一种智能agv运输小车
技术领域
1.本实用新型涉及agv技术领域,具体为一种智能agv运输小车。
背景技术:
2.agv智能小车,即轮式机器人,是移动机器人的一种,其内容涵盖机械、汽车、电子、自动控制、计算机、传感技术等多个学科的知识领域,作为一门新兴的综合技术,可广泛的应用于工厂自动料车、固定场地搬运车等技术领域,也可应用于复杂、恶劣的工作环境,随着物流系统的迅速发展,agv也逐渐应用于运输小车领域。
3.但现有的用于物流运输的智能运输小车只能将货物运送到楼下,无法实现上楼送货的功能,有时也会出现换向问题,就需要人工助力才能进行,为全智能运输的实现制造了障碍,使得全智能运输无法进一步推广和发展。
技术实现要素:
4.本实用新型针对上述现有技术存在的问题,提供一种智能agv运输小车。
5.为实现以上目的,本实用新型通过以下技术方案予以实现:
6.一种智能agv运输小车,包括车体,所述车体的前端两侧均设有前端爬坡轮组,后端两侧均设有后端爬坡轮组,后端驱动机构驱动后端爬坡轮组带动车体向前移动,或者推杆机构推动前端爬坡轮组搭设在下一坡度,同时后端驱动机构驱动后端爬坡轮组带动车体上下坡。
7.进一步地,所述前端爬坡轮组包括三角轴承架和设置在三角轴承架上的第一滚轮。
8.进一步地,所述推杆机构包括推杆,所述推杆的一端和车体转动连接,另一端和三角轴承架转动连接,所述推杆和第一驱动机构连接,所述第一驱动机构驱动推杆抬起和放下,使第一滚轮搭设在下一坡度上。
9.进一步地,所述后端爬坡轮组包括三角联动机构,所述三角联动机构上设有第二滚轮,所述第二滚轮在三角联动机构的带动下转动。
10.进一步地,所述后端驱动机构包括驱动轴,所述驱动轴的一端和三角联动机构连接,另一端和第二驱动机构连接,所述第二驱动机构驱动三角联动机构转动,进而驱动第二滚轮转动。
11.进一步地,所述车体的前端还设有换向轮,所述换向轮包括第一换向轮和第二换向轮,所述第一换向轮和第二换向轮分别设置在车体的前端两侧,并通过同轴连杆连接,所述第二换向轮连接有第三驱动机构,并在第三驱动机构的驱动下换向。
12.进一步地,所述车体前方设有摄像头和激光雷达,发所摄像头和激光雷达均与主控单元连接,对道路进行轨迹特征的提取,并将提取到的轨迹特征发送给主控单元。
13.进一步地,主控单元还连接有gps定位系统,gps定位系统能够将运输小车的位置准确测定,并将测定结果反馈给主控单元,主控单元将位置信息上传到云端服务器。
14.进一步地,还包括陀螺仪,所述陀螺仪用于检测运输小车所处的位置状态,并将该状态发送给主控单元。
15.本实用新型的有益效果:
16.本实用新型提供的智能agv小车具有前端爬轮组和后端爬轮组,二者在主控单元的控制下,实现了上下坡的功能,并且可以上下楼梯,解决了现有的运输小车无法上下楼梯的问题。此外,主控单元还连接有摄像头、激光雷达、陀螺仪等检测器件,能够很好地检测运输小车的行进路线、周围环境以及车体状态,保证运输小车平稳正确地行进。
附图说明
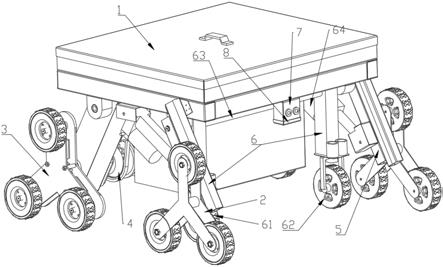
17.图1为本实用新型智能agv运输小车其中一视角下的结构示意图;
18.图2为本实用新型智能agv运输小车另一视角下的结构示意图。
19.图中:1
‑
车体,2
‑
前端爬轮组,21
‑
三角轴承架,22
‑
第一滚轮,3
‑
后端爬坡轮组,31
‑
三角联动机构,32
‑
第二滚轮,4
‑
后端驱动机构,41
‑
驱动轴,42
‑
第二驱动机构,5
‑
推杆机构,51
‑
推杆,52
‑
第一驱动机构,6
‑
换向轮,61
‑
第一换向轮,62
‑
第二换向轮,63
‑
同轴连杆,64
‑
第三驱动机构,7
‑
摄像头,8
‑
激光雷达。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
21.在本技术的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
22.除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
23.请参考图1,一种智能agv运输小车,包括车体1,车体1的前端两侧均设有前端爬坡轮组2,车体1的后端两侧均设有后端爬坡轮组3,后端驱动机构4驱动后端爬坡轮组3带动车体1向前移动,或者推杆机构5推动前端爬坡轮组2搭设在下一坡度,同时后端驱动机构4驱动后端爬坡轮组3带动车体1上下坡。
24.具体而言,请参考图2,前端爬坡轮组2包括三角轴承架21和设置在三角轴承架21上的第一滚轮22。
25.推杆机构5包括推杆51,推杆51的一端和车体1转动连接,另一端和三角轴承架21转动连接。
26.推杆51还连接有第一驱动机构52,第一驱动机构52驱动推杆51抬起和放下,使第一滚轮22搭设在下一坡度上,以便实现上下坡。第一驱动机构52为气缸等任何可以实现伸缩功能的驱动器件。
27.后端爬坡轮组3包括三角联动机构31,三角联动机构31上设有第二滚轮32,第二滚轮32在三角联动机构31的带动下转动。
28.后端驱动机构4包括驱动轴41,驱动轴41的一端和三角联动机构31连接,另一端和第二驱动机构42连接,第二驱动机构42驱动三角联动机构31转动,进而驱动第二滚轮32转动。第二驱动机构42为伺服电机。
29.例如,在需要上楼或下楼时,推杆机构5推动前端爬坡轮组2搭设在上一级楼梯或者下一级楼梯上,后端驱动机构4驱动后端爬坡轮组3转动,进而带动前端爬坡轮组2转动,实现上楼或下楼。
30.显而易见,后端爬坡轮组3是一组主动轮,第二驱动机构42即为其驱动力的来源,而前端爬坡轮组2是一组从动轮,跟随后端爬坡轮组3转动。
31.进一步的,车体1的前端还设有换向轮6,换向轮6包括第一换向轮61和第二换向轮62,第一换向轮61和第二换向轮62分别设置在车体1的前端两侧,并通过同轴连杆63连接,第二换向轮62连接有第三驱动机构64,并在第三驱动机构64的作用下进行换向。
32.具体而言,请参考图1和图2,第三驱动机构64为驱动电机,第二换向轮62和驱动电机连接,驱动电机驱动其转动,同时第二换向轮62通过同轴连杆63带动第一换向轮61转动,实现换向功能。
33.进一步的,车体1前方设有摄像头7和激光雷达8,摄像头7和激光雷达8均与主控单元连接,对道路进行轨迹特征的提取,并将提取到的轨迹特征发送给主控单元,主控单元对轨迹特征进行分析后,控制车体1沿着正确轨迹行进,并通过通信单元发送给云端服务器。
34.具体而言,摄像头7为双目摄像头,摄像头7用于拍摄道路图像,激光雷达用于探测道路周围环境,二者将拍摄到的图像和探测到的声波信息发送给主控单元,主控单元对其进行分析,获取周围环境情况,判定是否沿着正确的轨迹行走,同时在行进到需要上坡、下坡、转向的位置处时,及时驱动相应的驱动机构做出动作。
35.主控单元为现有的控制器,例如,stm32系列的单片机等。主控单元和通讯单元连接,通讯单元一般为wifi模块等,将上述分析结果上传云端服务器。
36.进一步的,主控单元还连接有gps定位系统,gps定位系统能够将运输小车的位置准确测定,并将测定结果反馈给主控单元,主控单元将位置信息上传到云端服务器。
37.车体1中还安装有陀螺仪,陀螺仪用于检测运输小车所处的位置状态,并将该位置状态发送给主控单元,主控单元驱动第一驱动机构4、第二驱动机构52向前行进或者上下坡。
38.具体而言,检测位置状态是指陀螺仪能够检测车体1是处于上坡、下坡或者平坡位置,其将检测结果发送给主控单元,主控单元则驱动第一驱动机构4、第二驱动机构52行进、上坡或者下坡。
39.工作原理:
40.智能agv运输小车配备了摄像头7、激光雷达8、陀螺仪,摄像头7、激光雷达8、陀螺仪会对前方道路和车体1的位置状态进行特征提取,并将提取的特征发送给主控单元,主控单元根据上述特征驱动第一驱动机构4、第二驱动机构42以及第三驱动机构64工作,实现平坡、上下坡行走以及换向。
41.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能
认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。