1.本实用新型应用于产品检测技术领域,特别涉及一种自动化光学检测机台。
背景技术:
2.近年来,科技发展迅速,各种高科技设备、高科技仪器都渗透到普通老百姓生活的方方面面,人们对这些设备和仪器的要求也越来越高,特别是在产品的体积和精度方面,体积越小、精度越高就越受欢迎。产品体积的变小,对于产品内部核心部件的要求就更高,对各核心部件的配合公差就越来越高。现有的技术中,是通过设备测量产品的外形尺寸、角度位置等,通过抽检或者实验测量数据,保证产品的尺寸公差。这些设备一般需要人工装夹、对位、取点、测量、拆卸等流程,各设备功能比较单一,效率低,适合小批量产品的生产制造,对于大批量和全检高精度要求产品来说,这些设备是远远不能满足生产需求的。
3.现在技术中,测量产品高度时,是通过把产品固定到平台上,手动或自动升降探头,通过计算两次测量值差,得出产品高度值;测量角度时,则是通过高清晰度镜头和高分辨率ccd,实现产品高清晰度测量。但是,现有高度测量仪、角度测量仪都是手动操作为主,只能满足实验或取样的测试需求,如果要实现批量装夹、批量测试、角度和高度同时测量,现有的装置很难同时保证这三点。如能设计出一种结构简单,检测精度高,工作效率高的自动化光学检测机台,则能够很好地解决上述问题。
技术实现要素:
4.本实用新型所要解决的技术问题是克服现有技术的不足,提供了一种结构简单,检测精度高,工作效率高的自动化光学检测机台。
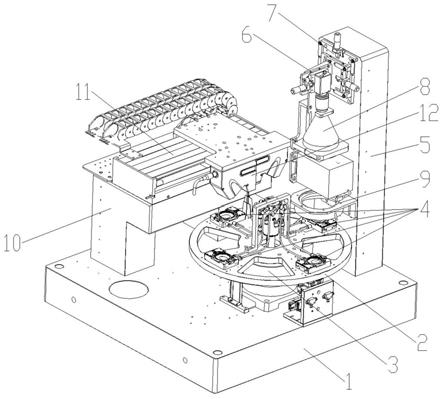
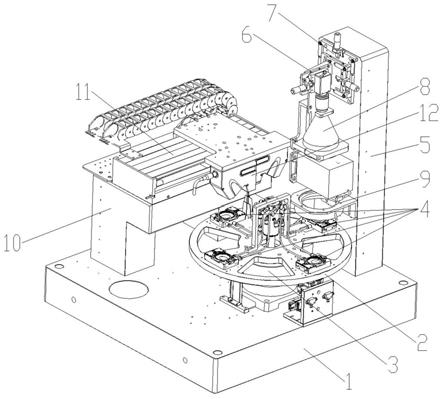
5.本实用新型所采用的技术方案是:本实用新型包括机座、2d检测机构、3d检测机构以及转台机构,所述2d检测机构和所述3d检测机构均设置在所述机座上,所述转台机构包括转盘、电动马达以及若干个载具,所述电动马达设置在所述机座上,所述转盘设置在所述电动马达的输出端,若干个所述载具环绕设置在所述转盘上,待测试产品设置在所述载具上,当所述电动马达驱动所述转盘转动后,所述载具依次经过所述2d检测机构和所述3d检测机构的检测端。
6.由上述方案可见,先把待测试产品放置到所述载具上,然后驱动所述电动马达,带动所述转盘转动一定角度,所述载具上的待测试产品转动到所述2d检测机构的检测端进行2d检测,完成2d检测后所述电动马达再次驱动所述转盘转动一定角度,所述载具上的待测试产品再转动到所述3d检测机构的检测端进行3d检测,完成3d检测后所述电动马达再次驱动所述转盘转动一定角度,最后再从所述载具中取出已完成测试的产品,并且将另一待测试产品放置到所述载具上,依照上述步骤继续进行检测,从而实现产品的连续性测试。因此,本实用新型不仅结构简单,而且自动化程度高,大大地提高了产品的工作效率,适用于工厂的大批量生产测试,并且避免了人工检测失误率,大大提升了检测精度,可靠性高,实用性强。
7.进一步地,所述2d检测机构包括支撑座、x轴微调滑台、yz轴微调滑台、ccd相机以及光源,所述支撑座竖直设置在所述机座上,所述yz轴微调滑台设置在所述支撑座上,所述x轴微调滑台设置在所述yz轴微调滑台的活动端,所述ccd相机设置在所述x轴微调滑台的活动端,所述光源设置在所述支撑座上并且位于所述ccd相机的下方。由此可见,在进行产品检测前,先对所述ccd相机的位置进行调节,确保所述ccd相机精准对焦,再对产品进行拍照检测,其中通过手动调节所述yz轴微调滑台的调节杆来对ccd相机进行y轴方向和z轴方向的滑动调节,通过手动调节所述x轴微调滑台的调节杆来对ccd相机进行x轴方向的滑动调节。
8.进一步地,所述3d检测机构包括底座、x轴直线模组以及激光扫描仪,所述底座设置在所述机座上,所述x轴直线模组设置在所述底座上,所述激光扫描仪设置在所述x轴直线模组的活动端。由此可见,在进行产品检测前,先对所述激光扫描仪的位置进行调节,确保所述激光扫描仪的扫描器与产品精准对位,再对产品的尺寸及形状进行扫描检测,其中通过驱动所述x轴直线模组来对所述激光扫描仪进行x轴方向的滑动调节。
9.进一步地,所述载具的数量设置有四个。由此可见,四个所述载具环绕设置在所述转盘上,分别位于不随所述转盘转动而改变位置的工位一、工位二、工位三以及工位四上。
10.进一步地,所述一种自动化光学检测机台还包括机箱和操作模块,所述机座、所述2d检测机构、所述3d检测机构以及所述转台机构均设置在所述机箱内,所述操作模块包括人机操作界面和显示屏,所述人机操作界面和所述显示屏均设置在所述机箱的前侧面,所述显示屏位于所述人机操作界面的上方,所述2d检测机构和所述3d检测机构均与所述人机操作界面信号连接,所述2d检测机构和所述3d检测机构均与所述显示屏信号连接。由此可见,所述人机操作界面可以控制所述2d检测机构和所述3d检测机构分别对产品进行2d和3d检测,而拍摄到的产品图片、扫描到的产品尺寸以及形状均可以在所述显示屏上显示出来。
11.进一步地,所述机箱的顶部设置有空气净化器。由此可见,所述空气净化器可以吸附、分解或转化设备工作过程中所产生的各种空气污染物,从而有效提高空气清洁度。
12.进一步地,所述机箱的左侧面设有散热口。由此可见,所述散热口便于所述机箱内部的工作设备进行散热。
13.进一步地,所述机箱的顶部设置有报警灯。由此可见,当本检测机台在工作过程中出现异常时,所述报警灯便会闪烁,起到报警作用。
附图说明
14.图1是本实用新型的立体图;
15.图2是所述机箱的立体图。
具体实施方式
16.如图1和图2所示,在本实施例中,本实用新型包括机座1、2d检测机构、3d检测机构以及转台机构,所述2d检测机构和所述3d检测机构均设置在所述机座1上,所述转台机构包括转盘2、电动马达3以及四个载具4,所述电动马达3设置在所述机座1上,所述转盘2设置在所述电动马达3的输出端,四个所述载具4环绕设置在所述转盘2上,待测试产品设置在所述载具4上,当所述电动马达3驱动所述转盘2转动后,所述载具4依次经过所述2d检测机构和
所述3d检测机构的检测端。
17.在本实施例中,四个所述载具4分别位于不随所述转盘2转动而改变位置的工位一、工位二、工位三以及工位四上。
18.在本实施例中,所述2d检测机构包括支撑座5、x轴微调滑台6、yz轴微调滑台7、ccd相机8以及光源9,所述支撑座5竖直设置在所述机座1上,所述yz轴微调滑台7设置在所述支撑座5上,所述x轴微调滑台6设置在所述yz轴微调滑台7的活动端,所述ccd相机8设置在所述x轴微调滑台6的活动端,所述光源9设置在所述支撑座5上并且位于所述ccd相机8的下方。所述ccd相机8位于工位二的上方,能够对工位二上的产品进行拍摄检测。
19.在本实施例中,所述3d检测机构包括底座10、x轴直线模组11以及激光扫描仪12,所述底座10设置在所述机座1上,所述x轴直线模组11设置在所述底座10上,所述激光扫描仪12设置在所述x轴直线模组11的活动端。所述激光扫描仪12位于工位三的上方,能够对工位三上的产品进行扫描检测。
20.在本实施例中,所述一种自动化光学检测机台还包括机箱13和操作模块,所述机座1、所述2d检测机构、所述3d检测机构以及所述转台机构均设置在所述机箱13内,所述操作模块包括人机操作界面14和显示屏15,所述人机操作界面14和所述显示屏15均设置在所述机箱13的前侧面,所述显示屏15位于所述人机操作界面14的上方,所述2d检测机构和所述3d检测机构均与所述人机操作界面14信号连接,所述2d检测机构和所述3d检测机构均与所述显示屏15信号连接。
21.在本实施例中,所述机箱13的顶部设置有空气净化器16。
22.在本实施例中,所述机箱13的左侧面设有散热口17。
23.在本实施例中,所述机箱13的顶部设置有报警灯18。
24.在本实施例中,本实用新型的工作原理如下:
25.先把1号产品放置到工位一的载具4上,然后驱动所述电动马达3,所述转盘2逆时针转动90
°
,使1号产品转动到工位二上进行2d检测,同时操作员在工位一的载具上放置2号产品。
26.当1号产品完成2d检测后,所述电动马达3再次驱动所述转盘2逆时针转动90
°
,使1号产品到达工位三上进行3d检测,2号产品到达工位二上进行2d检测,同时操作员在工位一的载具4上放置3号产品。
27.当1号产品完成2d检测并且2号产品完成2d检测后,所述电动马达3再次驱动所述转盘2逆时针转动90
°
,使1号产品到达工位四上,2号产品到达工位三上进行3d检测,3号产品到达工位二进行2d检测,同时操作员在工位一的载具4上放置4号产品。
28.当2号产品完成3d检测并且3号产品完成2d检测后,所述电动马达3再次驱动所述转盘2逆时针转动90
°
,使2号产品到达工位四上,3号产品到达工位三上进行3d检测,4号产品到达工位二上进行2d检测,而1号产品到达工位一上,此时先将完成所有测试的1号产品取出,再把5号产品放置到工位一的载具4上。
29.按照上述操作依此循环,依次在工位一的载具4上取出已测产品和放置待测试产品,从而实现产品的连续性检测,大大提高检测效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。