1.本实用新型涉及水产养殖技术领域,尤其是一种蜂巢式自动养殖系统。
背景技术:
2.目前,国家对大江大河实施禁渔保护,不允许在大江内捕鱼,不允许在重要水体进行人工养殖,仅依靠原来的池塘散养模式难以维持水产产量;鱼塘散养模式由于饲料残余和养殖对象排泄物导致水体污染,大量使用抗生素对抗鱼病,这样的养殖条件导致养殖品质不高。为解决当前矛盾,必须进行高密度养殖以在养殖水域大面积减少的情况下提高水产品产量和质量。
3.在池塘等大区域很难进行高密度养殖,因为需要调节水环境因子的范围过大,很难调控均匀,现高密度养殖一般只在圆形或方形小区域内进行。高密度养殖对水体质量要求高,需要机械增氧和主动水循环,并及时排出废物,否则由于水质不良短时间内养殖对象就会大量死亡。一套水质传感器价格数万,长期放置于水中容易因藻类生长附着而失效,寿命一般只有3
‑
6个月,成本远远高于养殖利润,因此目前高密度养殖一般都采用开环控制,持续进行增氧和水循环,能耗大,养殖成本高。
技术实现要素:
4.本实用新型所要解决的技术问题是提供一种蜂巢式自动养殖系统,克服现有的大区域水体不能高密度养殖的缺陷及高密度养殖传感器成本高、能耗大的缺点。
5.为解决上述技术问题,本实用新型所采用的技术方案是:
6.一种蜂巢式自动养殖系统, 包括蜂巢养殖箱、固体废物集排系统、水循环系统、移动监测船;
7.所述蜂巢养殖箱为蜂巢结构,在蜂巢养殖箱的每个侧板上端开有缺口,活动浮门与缺口滑动配合并可沿缺口上下移动;
8.所述固体废物集排系统包括多个集污漏斗,每个集污漏斗上端与蜂巢养殖箱的腔室一一对应连接,每个集污漏斗下端与排污管道连接并通过活动格栅过滤,排污管道另一端与吸污泵连接,吸污泵排出废物;
9.所述水循环系统包括主水管,主水管的出水端与多个分支喷管连接,分支喷管位于蜂巢养殖箱的腔室内且从上往下分布;主水管的进水端与输水管、增压水泵依次连接,增压水泵引入富氧水;
10.所述移动监测船包括船体,船体上安装有螺旋桨、集成型传感器、电源
‑
无线定位及控制模块,其中,螺旋桨带动船体运行,由第二舵机带动螺旋桨左右偏转实现船体转向,集成型传感器通过第一舵机驱动伸入水中或伸出水面;
11.所述集成型传感器用于测量水体的溶解氧、氨氮含量、溶解盐、ph值、水的透明度及温度;
12.电源
‑
无线定位及控制模块用于接收集成型传感器传递的信号并无线发送。
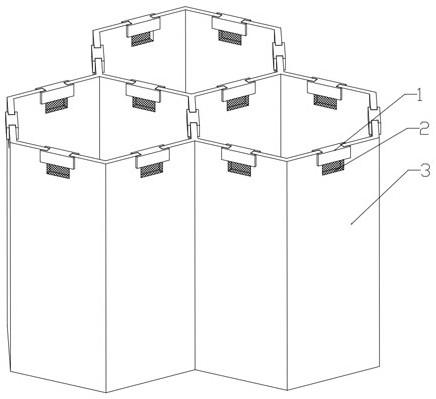
13.所述活动浮门下端固定有渔网,渔网与蜂巢养殖箱的内外壁贴合。
14.所述蜂巢养殖箱采用玻璃钢制成。
15.所述活动浮门整体为h字形结构。
16.所述集污漏斗为六棱锥结构,上端粗、下端细且侧壁保持30
°‑ꢀ
40
°
倾角。
17.所述输水管上安装有文丘里混合器。
18.所述分支喷管为环形管且环形管上周向开有多个斜喷水孔。
19.所述船体为双体船且前端设有向上翘起的翘板。
20.所述船体上方固定有机架,其中,防水航空电机驱动的螺旋桨安装在机架上。
21.本实用新型一种蜂巢式自动养殖系统,具有以下技术效果:
22.1)、通过引入蜂巢结构,蜂巢养殖箱模仿蜂巢形状,将大区域水体分割成数个小区域,其上部六棱柱部分用于鱼体养殖,利用水循环系统进行强制曝气和水流循环,避免大面积水域水流不方便控制问题,而下部六棱锥部分可收集和排放废料;该结构优化了圆柱型养殖箱的鱼塘面积利用不充分和每个养殖箱没有共用边界的问题,有利于提高鱼塘单位面积的利用率,使圈养箱间没有未利用的空间,并且相邻蜂巢养殖箱可共用隔板,大大节约了建设经费。同时正六边形蜂巢养殖箱比同面积的四边形养殖箱周长少,因此材料投入少,并且蜂巢养殖箱可共用相邻隔板,减少了材料投入;正六边形蜂巢养殖箱内角120
°
,避免了四边形的90
°
水力死角,可使循环水各处流布,保证各处水质均一。
23.2)、通过在蜂巢养殖箱上设置可升降的活动浮门,方便移动监测船的进出,引入的移动监测船可巡航检测各蜂巢养殖箱水质以进行实时调控;且移动监测船避免了在各蜂巢养殖箱的各个腔室内单独布置固定检测装置的昂贵投入,降低了检测成本;利用移动监测船的位置信息和检测信息可对特定蜂巢养殖箱水环境按需进行实时调控,在保证水质的同时降低了能耗。
附图说明
24.下面结合附图和实施例对本实用新型作进一步说明:
25.图1为本实用新型的系统框图。
26.图2为本实用新型中蜂巢养殖箱的结构示意图。
27.图3为本实用新型中蜂巢养殖箱与固体废物集排系统、水循环系统的连接示意图。
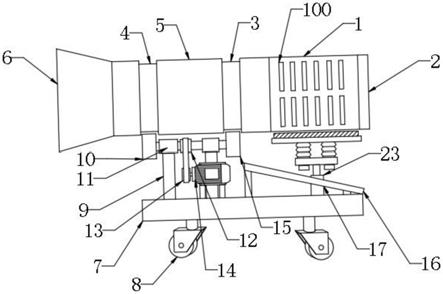
28.图4为本实用新型中移动监测船的结构示意图。
29.图5为本实用新型中移动监测船的电控框图。
30.图中:蜂巢养殖箱100,固体废物集排系统200,水循环系统300,移动监测船400,活动浮门1,渔网2,侧板3,增压水泵4,文丘里混合器5,主水管6,分支喷管7,集污漏斗8.1,排污管道8,活动格栅9,吸污泵10,输水管11,防水航空电机驱动的螺旋桨12,第一舵机13,机架14,集成型传感器15,船体16,第二舵机17,翘板18,电源
‑
无线定位及控制模块19。
具体实施方式
31.如图1所示,一种蜂巢式自动养殖系统,由蜂巢养殖箱100、固体废物集排系统200、水循环系统300、和移动监测船400构成。
32.如图2所示,蜂巢养殖箱100为蜂巢结构,由多个空腔六棱柱组成。每个空腔六棱柱
棱长2
‑
3m,深度根据池塘水位来确定,蜂巢养殖箱100高出水面约0.1m。蜂巢养殖箱100的每个侧板3顶端开有缺口,缺口处设有活动浮门1,活动浮门1为h形,表面相对光滑,活动浮门1左右两端的凹槽与缺口滑动配合。活动浮门1的密度比水小,不受外力时浮于水面。而活动浮门1下端前后与渔网2相连,两渔网2与侧板3内外壁贴合。
33.当移动监测船400前行至活动浮门1处时,船前侧翘板18下压活动浮门1使渔网2松弛,活动浮门1没入水中,移动监测船400可以顺利通过活动浮门1。等到船行驶过活动浮门1后,浮门所受压力消失,活动浮门1自然浮起,渔网2拉伸并恢复原先状态。活动浮门1与渔网2配合设计不仅可以使移动监测船400方便进入蜂巢养殖箱内完成检测,并且可防止鱼的逸出。另外还可方便蜂巢养殖箱100内外上表面进行水体交换。
34.如图3所示,固体废物集排系统200包括集污漏斗8.1,集污漏斗8.1与蜂巢养殖箱100的六棱柱一一对应并连接成整体。集污漏斗8.1为六棱锥结构,六棱锥侧壁表面光滑,保持30
°‑ꢀ
40
°
倾角。这样有利用重力将残饵和粪便等比水重的固体废物自然沉淀并缓落滑落至集污漏斗8.1底部。在集污漏斗8.1底部安装有活动格栅9,活动格栅9下部连接排污管道8及吸污泵10。排污管道8从集污漏斗8.1底部延伸至水面上,将固体废物排放至过滤塔过滤并收集。
35.如图3所示,水循环系统300包括冲水管系、输水管11和增压水泵4。冲水管系由主水管6和多根圆形分支喷管7组成。分支喷管7的安装数量由箱体高度决定,主水管6内径为5cm的pvc管道,主水管6竖直放置于蜂巢养殖箱的每个六棱柱内侧壁上。在主水管6沿竖直方向上等距安装多根内径为2.5cm的圆形分支喷管7,分支喷管7上每隔10cm开一个直径为0.5cm左右的斜喷水孔以形成环流。通过控制增压水泵4将池塘表面水与外界氧源在文丘里混合器5内混合,得到富氧水,并将富氧水输入主水管6,分别流向3个分支喷管7,富氧水流自底而上流动,溢出的水则通过渔网2外流,实现蜂巢养殖箱100内富氧水的供给及流动。
36.如图4所示,移动监测船400包括:船体16、集成型传感器15、电源
‑
无线定位及控制模块19。
37.船体16为双体船,双体船抗浪,稳定性好。在船体16上固定有机架14,机架14上安装有由防水航空电机驱动的螺旋桨12,防水航空电机另一端通过连接板与第二舵机17的输出端连接,防水航空电机驱动的螺旋桨12通过第二舵机17驱动换向。防水航空电机驱动的螺旋桨12不在水中可防止伤害养殖对象。
38.在船体16中间空间安装集成型传感器15,集成型传感器15通过第一舵机13带动转动。在检测时,利用第一舵机13旋转将集成型传感器15放入水体;不检测时,利用第一舵机13将集成型传感器15抬离水面,减少水藻滋生的机会,也方便移动监测船400在蜂巢养殖箱100内移动。
39.集成型传感器15通过pcb板将溶解氧、氨氮含量、溶解盐、ph值、水的透明度、温度等多个传感器集成在一起。
40.集成型传感器15可采用amt
‑
w400多参数水质传感器,可自由组合安装2
‑
7个水质传感器,监测因子包括:温度、ph、orp、电导率、盐度、溶解氧、浊度、叶绿素a、蓝绿藻、若丹明、水中油、氨氮、等。
41.所述电源
‑
无线定位及控制模块19中采用的电池为24v大容量航空锂电池,通过稳压芯片对控制系统提供3.3v、对集成型传感器15提供12v,对防水航空电机、第一舵机13、第
二舵机17提供22.2v供电。
42.电源
‑
无线定位及控制模块19中的无线定位模块uwb为现有的蓝点无限bp
‑
twr
‑
50 高精度定位模块,可以直接定位。
43.电源
‑
无线定位及控制模块19中的控制模块为stm32
‑
f103单片机。
44.电源
‑
无线定位及控制模块19中的控制模块还连接有信号传输天线,所述信号传输天线采用如az
‑
004g01型超强信号传输天线,具有频段范围广,阻抗低等优点。所述信号传输天线与遥控器的信号接收天线无线连接。
45.遥控器通过信号接收天线发射控制信号给信号传输天线,可以控制stm32
‑
f103单片机驱动防水航空电机、第一舵机13、第二舵机17工作。
46.集成型传感器15通过通信协议将数据传给电源
‑
无线定位及控制模块19, 电源
‑
无线定位及控制模块19对数据进行滤波处理后封装为json格式数据,再利用串口通信将数据传输给esp8266wifi模块,然后利用esp8266wifi模块通过mqtt协议与用户的阿里云iot物联网平台进行通信,使数据传输到阿里云端进行处理,通过手机上微信小程序利用mqtt协议接收数据,进行远端数据监控。
47.根据电源
‑
无线定位及控制模块19中的无线定位模块uwb及集成型传感器15采集的数据决定某一具体位置蜂巢养殖箱100腔室中水循环系统300开启的水量大小和通气量多少以保证水质的情况下降低能耗。
48.电源
‑
无线定位及控制模块19可根据遥控指令或者程序操纵第一舵机13上下偏转实现集成型传感器15上升和下降的控制,利用防水航空电机驱动的螺旋桨正反转控制船体前后运动,操纵第二舵机17带动防水航空电机驱动的螺旋桨左右偏转对船体实现转向控制。
49.遥控用遥控器,采用的是云卓h16遥控器,可以控制无人机、无人船。
50.遥控器设有信号接收天线,信号接收天线采用如az
‑
004g01型超强信号传输天线,具有频段范围广,阻抗低等优点。
51.鱼类从鱼苗期养殖到成熟期过程中养殖系统负责的是为鱼类提供生活环境,检测系统的任务实时监测鱼类生活环境的优劣。
52.选择一期鱼苗的生长周期为例来解释本装置的工作流程及原理:
53.鱼苗放置到蜂巢养殖箱100开始,每天规律性投喂。由移动监测船400每天绕鱼塘巡航,检测鱼类养殖环境中的溶解氧、浑浊度、ph值、浑浊度、溶解盐、氨氮含量和温度等指标,检测完成后上传云端,由用户根据鱼类养殖环境的要求进行调节。
54.1)、鱼苗放置、投喂饵料、捕捞:以每个蜂巢分隔装置生产1
‑
2吨鱼产品为目标产量,根据不同鱼种不同规格的年净增重倍数推算出年初放养量。饵料采用市售的膨化饲料,根据的鱼的习性进投喂。成熟期对鱼进行捕捞。
55.2)、水循环:水循环系统300时刻在运行,确保蜂巢养殖箱100中的水一直处于环状流动状态。当移动监测船400巡航检测。移动监测船400通过携带的电源
‑
无线定位及控制模块19获得其位置,集成型传感器15收集蜂巢养殖箱100的环境因子数据,通过wifi模块传到物联网平台,再将数据利用mqtt协议传输到微信小程序进行处理和显示,根据处理结果,向其他系统发送指令,对蜂巢养殖箱100的环境进行改善,或者人为地利用微信小程序主动向其他系统发送指令。若发送的监测数据显示某地址的蜂巢养殖箱100水中溶解氧较少,则增
加该蜂巢的文丘里混合器5上的气体进口上的外源氧气供给量;若数据显示ph、溶解氧、氨氮含量、温度、浑浊度值等多项指标偏离正常值,则同时增加增压水泵4转速和外源氧气供给量以加速水循环及提高溶氧;若水质良好,则可降低水泵转速及外源氧气供给量以节能降耗。
56.3)、固体废物集排污:每天定时打开固体废物集排系统200上的吸污泵10 3
‑
5分钟进行排污,将固体废物过滤并收集,成为肥料。氨氮等水溶性废物通过蜂巢养殖箱外池塘水体自净化。
57.由于供氧良好,水体循环良好,固体废物能及时清除以避免污染水体,单个蜂巢养殖箱可比同面积池塘散养密度高3
‑
5倍,多个蜂巢养殖箱联合,可在广阔水域大面积高密度养殖。由于利用移动监测船巡航检测,节约了传感器高额固定投入的同时能耗比普通高密度养殖降低20%以上。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。