能够为以适当的控制条件控制硬件1。
98.在第二符合模拟中,能够计算出硬件1无法工作的条件。也就是说,假定在生成改
变与车外环境相关的信息而得到的改变信息并计算第三硬件模型131的输出时,得不到输出值。此时,该改变信息所表示的车外环境为硬件1不再起作用的环境。实验部143在获得了这样的硬件1不再起作用的改变信息后,也会让存储部144将该改变信息存储起来。控制部100在来自传感器22等的输入信息与硬件1不再起作用的改变信息相类似时,向驾驶员发出通知,提醒驾驶员注意。
99.由于第一符合模拟和第二符合模拟都是不使用实际的硬件1即能够执行,因此不会对车辆的行驶带来不良影响。
100.因此,在本实施方式中,控制器10包括:控制部100,其实际控制硬件1;第一相同认定模型110,其具有:第一硬件模型111,该第一硬件模型111是将硬件1的动态特性模型化后得到的,以及第一软件模型112,其被输入与来自传感器22且输入控制部100的输入信息相同的输入信息,并且能够对第一硬件模型型111执行与控制部100对各硬件1进行的处理相同的处理;第二相同认定模型120,其具有:第二硬件模型121,该第二硬件模型121是将硬件1的动态特性模型化后得到的,以及第二软件模型122,其被输入与来自传感器22且输入控制部100的输入信息相同的输入信息,并且能够对第二硬件模型121执行与控制部100对各硬件1进行的处理相同的处理;标准值计算部141,其使用第一相同认定模型110计算成为相对于输入信息的硬件1的标准的标准输出值;调节部142,其根据标准输出值及硬件的实际输出值,更新第二硬件模型121中硬件1模型的动态特性,以便使通过第二软件模型122的处理得到的第二硬件模型121的输出值符合硬件1的实际输出值。第二相同认定模型120的第二硬件模型121由调节部142进行更新,以便使该标准输出值符合硬件1的实际输出值。也就是说,第二硬件模型121为再现了实际的硬件1的不良部位的模型。因此,能够根据该更新信息确定实际产生不良现象的部位。其结果是,控制部100能够进行与不良部位相对应的补偿,能够使对作为移动体的车辆的控制状态尽可能地接近所希望的控制状态。
101.在本实施方式中,控制器10还包括:实验模型130,其具有第三硬件模型131,该第三硬件模型131是将硬件1的动态特性模型化后得到的,以及第三软件模型132,其能够对第三硬件模型131执行与控制部100对硬件1进行的处理相同的处理;实验部143,其根据从传感器22输入控制部100的输入信息所表示的条件或者该输入信息被变更后而得到的改变信息所表示的条件,利用第三软件模型132对第三硬件模型131进行处理。调节部142构成为在更新第二硬件模型121时,对第三硬件模型131也进行同样的更新。实验部143计算出控制第三硬件模型131的特定控制条件,以便使第三软件模型132对第三硬件模型131进行处理时得到的输出符合由标准值计算部141计算出的标准输出值。也就是说,因为对实验模型130的第三硬件模型131进行了与第二硬件模型121一样的更新,因此第三硬件模型131反映了实际的硬件1的动态特性。而且,通过由实验部143使用实验模型130进行模拟,就能够计算出对应各种环境的控制条件。例如,如果基于从传感器22输入控制部100的信息进行模拟,就能够计算出硬件1的适合当前的车外环境的控制条件。通过对在使外部气温相对于实际的外部气温极高或极低时硬件1的输出值会变成什么样子这一情况进行模拟,在车辆暴露于这样的环境下的时候,就能够将硬件1的控制条件设定为适当的内容(特定控制条件的内容)。其结果是,能够更适当地控制作为移动体的车辆工作。
102.在本实施方式中,控制器10还包括存储通过实验部143计算出的特定控制条件的存储部144。当来自传感器22的输入信息所表示的条件与改变信息所示的条件相类似时,控
制部100便从存储部144读出与改变信息所表示的条件相对应的特定控制条件,用该特定控制条件控制硬件1。像这样,由实验部143事先计算出针对各种环境的硬件1的特定控制条件,并将该特定控制条件累积起来。在实际的车外环境与实验部130在模拟中设想的环境相类似时,只需要读出累积在那里的特定控制条件,就能够适当控制作为移动体的车辆工作。
103.此处所公开的技术不限于上述实施方式,在不脱离权利要求书的主旨的范围内能够进行替换。
104.例如,在上述实施方式中,对更新第二硬件模型121、第三硬件模型131中的表示发动机30及制动器50的模型的情况进行了说明。但并不限于此,也可以将第二硬件模型121、第三硬件模型131中的变速器40的模型、动力转向器的模型作为对象。
105.在上述实施方式中,将汽车车辆作为移动体进行了示例。但并不限于此,也可以以工厂等的自动输送装置作为对象。
106.上述实施方式仅为示例而已,不得对本公开的范围做限定性解释。本公开的保护范围由权利要求书定义,属于权利要求的等同范围的变形、变更都包括在本公开的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。