现实世界交通模型
1.优先权要求
2.本技术要求于2019年8月23日提交的题为“real
‑
world traffic model”的美国专利申请第16/549,643号和于2019年4月15日提交的题为“real
‑
world traffic model”的美国临时专利申请第62/834,269号的权益和优先权,该申请被转让给本专利申请的受让人,并通过引用被并入本专利申请中。
技术领域
3.本公开一般涉及用于生成、更新和/或使用现实世界交通模型的方法、设备和计算机可读介质。
背景技术:
4.高级驾驶员辅助自主系统(adas)可以是部分自主的、完全自主的或向驾驶员提供辅助。目前的adas有相机和超声波传感器,并且有些还包括一个或多个雷达。然而,这些目前的系统独立于其他附近车辆运行,并且每个都执行冗余操作。如果adas系统包含无线通信来共享关于彼此的信息,则可能需要大量时间才能使每个设备都包含此功能。
技术实现要素:
5.用于在第一设备处生成现实世界交通模型的方法的示例。该方法包括在第一设备处获得与接近第一设备的一个或多个设备相关联的第一组设备地图信息,以及在第一设备处获得与接近第二设备的一个或多个设备相关联的第二组设备地图信息。该方法在第一设备处确定第一组设备地图信息和第二组设备地图信息是否包含至少一个公共设备,以及在第一设备处响应于第一组设备地图信息和第二组设备地图信息包含至少一个公共设备的确定,基于第一组设备地图信息和第二组设备地图信息生成设备的现实世界交通模型。
6.生成现实世界交通模型的设备的示例可以包括一个或多个存储器、一个或多个收发器以及通信耦合到一个或多个存储器和一个或多个收发器的一个或多个处理器,其中一个或多个处理器可以被配置为获得与接近第一设备的一个或多个设备相关联的第一组设备地图信息。该一个或多个处理器可以被配置为获得与接近第二设备的一个或多个设备相关联的第二组设备地图信息。该一个或多个处理器被配置为确定第一组设备地图信息和第二组设备地图信息是否包含至少一个公共设备,以及响应于第一组设备地图信息和第二组设备地图信息包含至少一个公共设备的确定,基于第一组设备地图信息和第二组设备地图信息生成设备的现实世界交通模型。
7.用于生成现实世界交通模型的设备的示例。该设备包括用于获得与接近第一设备的一个或多个设备相关联的第一组设备地图信息的部件,以及用于获得与接近第二设备的一个或多个设备相关联的第二组设备地图信息的部件。该设备包括用于确定第一组设备地图信息和第二组设备地图信息是否包含至少一个公共设备的部件,以及用于响应于第一组设备地图信息和第二组设备地图信息包含至少一个公共设备的确定,基于第一组设备地图
信息和第二组设备地图信息生成设备的现实世界交通模型的部件。
8.用于生成现实世界交通模型的示例非暂时性计算机可读介质包括处理器可读指令,其被配置为使得一个或多个处理器获得与接近第一设备的一个或多个设备相关联的第一组设备地图信息,以及获得与接近第二设备的一个或多个设备相关联的第二组设备地图信息。该非暂时性计算机可读介质被配置为使得处理器确定第一组设备地图信息和第二组设备地图信息是否包含至少一个公共设备,以及响应于第一组设备地图信息和第二组设备地图信息包含至少一个公共设备的确定,基于第一组设备地图信息和第二组设备地图信息生成设备的现实世界交通模型。
附图说明
9.参考以下附图描述了非限制性和非穷尽性的方面,其中除非另有说明,否则在各个附图中相同的附图标记指代相同的部分。
10.图1示出了其中可以实现本公开的各个方面的通信环境的示例。
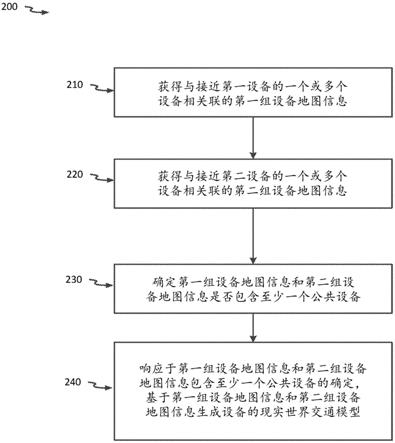
11.图2示出了图示生成和/或更新现实世界交通模型的方法的示例过程图。
12.图3是示出识别公共设备的设备的示例地图。
13.图4是示出生成一个或多个现实世界交通模型的设备的示例地图。
14.图5是示出一个或多个现实世界交通模型的设备的示例地图。
15.图6a是示例设备地图信息。
16.图6b是示出一个或多个现实世界交通模型的设备的示例地图。
17.图7是示出生成、更新和/或查询现实世界交通模型的方法的示例呼叫流程图。
18.图8是示出一个或多个车辆的示例过程图。
19.图9是确定暂时被遮挡的车辆的定位信息的示例过程图。
20.图10a、10b、10c和10d是车辆的示例地图,该示例地图示出暂时遮挡以及如何为该车辆确定定位信息。
21.图11是用于注册暂时与车辆并置以使用现实世界交通模型的设备的示例过程图。
22.图12是在高级驾驶员辅助系统中利用现实世界交通模型的示例过程图。
23.图13是其中可以实现本公开的各方面的示例移动设备和该移动设备内的组件。
24.图14是其中可以实现本公开的各方面的示例服务器和该服务器内的组件。
具体实施方式
25.贯穿本说明书对一个实现、实现方式、实施例等的引用意味着关于特定实现和/或实施例描述的特定特征、结构、特性等被包括在所要求保护的主题的至少一个实现和/或实施例中。因此,例如在整个说明书的不同地方出现这样的短语不一定是指相同的实现和/或实施例或者任何一个特定的实现和/或实施例。此外,应理解,所描述的特定特征、结构、特性等等在一个或多个实现和/或实施例中能够以各种方式组合,并且因此落入预期权利要求范围内。然而,这些和其它问题在特定的使用上下文中有变化的可能性。换言之,贯穿本公开,特定的描述和/或使用上下文提供关于要得出的合理推断的有用指导;然而,同样地,“在该上下文中”在没有进一步限制的情况下一般指代本公开的上下文。
26.另外,附图和附图的描述可以指示可能具有右侧驾驶和/或结构化车道标记的道
路;然而,这些仅仅是示例,并且本公开也适用于左侧驾驶、非结构化道路/车道等。
27.术语“准周期性”指的是以可能不时变化的频率周期性发生的事件,和/或以没有明确定义的频率不时发生的事件。
28.移动设备(例如,图1中的移动设备100)可以被称为设备、无线设备、移动终端、终端、移动站(ms)、用户设备(ue)、安全用户平面定位(supl)使能终端(set)或其他名称,并且可以对应于可移动/便携式设备或固定设备。可移动/便携式设备可以是手机、智能电话、膝上型电脑、平板电脑、pda、跟踪设备、运输车辆、机器人设备(例如,空中无人机、陆地无人机等)或一些其他便携式或可移动设备。运输车辆可以是汽车、摩托车、飞机、火车、自行车、卡车、人力车等。可移动/便携式设备也可以暂时用在运输车辆中和代表运输车辆。例如,智能电话可以用于代表运输车辆进行通信,同时两者暂时并置(这可以与运输车辆的车载设备结合,但不是必需的)。移动设备也可以是固定设备,诸如路侧单元(rsu)、交通灯等。典型地,尽管不是必须的,移动设备可以支持无线通信,诸如使用gsm、wcdma、lte、cdma、hrpd、wifi、bt、wimax等。例如,移动设备也可以支持使用无线lan(wlan)、dsl或分组电缆的无线通信。移动设备可以包括单个实体或者可以包括多个实体,诸如在个人区域网络中,其中在该个人区域网络中用户可以使用音频、视频和/或数据i/o设备和/或身体传感器以及单独的有线或无线调制解调器。移动设备(例如移动设备100)的位置估计也可以被称为位置、位置估计、位置固定、固定、定位、定位估计或定位固定,并且可以是地理性的,从而提供移动设备位置坐标(例如,高度和经度),该位置坐标可以包括或不包括高度分量(例如,高于海平面的高度、高于地平面、地板平面或地下室平面的高度、或低于地平面、地板平面或地下室平面的深度)。可选地,移动设备的位置可以被表示为城市位置(例如,作为邮政地址或建筑物中某个点或小区域的指定,诸如特定的房间或楼层)。移动设备的位置也可以表示为区域或体积(地理地或以城市的形式定义),其中移动设备被期望以一定的概率或置信水平(例如,67%或者95%)被定位在该区域或体积内。移动设备的位置还可以是相对位置,包括例如相对于已知位置处的某个原点定义的距离和方向或相对x、y(和z)坐标,该已知位置可以在地理上或用市政术语定义或者通过参考地图、平面图或建筑平面图上指示的点、区域或体积来定义。在本文包含的描述中,术语位置的使用可以包括这些变型中的任一个,除非另有说明。
29.主体设备是被观察的或被测量的设备,或者是接近本设备(ego device)的设备。
30.本设备是与其环境相关的观察或测量信息,包括与附近主体设备相对应的信息。例如,本车辆可以从其相机获取图像数据并基于该数据执行计算机视觉操作以确定信息,诸如另一设备或车辆(例如主体设备)相对于本设备的定位。
31.托管(或基础设施)通信是指从客户端设备到远程基站和/或其他网络实体的点对点通信,诸如车辆对基础设施(v2i),但不包括车辆对车辆。远程基站和/或其他网络实体可以是最终目的地,或者最终目的地可以是连接到相同或不同远程基站的另一移动设备。托管通信还可以包括基于蜂窝的专用网络。
32.非托管、自组织(ad
‑
hoc)或对等(p2p)通信意味着客户端设备可以直接通信(彼此之间或可以跳过一个或多个其他客户端设备),而无需通过网络实体(例如,网络基础设施,诸如enodeb等)进行通信,以用于车辆通信,诸如车辆对车辆(v2v)和v2i。非托管通信可以包括基于蜂窝自组织网络,例如lte
‑
direct。
33.根据本公开的各方面,设备可以具有用于短距离通信的托管通信能力和对等通信能力,诸如或wi
‑
fi direct,但是p2p并不意味着它具有非托管通信能力,诸如v2v。
34.行程会话可以从车辆开启时到车辆关闭时。在一个实施例中,行程会话可以直到车辆到达目的地。在一个实施例中,行程会话可以由诸如uber或lyft之类的应用定义,因此提供给一个或多个乘客的每次乘车可以被视为行程会话。
35.在结合附图考虑以下详细描述之后,所公开的方法和设备的特征和优点对于本领域技术人员来说将变得更加明显。
36.本文中的系统和技术用于生成、更新和/或使用现实世界的交通模型(rtm)。
37.如图1中所示,在特定实现中,也可以被称为ue(或用户设备)的移动设备100可以向无线通信网络发送无线电信号以及从无线通信网络接收无线电信号。在一个示例中,移动设备100可以通过无线通信链路123通过向蜂窝收发器110发送无线信号或从蜂窝收发器110接收无线信号来与蜂窝通信网络通信,蜂窝收发器110可以包括无线基站收发器子系统(bts)、节点b或演进节点b(enodeb)(对于5g,这将是5g nr基站(gnodeb))。类似地,移动设备100可以通过无线通信链路125向本地收发器115发送无线信号,或者从本地收发器115接收无线信号。本地收发器115可以包括接入点(ap)、毫微微小区、家庭基站、小小区基站、家庭节点b(hnb)或家庭enodeb(henb),并且可以提供对无线局域网(wlan,例如ieee 802.11网络)、无线个人区域网(wpan,例如网络)或蜂窝网络(例如lte网络或其他无线广域网,诸如下一段中讨论的那些)的接入。当然,这些仅仅是可以通过无线链路与移动设备通信的网络的示例,并且所要求保护的主题不限于此。
38.可以支持无线通信链路123的网络技术的示例是全球移动通信系统(gsm)、码分多址(cdma)、宽带cdma(wcdma)、长期演进lte)、高速率分组数据(hrpd)。gsm、wcdma和lte是3gpp定义的技术。cdma和hrpd是由第三代合作伙伴计划2(3gpp2)定义的技术。wcdma也是通用移动电信系统(umts)的一部分,并且可由hnb支持。蜂窝收发器110可以包括为服务(例如,根据服务合同)提供对无线电信网络的订户接入的设备的部署。这里,蜂窝收发器110可以执行蜂窝基站的功能,以服务于至少部分基于蜂窝收发器110能够提供接入服务的范围而确定的小区内的订户设备。可以支持无线通信链路125的无线电技术的示例是ieee 802.11、蓝牙(bt)和lte。
39.在一些实施例中,系统可以使用例如车辆到一切(v2x)通信标准,其中信息可以在设备和耦合到通信网络的其他实体之间传递,该通信网络可以包括无线通信子网。v2x服务可以包括例如以下一项或多项服务:车辆对车辆(v2v)通信(例如,车辆之间通过直接通信接口(诸如基于邻近度的服务(prose)方向通信(pc5)和/或专用短程通信(dsrc)))(其被认为是未托管通信)、车辆对行人(v2p)通信(例如,车辆和诸如移动设备的用户设备(ue)之间的通信)(其被认为是未托管通信)、车辆对基础设施(v2i)通信(例如,车辆和基站(bs)之间或车辆和路侧单元(rsu)之间)(其被认为是托管通信)和/或车辆到网络(v2n)通信(例如车辆与应用服务器之间)(其被认为是托管通信)。v2x包括第三代合作伙伴计划(3gpp)ts 23.285中定义的用于v2x服务的各种操作模式。当v2x实体在彼此的范围内时,一种操作模式可以在v2x实体之间使用直接无线通信。另一种操作模式可以在实体之间使用基于网络的无线通信。如果需要,可以组合以上操作模式或者可以使用其他操作模式。重要的是要注意,这也可以至少部分是专有标准、不同标准或其任意组合。
40.v2x标准可被视为促进高级驾驶员辅助系统(adas),其中还包括完全自主车辆、其他级别的车辆自动化(例如,2级、3级、4级、5级)或在自动驾驶汽车自动化级别中当前未定义的自动化和协调。根据能力,adas可以做出驾驶决策(例如,导航、变道、确定车辆之间的安全距离、巡航/超车速度、制动、停车、排队等)和/或向驾驶员提供可操作的信息以促进驾驶员决策做出。在一些实施例中,v2x可以使用低时延通信,从而促进实时或接近实时的信息交换和精确定位。作为一个示例,定位技术(诸如以下一个或多个:基于卫星定位系统(sps)的技术(例如基于航天器160)和/或基于蜂窝的定位技术(诸如到达时间(toa)、到达时间差(tdoa)或观测到达时间差(otdoa)))可以使用v2x辅助信息来增强。因此,v2x通信可以有助于实现并为移动的车辆、行人等提供高度的安全性。
41.在特定的实现中,蜂窝收发器110和/或本地收发器115可以通过链路145在网络130上与服务器140、150和/或155通信。这里,网络130可以包括有线或无线链路的任何组合,并且可以包括蜂窝收发器110和/或本地收发器115和/或服务器140、150和155。在特定实现中,网络130可以包括互联网协议(ip)或能够通过本地收发器115或蜂窝收发器110促进移动设备100和服务器140、150或155之间的通信的其他基础设施。网络130还可以促进移动设备100、服务器140、150和/或155与公共安全应答点(psap)160之间的通信,例如通过通信链路165。在一个实现中,网络130可以包括蜂窝通信网络基础设施,诸如基站控制器或基于分组或基于电路的交换中心(未示出),以促进与移动设备100的移动蜂窝通信。在特定实现中,网络130可以包括局域网(lan)元件,诸如wlan ap、路由器和网桥,并且在这种情况下可以包括或具有到网关元件的链路,该网关元件提供对广域网(诸如因特网)的接入。在其他实现中,网络130可以包括lan,并且可以接入或不接入广域网,但是可以不向移动设备100提供任何这样的接入(如果支持的话)。在一些实现中,网络130可以包括多个网络(例如一个或多个无线网络和/或因特网)。在一个实施例中,网络130可以包括一个或多个服务网关或分组数据网络网关。此外,服务器140、150和155中的一个或多个可以是e
‑
smlc、安全用户平面位置(supl)定位平台(slp)、supl定位中心(slc)、supl定位中心(spc)、定位确定实体(pde)和/或网关移动位置中心(gmlc),它们中的每一个可以连接到网络130中的一个或多个位置检索功能(lrf)和/或移动性管理实体(mme)。
42.在特定实现中,并且如下所述,移动设备100可以具有能够获得位置相关测量(例如,从gps或其他卫星定位系统(sps)卫星114、蜂窝收发器110或本地收发器115接收的信号的测量),并且可以基于这些位置相关测量来计算移动设备100的定位固定或估计位置的电路和处理资源。在一些实现中,由移动设备100获得的位置相关测量可以被传送到位置服务器,诸如增强服务移动位置中心(e
‑
smlc)或supl位置平台(slp)(例如,其可以是服务器140、150和155之一),之后位置服务器可以基于测量来估计或确定移动设备100的位置。在当前示出的示例中,由移动设备100获得的位置相关测量可以包括从属于sps或全球导航卫星系统(gnss)(诸如gps、glonass、伽利略或北斗)的卫星接收的信号(124)的测量,和/或可以包括从固定在已知位置(诸如蜂窝收发器110)的地面发送器接收的信号(诸如123和/或125)的测量。移动设备100或独立位置服务器然后可以基于这些位置相关测量使用若干定位方法(诸如,例如gnss、辅助gnss(a
‑
gnss)、高级前向链路三边测量(aflt)、观测到达时间差(otdoa)或增强型小区id(ecid)或其组合)中的任何一种来获得移动设备100的位置估计。在这些技术的一些技术中(例如,a
‑
gnss、aflt和otdoa),可以至少部分地基于导频、定
位参考信号(prs)或由发送器或卫星发送并在移动设备100处接收的其他定位相关信号,在移动设备100处测量相对于固定在已知位置的三个或更多地面发送器的伪距或时间差、或者相对于具有精确已知轨道数据的四个或更多卫星的伪距或时间差、或其组合。这里,服务器140、150或155可以能够向移动设备100提供定位辅助数据,包括例如关于待测量信号的信息(例如,信号定时)、地面发送器的位置和身份和/或信号、用于gnss卫星的定时和轨道信息,以促进诸如a
‑
gnss、aflt、otdoa和e
‑
cid的定位技术。例如,服务器140、150或155可以包括历书,该历书指示蜂窝收发器和/或本地收发器在特定区域或多个区域(诸如特定场所)中的位置和标识,并且可以提供描述由蜂窝基站或ap发送的信号的信息,诸如传输功率和信号定时。在e
‑
cid的情况下,移动设备100可以获得对从蜂窝收发器110和/或本地收发器115接收的信号的信号强度的测量和/或可以获得移动设备100和蜂窝收发器110或本地收发器115之间的往返信号传播时间(rtt)。移动设备100可以将这些测量值与从服务器140、150或155接收的辅助数据(例如,地面历书数据或诸如gnss历书和/或gnss星历表信息的gnss卫星数据)一起使用以确定移动设备100的位置,或者可以将测量传送到服务器140、150或155以执行相同的确定。
43.图2是示出生成和/或更新rtm的示例方法的过程图200。
44.在框210处,移动设备100和/或服务器140获得与接近第一设备的一个或多个设备相关联的第一组设备地图信息。第一设备可以是移动设备100(例如,车辆、智能手机等)或无线基础设施(例如接入点115、基站110、路侧单元(rsu)等)。第一设备经由无线通信、相机、传感器、激光雷达(lidar)等方式确定哪些设备与其接近。
45.设备地图信息可以包括每个设备的一个或多个定位信息和每个设备的一个或多个设备标识。例如,设备地图信息可以指定包括车辆绝对坐标和车辆牌照作为标识符的车辆。
46.在一个实施例中,设备地图信息还可以包括本设备的(例如,报告设备的)定位。定位可以是:绝对坐标(例如纬度和经度);十字路口;可见基站、接入点、rsu;最近通过的路口;车道定位(例如,车辆在哪个车道上);或它们的任意组合。
47.特定时间的定位信息可以是测距(例如,在某个时间相对于主体车辆的距离)和/或方位。术语“相对姿态”也用于指车辆相对于主体车辆当前位置的定位和方位。术语“相对姿态”可以指物体(例如目标车辆)相对于以主体(例如主体车辆)的当前定位为中心的参考坐标系的6自由度(dof)姿态。术语相对姿态涉及定位(例如,x、y、z坐标)和方位(例如,滚动、俯仰和偏航)。坐标系可以居中:(a)在主体车辆上,或(b)在获取目标车辆图像的(多个)图像传感器上。此外,因为车辆在道路上的运动通常是短距离的平面运动(即垂直运动受到限制),所以在一些情况下,姿态也可以以较小的自由度(例如3dof)来表示。降低可用自由度可以促进计算目标车辆距离、目标车辆相对姿态以及与目标车辆相关的其他定位参数。
48.一个或多个定位信息可以包括距离、方位、距离角、rf特性、绝对坐标、速度、定位不确定性、置信水平、定位测量或其任意组合。
49.例如,定位信息可以包括距离,该距离指示与本设备或另一设备的距离(例如,相对定位)。这可以用任何单位和/或任何分辨率来表示。例如,它可以表示为米、厘米、英寸等。
50.位置信息可以包括方位。例如,报告设备可以报告物体或被测设备相对于报告设
备的方位和/或它可以提供绝对方位(例如,相对于磁北)。
51.在一个实施例中,定位信息可以包括包含距离和距离角的矢量。该矢量可以是相对于本设备、物体或另一设备的。例如,矢量可以相对于高速公路沿线的广告牌。
52.在一个示例中,定位信息可以包括rf特性。rf特性可以包括信号强度、往返时间、到达时间差、多普勒频移或其任意组合。
53.在一个示例中,定位信息可以包括绝对坐标。绝对坐标可以是纬度、经度和/或海拔。绝对坐标可以是笛卡尔坐标。
54.术语“多普勒偏移”或“多普勒频移”或“多普勒效应”是指由于接收器和发送器之间的相对运动,所观察到的接收到的信号(例如,在接收器处)的频率相对于发送的信号(例如,通过发送器)的频率的变化。多普勒测量可用于确定主体车辆(例如v2v通信的接收器)和目标车辆(例如v2v通信的发送器)之间的范围变化率。范围变化率是指在一段时间内主体车辆和目标车辆之间的范围或距离的变化率。因为v2x、蜂窝和其他通信的标称频带是已知的,所以多普勒频移可以被确定并用于计算范围速率和其他运动相关参数。
55.定位信息还可以包括定位位置特性,诸如定位不确定性和/或置信水平。例如,定位不确定性可以包括精度的水平稀释。置信水平可以指示本设备在定位估计、用于进行测量的技术或其任意组合中可能具有的置信度。
56.设备标识可以包括全球唯一标识符、本地唯一标识符、接近度唯一标识符、相对唯一标识符、一个或多个设备标识特性或其任意组合。
57.全球唯一标识符可以包括全球唯一牌照、具有地区标识符的牌照、媒体访问控制(mac)地址、车辆识别信息(vin)和/或一些其他标识符。地区标识符可以指示牌照标识符是在哪里发布的,从而使其全球唯一。例如,牌照“5lof455”可以是在加州发布的,所以带有加州地区标识符的牌照会产生一个全球唯一的标识符。
58.本地唯一标识符可以包括牌照、vin或一些其他标识符。本地唯一标识符能够在不同的地区中再次使用。例如,牌照标识符诸如“5lof455”在加州可能是唯一的,但也可以在不同的地区(诸如华盛顿)重复。该地区可以具有任何尺寸或形状。例如,该地区可以是大洲、国家、州、省、县、邮政编码、社区、街道、十字路口等。
59.接近度唯一标识符可以是距离和/或时间阈值内的唯一标识符。例如,设备可以报告在一百米内可能是唯一的附近车辆。例如,设备可以报告在三十秒内可能是唯一的附近车辆。距离阈值和时间阈值可以是任何单位和/或分辨率。
60.相对唯一标识符可以是由本设备确定的设备的唯一标识符。例如,无线路侧单元(rsu)可以与多个车辆通信,并在它们与rsu通信时为它们分配唯一的ip地址,因此设备可以具有相对唯一标识符(例如,ip地址)。
61.在一个实施例中,设备标识符可以包括一个或多个设备特性。设备特性可以包括设备的品牌、型号、颜色、设备年份、设备装饰、设备的一个或多个尺寸、设备的形状、设备的一个或多个性能(例如转弯半径)、设备的一个或多个可观察到的特性、adas系统的软件类型或版本、行程相关信息(例如乘客计数、当前位置、目的地)、车辆行为(矢量加速度、速度、位置、制动状态、转向灯状态、倒车灯状态等)、其他信息(如紧急代码
‑
诸如上班迟到、车辆使用代码(诸如报纸投递、垃圾车、观光/旅游、出租车等))、或其任意组合。
62.例如,本设备可以将附近的主体车辆识别为本田思域,并确定它是附近或在本设
备的视线内的唯一本田思域。然后,本设备可以使用“本田思域”作为设备标识符。
63.本设备可能识别两个附近车辆都是本田思域,但是可以使用车辆的颜色来进一步区分它(例如,一辆车是黑色的,另一辆车是银色的)。
64.在另一示例中,可能有两辆车都是本田思域,但可以根据它们的年份和/或装饰进行区分。例如,一辆本田思域可能是2018款,但另一辆本田思域可能是2005款。在一个实施例中,车辆的形状要素(form factor)在多个年份中可以是相似的,因此它可以提供潜在年份的范围而不是提供特定年份。
65.此外,年份的颜色可用于识别或缩小可能与车辆相关联的潜在制造年份(或销售年份)。例如,米色可能是第一年的颜色选择,但在接下来的三年中,对于这种形状要素没有使用米色。
66.在一个实施例中,可以用于识别制造年份(或销售年份)的形状要素可能有微小的变化。例如,轮辋/轮毂盖、灯等可能会有轻微的调整。
67.设备装饰也可用于识别设备。例如,第一车辆可以是第二车辆的相同品牌和型号;然而,第一车辆可以是标准装饰,但是第二车辆可以是豪华装饰,这可以基于各种因素来指示,诸如前灯、车顶配置(例如全景车顶、横杆等)、扰流板、制造商标记等。
68.(多个)设备尺寸可用于识别附近车辆,诸如宽度、高度、长度、形状要素(例如车辆类型)、车辆的3d模型或其任意组合。例如,可能有两个类似的车辆,诸如它们具有相同的品牌和/或型号,但是一个车辆可能已经被修改(例如拖车包装),导致其具有与另一个车辆不同的尺寸。然后不同的尺寸可用于区分这两个车辆。这可以是临时的区别标识符,直到两个车辆不再接近或者直到不再需要临时的区别标识符。
69.在一个实施例中,本设备可以基于由汽车制造商、原始设备制造商(oem)、辖区、其他本设备、服务器或其任意组合指定的规则,使用设备标识符来报告附近设备。例如,本田可能会指定其所有设备使用设备特性(例如,品牌、型号、年份、颜色等)报告附近设备。在另一示例中,oem可以指定本设备使用附近设备的牌照来报告附近设备。
70.本设备可以基于司法管辖区报告所识别的附近设备。例如,如果本设备在加利福尼亚,它可以使用加利福尼亚规则(可以用于遵守加利福尼亚和/或美国法律)来报告所识别的附近设备(例如设备特性)。在另一示例中,如果本设备是为特定司法管辖区制造的,或者位于特定司法管辖区(例如中国),它可以使用vin和/或牌照或司法管辖区政策(例如,ip地址,并且ip地址是临时的且每十英里更改一次)报告所识别的附近设备。
71.本设备可以基于其他本设备如何报告它们的附近设备来报告所识别的附近设备。例如,如果第一本设备使用设备特性来报告附近设备,那么第二本设备也可以使用设备特性来报告附近设备。在另一示例中,如果第一本设备使用设备特性报告附近设备,但是第二本设备使用牌照报告附近设备,则第一本设备可以调整并且也使用牌照报告附近设备。
72.本设备还可以基于来自服务器或具有适当权限(例如,执法、紧急响应)的其他附近设备的指令来报告所识别的附近设备。例如,服务器可以指示特定区域中的所有本设备使用设备特性来报告返回附近设备。在一些情况下,服务器可以指示本设备使用不同的设备标识符(例如,牌照)来报告返回。当设备标识符之间存在歧义时或者在紧急情况下,这可能是有用的。
73.在一个实施例中,除了附近设备之外,本设备还可以报告非设备。例如,它可以确
定还包括行人、骑自行车者、标志、道路状况、交通灯等的设备地图信息。重要的是要注意,一些交通灯可能包括使其能够成为rsu或服务器的功能,在这种情况下,交通灯将被包括为设备,但是不能与附近设备通信和/或感测附近设备的交通灯将被归类为非设备;对于这些其他非设备,诸如行人、自行车等,这是相似的。在一个实施例中,如果行人和/或骑自行车者携带由本设备识别的设备,则它可以被报告为设备,但是它也可以报告非设备(例如,行人),并且它可以提供设备标识符和/或非设备标识符(例如,行人的彩色衬衫)。
74.根据本公开的一方面,非设备信息还可以包括特性。例如,本设备可以确定与十字路口的交通灯相关联的特性,诸如交通灯状态(例如,红色、黄色、绿色)、光强度、它是否在闪烁等。这些特性可以被提供给设备地图信息,并且可以被提供在rtm中,因此第二设备可以基于该信息做出决策。例如,如果交通灯为绿色已经持续了一分钟,则rtm指示交叉口附近的车辆已经移动了最后一分钟,但是第二车辆前面的汽车没有移动,则第二车辆可以经由其行为/路线规划(也可以包括运动和路径规划)组件来确定第二车辆移动到另一个车道。此外,出于各种目的,诸如但不限于确定何时需要更换交通灯、何时交通灯不可靠等,可以将该信息提供给第三方,诸如交通灯的操作者(例如,城市、自治市)。
75.也可以有多个与运输车辆并置的设备。在这种情况下,这些设备中的一个或多个可以报告设备地图信息,或者可以在信息被发送到不与运输车辆并置的设备之前挑选核对该信息的领导或头部设备。例如,在单个车辆中可能有四个用户,每个用户都有智能电话,因此每个设备可以用于识别附近设备和非设备,并且该信息可以被发送到设备以生成rtm。
76.本设备可以报告其能力和/或缺点,作为设备地图信息的一部分,和/或单独地报告其能力和/或缺点。例如,本设备可以是车辆,并且它可以指示它只有前置相机,因此无法检测到不在其前面的附近设备。
77.在另一示例中,本设备可以指示它具有前置相机、gnss、设备周围的超声波传感器和前置雷达系统。在这种情况下,这表明本设备可以具有与其位置相关联的可靠不确定值(由于gnss接收器),但它可能只能看到它前面的设备,因为超声波传感器可能需要极为贴近来检测其他附近设备。
78.本设备可以指示它能够感测的一个或多个区域和/或它能够识别附近设备和/或非设备的一个或多个区域。这可以基于基本(cardinal)方向、基点间(intercardinal)方向、相对于基本方向或基点间方向的角度(例如北)等来指示。例如,如果本设备具有前置相机和后置相机,则它可以指示它能够感测或识别从西北到东北和南方的附近设备和/或非设备。该信息可以在设备地图信息中和/或单独指示。
79.在一个实施例中,本设备可以指示它不能够感测的一个或多个区域和/或它不能够识别附近设备和/或非设备的一个或多个区域,并且可以如上所述类似地执行并贯穿整个说明书。
80.本设备可以提供与设备能力相关的可靠性信息。例如,如果本设备确定前置相机间歇性地无法接收图像数据,则本设备可以基于何时无法接收图像数据、当前是否能够接收图像数据、其他传感器是否检测到在图像数据中没有或没有被识别的物体等来确定可靠性分数。在另一示例中,本设备可以确定相机图像数据在某些天气条件(例如雨、雪、雾等)或与天气状况相关的时间(例如,在该天气状况存在时开启设备的前三十分钟内)不能检测到任何物体,因此本设备可以为设备的相机能力设置低可靠性分数。该信息可以在设备地
图信息中和/或单独指示。
81.在一个实施例中,正在识别附近设备的本设备可以基于来自附近设备的信息来增强其一个或多个附近设备的标识信息和/或特性信息。例如,附近设备可以具有托管通信能力(但不具有非托管通信能力),其中它可以提供关于自身的信息,诸如型号、品牌、颜色等。它还可以提供定位信息,诸如纬度/经度、地标、十字路口等。需要注意的是,附近设备可能会报告大致的附近区域或具有较大不确定性的精确位置,以说明附近设备的潜在移动(以及直到下一个潜在报告的潜在移动)。本设备可以检索该信息,并基于该信息调整其对附近设备的分类。例如,如果本设备已经确定附近设备是“黑色本田雅阁”,但是检索到的信息指示本设备附近的唯一本田雅阁是“蓝色本田雅阁”,则本设备可以将其设备分类改变为“蓝色本田雅阁”。在一个实施例中,本设备可以在设备分类信息中指示关于这种变化的信息,因为另一个设备可能将同一车辆感知为黑色,而实际上它是蓝色的,所以这可以避免在生成和使用rtm时的模糊性。
82.在一个实施例中,服务器可以从附近设备接收附近设备的设备特性、行程相关信息、车辆行为信息和/或定位信息,并且服务器可以在从本设备接收的设备地图信息中增强关于附近设备的信息。
83.另外,服务器可以接收与已经接收到测量的区域相关的信息,并且它可以指示没有车辆存在。服务器可以从rsu、行人等接收该信息。
84.根据本公开的一方面,每个本设备可以使用不同的标识符来报告所识别的附近设备。例如,第一本设备可以使用设备特性报告附近设备,并且第二本设备可以使用牌照报告同一附近设备。
85.在框220处,移动设备100和/或服务器140获得与接近第二设备的一个或多个设备相关联的第二组或更多组设备地图信息。第二设备可以是移动设备100(例如,车辆、智能手机等)或无线基础设施(例如接入点115、基站110、路侧单元(rsu)、边缘设备等)。第一设备经由无线通信、相机、传感器、lidar等方式确定哪些设备与其相邻。
86.在框230处,移动设备100和/或服务器140确定第一组设备地图信息和第二组设备地图信息是否包含至少一个公共设备。在一个实施例中,设备可以基于标识符来识别一个或多个公共设备。
87.根据本公开的一方面,设备是否是公共设备的确定可以基于对应于第一组设备中的设备的一个或多个特性与对应于第二组设备中的设备的一个或多个特性的比较。例如,移动设备100和/或服务器140可以在第一组设备地图信息中找到包括以下特性的设备:“本田”、“思域”、“黑色”、“2018”并且第二组设备地图信息中的设备包括相同的特性,则移动设备100和/或服务器140可以将第一组设备地图信息和第二组设备地图信息中的设备分类为相同的设备,并且因此是两组设备地图信息之间的公共设备。这些特性可以基于lidar数据或lidar数据、超声波数据、雷达数据和/或相机数据的任意组合。可以基于lidar数据、其他传感器数据或任意组合来检测形状要素,并且可以从形状要素(例如,“2015
‑
2018本田思域”)中导出设备特性。
88.在一个实施例中,设备是否是公共设备的确定基于在第一组设备地图信息中设备的接近度和在第二组设备地图信息中设备的接近度。例如,移动设备100和/或服务器140可以基于第一组设备地图信息设备的定位和第二组设备地图信息的定位来识别设备是否是
公共设备。如果定位相似或非常接近,以至于可能需要设备彼此重叠,则移动设备100和/或服务器140可以将第一组设备地图信息设备和第二组设备地图信息设备分类为同一设备(例如,公共设备)。
89.根据本公开的一方面,移动设备100和/或服务器140可以确定第一组设备地图信息和第二组设备地图信息是否包含该至少一个公共设备,还包括确定第一组设备地图信息的时间戳和第二组设备地图信息的时间戳是否在时间阈值内。例如,如果第一组设备地图信息比第二组设备地图信息早几分钟,但是时间阈值高达一分钟,则移动设备100和/或服务器140可以忽略在第一组设备地图信息找到的任何公共设备,直到获得更新版本。
90.在一个实施例中,设备可以使用附加信息来识别一个或多个公共设备,诸如如果它识别出公共设备模糊性。
91.在一个实施例中,现实世界地图可用于确定车辆的更新的标识符。例如,在已经生成了现实世界地图之后,设备可确定附近设备的标识符对于其他附近设备可能是模糊的。虽然在已经生成地图之后标识符可以是“本田思域”,但是设备可以确定相同或相似的标识符似乎对应于两个不同的设备。这可能是因为不同的设备正报告相同的标识符,但是该不同的设备将无法看到相同的设备。例如,如果具有标识符的设备与具有相同标识符的第二设备相距几英里,则模糊性可以被校正和/或注意到,并且设备可以被注释或者标识符可以被改变以说明模糊性。例如,可以通过提供位置标识符或识别设备标识符(诸如在不同街道之间、不同出口之间、特定数量的英尺或英里内等)来解决模糊性。在模糊的“本田思域”的上述示例中,设备可以将相隔几英里的两个“本田思域”分开,第一个“本田思域”可以被给予在识别设备a的一英里之内的识别设备标识符和位置标识符,并且第二个“本田思域”可以具有在或超过两英里的位置标识符。还可以提供附加信息,例如它是轿车或者它不是半挂车,附加信息可以是设备可以被肯定地识别为什么或者与什么相关联,但是信息也可以包括设备不是什么。例如,它可以将车辆识别为本田思域,但它可能无法识别年份或年份范围,但它可能能够识别车辆的特定特征,以识别它不能与哪些年份相关联,诸如所使用的轮毂盖仅与2000年后的年份相关联,因此它不能是2000年前的车辆。
92.在一个实施例中,本设备可能无法区分相距很远的两个相似车辆,因此它可能不得不依赖牌照信息,这可能会引起隐私问题,因此它可以通过查看第一个字符、牌照号码的第一部分、最后一个字符、牌照号码的最后一部分、司法管辖区、车牌的设计、注册年份等来减轻隐私问题。
93.此外,移动设备100和/或服务器140可以基于多个公共设备和路线图来识别模糊的公共设备标识符。例如,如果两个设备具有相同的标识符,则可以基于路线图来识别模糊性(例如,第一标识符与另一标识符相比位于不同的街道或十字路口)。
94.路线图也可以用来绑定标识符。例如,它可以将标识符限制为街道、十字路口、范围等。这对于限制在存在一辆或多辆类似车辆时可能被认为模糊的标识符是有用的。
95.在一个实施例中,现实世界地图可以提供接近报告设备的非车辆信息。非车辆信息可以包括道路状况、潜在事故、车道或街道拥堵或其任意组合。当通过将非车辆信息结合到现实世界地图中来生成时,这可以由报告设备地图和现实世界地图的每个设备来生成。
96.该非车辆信息可以利用与设备和/或设备的车载传感器并置的传感器来生成。例如,速度信息(例如来自车辆的车轮滴答声、用于车辆报告速度信息的车载计算机、来自
gnss和/或无线地面通信的多普勒信息、运动传感器等)可用于确定街道拥堵。该信息可以与先前的速度、街道的速度限制、街道的历史速度等进行比较。该信息可以从图像传感器和/或gnss接收器得到增强,以确定车道拥堵。
97.根据本公开的一方面,现实世界地图可以提供设备信息,诸如紧急车辆、车辆的优先级信息或其任意组合。
98.作为示例,图3示出了在同一方向行驶的三车道道路中的设备a、b、c、d、e、f、g、h的地图300。设备a正在识别和/或确定哪些设备与它接近,并确定包含设备c、d、e、f和g的第一组设备地图信息330。设备b正在识别和/或确定哪些设备与它接近,并确定包含设备c、d、e和h的第二组设备地图信息340。设备b可能不知道设备g和f,因为它们在范围阈值之外(无论是人工限制和/或基于传感器等的物理限制),或者可能是因为它们不在设备b的视线范围内。类似地,设备a可能不知道设备h,因为它在范围阈值之外,或者可能是因为设备h不在设备a的视线范围内。移动设备100(例如,设备a、设备b或另一设备)和/或服务器140可以确定第一组设备地图信息330和第二组设备地图信息340是否包含一个或多个公共设备。在这种情况下,由于设备e、c和d可以被识别为两组设备地图信息之间的公共设备。移动设备100和/或服务器140还可以基于设备a和b的粗略位置来识别公共设备,以确认那些公共设备可能是相同设备。
99.在框240处,响应于第一组设备地图信息和第二组设备地图信息包含至少一个公共设备的确定,移动设备100和/或服务器140基于第一组设备地图信息和第二组设备地图信息生成设备的rtm。
100.例如,设备(例如,移动设备100)可以通过使用公共设备组合两组或更多组设备地图信息,来生成rtm。这可能涉及利用公共设备作为锚以将两组或更多组设备地图信息连接在一起(例如,经由gnss等)或作为绝对坐标。它还可以使用方位信息、行进方向、范围阈值、视线或其任意组合。
101.作为示例,图4示出了设备的地图400,其中设备a向南移动,设备b向北移动,设备c向西移动,设备d向东移动。东西走向的街道是两条单行道,一条向西,另一条向东。南北走向的街道包括两条道路,每条道路都有两条车道,一条道路的方向为从北向南,另一条道路的方向为从南向北。移动设备100和/或服务器140可以生成类似于设备的地图400的rtm。在另一示例中,移动设备100和/或服务器140可以生成四个rtm,其中第一rtm限于地图410的对应于北方部分的第一部分、地图420的对应于南方部分的第二部分、地图430的对应于西方部分的第三部分以及地图440的对应于东方部分的第四部分。在一个实施例中,可能存在对应于行进方向的多个rtm,因此包括设备a的道路(包括两个车道)可能都是单个rtm的一部分;而第二个rtm可以是包括设备b的道路。根据本公开的一方面,可以是多个rtm,其中rtm可以被限制到范围阈值(例如,一百米、一英里等)。
102.在一个实施例中,设备地图信息可以包括交通灯460。它可以包括来自交通灯460和/或正在穿过人行横道450的行人设备或行人的信息。交通灯460也可以是rsu。交通灯460可以协调车辆交通、行人交通和/或两者之间的交互。未与交通灯460并置的rsu可以控制交通灯460以及交通灯460如何协调车辆交通、行人交通和/或两者之间的交互。交通灯460可以确定行人何时可以走过人行横道450,诸如车辆b的车辆何时可以前进通过人行横道450,车辆何时应该等待而不前进通过人行横道450或者它们的任意组合。虽然图中未包括,但是
设备地图信息也可以包括标志作为非设备。车辆b可以在设备地图信息中指示rsu正在协调交通,并且它将指定车辆何时被允许行驶。在缺乏非托管(unmanaged)通信能力(诸如与rsu的通信)的车辆的示例中,该信息可以用于警告车辆驾驶员他们可能必须控制车辆,因为交通灯和/或rsu将指示何时能够继续行进。
103.在一个实施例中,设备(例如,移动设备100)可以基于行进方向、接近度、视线或其任意组合来过滤与设备相关的一组或多组设备地图信息。例如,设备可以移除在与移动设备100(或不同的目标设备)不同的方向或rtm的方向上行进的设备(例如,可能有在一个方向上行进的一个rtm,以及在不同的方向上行进的第二个rtm)。在一个实施例中,移动设备100和/或服务器140可以生成多个rtm,其中每个rtm对应于行进方向、接近度阈值、街道、交叉街道或其任意组合。
104.图5示出了rtm 500的示例。本设备(设备a)510可以识别设备b 520、设备c 540和设备h。本设备510可以具有无线通信能力,以便能够将该信息共享给服务器140和/或其他设备。设备a 510和设备c 540可以是唯一能够共享信息以生成rtm 500的设备。
105.生成rtm 500的好处在于,它允许移动设备和/或服务器生成大多数(如果不是全部)附近设备和非设备(例如行人、骑自行车的人等)(以及已经“扫描”并且没有附近设备和/或非设备的区域)并且不仅仅是具有特定功能(即无线通信)的设备的整体rtm 500,因此它允许adas设备、非adas设备和没有无线功能的adas设备的地图。例如,如果设备a 510和设备c 540是adas设备,但其余不是,则设备a 510可能正在高速移动,设备b可能快速移动到另一个车道,而设备e 530踩下其制动器。在传统的adas系统下,设备a 510直到设备b 520移开之后才意识到设备e 530,因此设备a 510具有设备e 530的无障碍视线,并且能够检测设备e 530并将其分类为车辆,这意味着当设备a 510可以使用额外的时间进行制动时,它将浪费宝贵的时间来检测车辆。然而,在rtm 500下,由于设备a 510已经知道设备e 530紧接在设备b 520的前面(因为来自设备c 540的设备地图信息),那么设备a 510可以基于设备c 540报告的设备e 530采取的动作而减慢速度,它可以能够对设备e 530执行的动作迅速采取动作(例如突然停止)或者使用关于设备e 530的设备分类器信息来估计到设备e 530的距离,即使没有设备的视图或部分视图。该系统允许更安全、更高效、更灵活的行进系统。
106.此外,rtm允许共享相关信息,诸如行人的轨迹等。这使得车辆能够更好地了解其周围环境,而不必重新发现已经由另一个设备确定的环境的一方面,因此这潜在地提高了每个设备和整个系统的处理效率。这也可以降低功耗、时延,提高传感器信息的可靠性和置信度,并改进功能(例如新用例、新功能等)。
107.图6a是以表格形式的设备地图信息600的示例。设备地图信息600示出报告设备(例如本设备)、设备标识符、相对于报告设备的角度、与报告设备的距离以及附近设备的行进方向。
108.在设备地图信息中可以提供附加信息、不同信息或较少信息(如整个说明书中所述)。例如,它可以包括报告设备的定位信息(例如,粗略位置、精确位置等)。该定位信息也可以与设备地图信息分开提供。
109.在该设备地图信息600的示例中,车辆a报告其前方五米(即北方位角零度)的具有标识符“本田领航员”的附近设备,但是车辆b也报告其后方五米(即一百八十度)的具有标
识符“本田领航员”的附近设备。如果这是唯一的公共设备,则该设备可以确定车辆b在车辆a的前方,并且在它们之间有一辆“本田领航员”车辆。然而,在该示例中,由于车辆a和车辆b报告了“丰田普锐斯”,并且车辆b报告了“福特野马”,该“福特野马”可能与车辆a报告的“黑色福特野马”是同一辆车,这两个设备将导致与两个车辆报告的“本田领航员”不一致,因此该设备可以确定与“本田领航员”存在模糊性,并且替代地将“丰田普锐斯”和“福特野马”用作公共设备加入设备地图信息。在一些实施例中,在识别出这种模糊性之后,设备可以通知报告设备获得更精确的设备标识符以将其与具有相同标识符的其他设备消除模糊性。
110.在一些实施例中,设备标识符可以具有特有的设备特性,诸如安装在车顶上的机架,但设备不必识别物体。它可以仅提供关键特征、尺寸、相对于车辆的定位或其任意组合。例如,如果它是安装在车顶上的机架,它可以提供近似的宽度和高度值(关键特征),并且它位于所识别车辆的顶部(例如,位于“2013本田雅阁”的顶部)。
111.根据本公开的一方面,主体设备可能被遮挡,这不允许本设备识别该设备。在这些情况下,本设备仍然可以报告主体设备的近似定位信息,但是设备标识符可以被列为未知、空或随机值,直到可以执行识别。
112.由于各种原因,主体设备也可能无法被识别,诸如它不对应于与车辆相关联的品牌和型号信息。这种情况发生在改装车辆或定制车辆上。在这种情况下,每个本车辆可以捕获定制/改装车辆的各种视角(其可以在不同的时间被捕获),并且来自不同视角的这些不同图像可以被本车辆、rsu和/或服务器用来确定定制/改装车辆的形状要素和/或尺寸。
113.设备地图信息可以被提供给移动设备100和/或服务器140。在以移动为中心的方法中,设备地图信息600可以被提供给移动设备100(经由点对点通信和/或广播通信)。移动设备100可以识别附近设备,并从其他报告设备获得设备地图信息。在一个实施例中,每个报告设备可以从其他报告设备获得设备地图信息,因此它可以生成它自己的rtm。根据本公开的一方面,每个报告设备可以向特定移动设备提供设备地图信息,该特定移动设备使用该信息来生成rtm并将其分发给每个报告设备。
114.在以服务器为中心的方法中,可以从每个报告设备向服务器140提供设备地图信息600。服务器可以远离报告设备的位置,或者可以接近报告设备(例如交通灯、rsu等)。服务器140可以基于所获得的设备地图信息来生成rtm。在一个实施例中,服务器140可以向报告设备和/或其他设备提供rtm。
115.根据本公开的一方面,设备可以向服务器140请求信息,并且服务器140可以基于rtm生成响应。例如,设备可以从服务器140请求到目的地的动态行进路线,因此服务器140可以基于实时或接近实时的实时rtm来更新行进路线。
116.还可以有一种混合方法,其向移动设备100和服务器140提供设备地图信息,和/或分割信息,并将部分信息发送给移动设备100,将另一部分信息发送给服务器140。在一个示例中,报告设备可以向包括特定移动设备100的附近设备广播设备地图信息。移动设备100可以基于设备地图信息生成rtm,并且移动设备100可以(经由点对点或广播)向服务器140发送本地rtm。服务器140可以使用来自不同位置的本地rtm来生成更大的rtm,该更大的rtm由于各种原因可能是有帮助的,诸如路线规划、紧急车辆路线等。
117.在一个实施例中,报告设备可以识别在相反方向或不同于报告设备的方向上行驶的车辆。例如,车辆b可以识别在南行道路上的车辆j和车辆c。
118.图6b是示出一个或多个rtm的设备的示例地图650。在地图650上有两个行进方向,北行方向交通670示出了三车道道路,并且南行方向交通660示出了不同的三车道道路。该地图650是基于来自图6a的设备地图信息600生成的。车辆a为报告设备,并且车辆h对应“本田领航员”,车辆f对应“黑色福特野马”,车辆e对应“红色福特野马”,并且车辆g对应“丰田普锐斯”。车辆b为报告设备,并且车辆g对应“丰田普锐斯”,车辆f对应“福特野马”,并且车辆i对应“本田领航员”。在南行方向道路上,车辆c为报告设备,车辆j对应“本田领航员”,并且车辆k对应“福特野马”。最后,车辆d为报告设备,并识别车辆j和车辆k。
119.此外,区域680被示出为指示车辆b的“盲点”区域,这意味着一个或多个传感器不能够或不能识别这些区域中的设备,因为它可能仅具有前置相机和后置相机,所以它能够看到车辆g、f和i(车辆e由于车辆g而被遮挡)。现实世界交通地图可以使用该信息来指示这些区域没有被监控。如果区域680附近的车辆获得了rtm,则它们可以进行附加的处理来监控这些区域,以确保该区域中没有设备或非设备。区域680可以基于rtm、设备地图信息、来自每个设备的能力信息、来自每个设备的可靠性信息或其任意组合来确定。
120.在一个实施例中,设备可以获得rtm 650,并基于现实世界交通地图650来调整其传感器或并置的传感器中的一个或多个。例如,车辆g可以优先考虑朝向车辆g侧面的感测设备,因为rtm 650已经指示车辆a在其前面并且车辆b在其后面。车辆g的侧面可以具有较高的准周期性感测速率,而其前方和后方可以具有较低的准周期性感测速率。由于车辆g可以知道没有被监控的区域680,因此车辆g可以为区域680设置最高的准周期性感测速率。感测速率可以基于每个传感器而变化,或者可以使用相同的速率。另外,一组或多组传感器可以被触发以同时感测,或者可以是异步的。在一些实施例中,设备可以准周期性地禁用其传感器(或并置的传感器)。
121.图7是示出生成、更新和/或查询rtm的方法的示例调用流程图。
122.调用流程700示出了车辆a生成设备地图信息710并将设备地图信息730提供给rsu和/或服务器的示例。这对于车辆b类似地完成,车辆b从其视角720生成设备地图信息,并将该设备地图信息740提供给rsu和/或服务器。在一个实施例中,车辆a和/或车辆b可能已经能够代替rsu和/或服务器或者与rsu和/或服务器相结合地将该信息发送到另一车辆。在一个实施例中,该通信可以是车辆和另一实体之间的点对点通信(例如,直接或通过一个或多个中介和rsu/服务器之间的点对点通信)或广播通信。
123.在广播通信设置中,每个车辆可以广播其设备地图信息,并且接收车辆或rsu可以使用来自多个车辆的广播信息来生成rtm 750。
124.在点对点通信设置中,每个车辆可以建立与rsu和/或服务器(或者车辆,如果该配置被启用的话)的通信信道,并且它可以提供设备地图信息。这可以由多个车辆来完成,并且rsu和/或服务器可以基于来自至少两个不同设备的多个设备地图信息来生成rtm 750。
125.在一个实施例中,当生成rtm的设备具有来自至少两个不同设备的设备地图信息时,该设备可以开始生成rtm。该设备可以基于何时在多个设备地图信息中识别出公共设备来生成rtm。
126.在一个实施例中,非报告设备可以接收由另一设备生成的设备地图信息,并且在这种情况下,非报告设备可以将该信息用于其自己的目的。例如,它可以在设备地图信息中识别自身,并基于该信息确定潜在危险或可以执行的机动。例如,非报告设备可能正试图改
变车道,但是设备地图信息可以指示在非报告设备正试图改变车道的车道上有车辆正在加速,因此可以发出警报以避免潜在的事故或向驾驶员提供警告。
127.在生成rtm 750之后,rsu和/或服务器可以向该区域中的设备提供rtm。这可以以未经请求的方式提供,意味着设备可能不需要请求rtm。在一个实施例中,rsu和/或服务器可以向报告了设备地图信息的设备提供rtm。
128.rsu和/或服务器可以向请求该信息(例如,查询760)的设备提供rtm(例如,查询响应770)。这是所请求的rtm请求的示例。
129.rtm可以经由推送或拉取响应被提供给设备。在推送响应中,当rtm变得可用时,它被从rsu/服务器(或附近车辆)推送到设备/车辆,而不需要设备在每次需要时做出特定的请求(取而代之的是,它可以是初始设置交换以启动推送响应)。在拉取响应中,当设备请求该信息时(例如,每次设备请求该信息时,设备都发出该请求),可以从rsu/服务器中拉取rtm。
130.在一个实施例中,设备可以向另一个设备查询信息,该信息可以从rtm导出,而请求设备不需要接收rtm。例如,在图6b中,车辆a可以向rsu/服务器查询rtm,以确定交通是否向前移动,因为其视线被车辆h遮挡,并且其可以发现在几英里内前方车辆以明显较慢的速度行驶。如果是驾驶员辅助系统,则该信息可以被提供给车辆a的驾驶员,或者如果车辆处于自动驾驶模式,则该信息可以被提供给自动驾驶控制器,从而在任一情况下都可以基于该信息采取动作(例如减速)。
131.该设备还可以查询关于其自身或与该设备并置的运输车辆的信息。例如,运输车辆可以识别出其燃油效率已经下降,或者其一个传感器指示车辆在移动时出现异常阻力,因此它可以查询rtm以提供关于其车身的信息。该信息可以在rtm中容易地获得,或者它可能需要向附近的多个车辆发送附加查询,并且能够报告该信息以执行该附加搜索。
132.例如,参考图6b,如果是车辆a,但是附近的所有车辆不具备直接向车辆a提供该信息的能力,但是它们能够将该信息发送到服务器,则车辆a可以查询服务器上的rtm以获得该信息。在这种情况下,服务器可以向附近车辆(车辆g、f、h和e)中的每一个发送请求,以获得车辆a的多个图像,并且车辆使用一种方法来识别图像与对车辆a的期望中的潜在差异,并将其提供给服务器,或者车辆可以向服务器提供图像数据,并且服务器可以做出该确定。可以将图像数据与图像特征、先前的图像数据、车辆a的二维或三维模型(可以由车辆a或oem提供和/或维护)或其任意组合进行比较。该比较可用于识别任何差异,并可报告给车辆a。这可用于任意数量的目的或用例,诸如“制动灯是否工作”、“卡车车厢内的货物是否得到适当保护?”等等。
133.在一个实施例中,第三方可以提供一个或多个关键特征或关键特征数据库,其可以用于在这些用例中的一些中提供响应,诸如“卡车车厢中的货物是否被适当地保护”。这些关键特征可以由与卡车相关的公司提供,以确保其员工正确遵守协议和程序,也可以由一个或多个服务机构(例如成像服务机构)、一个或多个第三方(例如高速公路管理局、oem等)或其任意组合提供。
134.在一个实施例中,附近设备可以报告关于设备的信息和/或报告该设备。例如,如果有一辆公司车辆,该公司车辆中车床上的货物正在移动,并且看起来不安全,则该信息可以由附近设备生成并报告给服务器。服务器可以将该信息提供给公司、第三方和/或报告机
构(例如警察、高速公路管理机构等)。该信息可以包括位置、车辆标识信息和/或图像或视频数据。
135.在一个实施例中,道路可以具有在相同方向上行进的五条车道,设备可以获得与道路相关联的rtm的一部分。该设备可以查询rsu/服务器760,请求与特定车道相关联的rtm的一部分。在一个实施例中,rsu/服务器760可以接收设备对rtm的请求,并且基于与设备相关联的车道,rsu/服务器可以提供与设备相关联的道路和/或车道相关联的rtm的一部分。例如,它可以只获得它正在其上行驶的车道和与设备相邻的车道的rtm,因此它可以获得三个车道的rtm,而不是所有五个车道的rtm。当然,rtm的一部分也可以是距离边界或类似边界(例如十字路口等)。
136.在一个实施例中,设备可以基于行进路线请求rtm的一部分。例如,如果设备已经确定或接收到去往目的地的行进路线,则设备可以请求与行进路线相关联的rtm。与行进路线相关联的rtm可用于调整行进路线。
137.设备沿行进路线的定位可用于确定要提供给设备的rtm的一部分。例如,rtm的一部分可以排除设备已经穿过的行进路线。
138.rtm的一部分也可以基于设备预期穿过的距离、一个或多个时间阈值或其任意组合来限制。例如,生成rtm的服务器和/或设备可以向请求设备提供被限制在请求设备周围一英里内的rtm的一部分。重要的是要注意,rtm的一部分可以被限制在请求设备前面的第一阈值和请求设备后面的不同阈值。它可以类似地在请求设备的左侧或右侧包括不同的阈值。
139.在一个实施例中,请求设备可以准周期性地请求和/或被提供接近请求设备的rtm(或rtm的更新)。在一个实施例中,请求设备可以基于接近请求设备的rtm的变化来请求和/或被提供接近请求设备的rtm(或rtm的更新)。请求设备可以基于请求设备与十字路口、高速公路入口/出口、合并车道或其任意组合的接近度,来请求和/或被提供接近请求设备的rtm(或rtm的更新)。
140.请求设备可以基于时间(例如,绝对时间、相对时间、与时间阈值的比较)请求和/或被提供接近请求设备的rtm(或rtm的更新)。绝对时间可以是utc时间、太平洋标准时间等。相对时间可以是自请求设备最后一次接收或被提供rtm以来的时间,或者可以是计数器。
141.在一个实施例中,请求设备可以基于请求设备的运动来请求和/或被提供rtm或rtm的更新。
142.在一个实施例中,请求设备可以基于上面所列技术的任意组合来请求和/或被提供rtm或rtm的更新。例如,请求设备可以基于时间及其与十字路口的接近度来请求rtm的更新。
143.图8是识别一个或多个车辆的示例过程图800。在框810处,接收来自一个或多个相机的图像传感器数据。图像传感器数据可以包含附近车辆、行人、标志等的图像。
144.在框820处,接收到的图像传感器数据可用于检测在接收到的图像传感器数据中是否有任何车辆。如果检测到任何车辆,则将每个检测到的车辆提供给框830。这些车辆可以以类似于当前所做的方式被检测,其中通用车辆检测器用于在图像传感器数据中检测车辆。通用车辆检测器通常是经由深度学习训练和旧图像数据开发的推理,用于检测具有新
图像数据的车辆。
145.在框830处,对于每个检测到的车辆,检测其每个特征。这可以允许特定车辆特有的特征在以后被检测并用于识别目的。
146.在框840处,将来自框830的针对特定车辆的检测到的特征与车辆特征数据库进行比较,以确定该特定检测到的车辆是否已经与所有检测到的特征相关联。如果任何特征还没有与检测到的车辆相关联,则它进行到框850。如果所有特征已经与该检测到的车辆相关联,则它进行到框860。对每个检测到的车辆进行该过程。如稍后将讨论的,还对与检测到的车辆不相关联的检测到的车辆关键特征执行该特征检测。一旦车辆被识别,本设备可以将2d或3d边界框附加到被识别的车辆。3d边界框可以基于所识别的车辆的检测到的特征来固定,并且可以基于所识别的车辆参数(例如,基于品牌、型号或任何其他设备特性的高度、宽度、长度)。
147.这些特征可以包括附加的参数,诸如但不限于可靠性、唯一性、自上次看到以来的时间、特征是否被用于附加形状要素或其任意组合。
148.在框850处,检测到但先前没有与检测到的车辆相关联的特征,然后将这些特征与检测到的车辆相关联。这可以以任意数量的方式完成,包括但不限于将特征或指向特征的指针存储在数据库中,并指示相关联的检测到的车辆。
149.在框860处,特征用于识别车辆。这些特征也可以用于跟踪车辆,和/或用于确定相对于本设备的定位信息。
150.在车辆已经被识别之后,本设备可以使用相关联的关键特征来继续检测、识别和/或跟踪车辆,而不需要首先经由通用车辆检测器检测车辆。因此,即使车辆从本车辆视野中消失,但随后重新出现在视野中,本车辆也不必再次启动车辆检测过程,它可以使用与每个附近车辆相关联的一个或多个关键特征来检查附近车辆是否仍然存在。这实现了潜在的更快和更可靠的识别和检测过程,从而减少了潜在的冲突。
151.在一个实施例中,本车辆可以基于附近车辆的车道定位、车辆的形状要素、车辆的尺寸、本车辆的尺寸、本车辆的传感器定位或其任意组合来预测或估计对于附近先前检测到的车辆而言哪些关键特征可能是可见的。
152.例如,如果附近的车辆在本车辆右侧的车道上,并且它们在相同的方向上行驶,则本车辆可以为附近车辆选择与附近车辆的左面和背面相关联的关键特征,并且可以优先考虑朝向车辆顶部的关键特征。当接收到图像传感器数据时,可以首先搜索优先化的关键特征,然后可以搜索附近车辆的左面和背面的下部。关键特征搜索仅仅是一个示例,另一个非限制性示例可以是基于该附近车辆和/或在特定时间段内已经被识别和/或检测到的所有附近车辆(例如,行程会话,在rtm中看到的,等等)来训练深度学习模型,然后可以使用基于训练的深度学习模型的推理分类器来检测这些被识别的车辆。这可以与通用车辆检测器和/或任何其他推理分类器并行和/或顺序运行。
153.在框870处,本设备和/或服务器/rsu可以基于检测到的车辆和图像传感器数据来确定图像传感器数据中是否存在不是检测到的车辆的一部分的任何车辆关键特征。这些关键特征可能与被遮挡的车辆相关联,并且传统上不能经由通用车辆检测器检测到。如果没有不在检测到的车辆之外的车辆特征,则它不继续,并且当新的图像传感器数据出现时,该过程再次开始。如果在检测到的车辆之外检测到车辆特征,则进行到框880。
154.在框880处,本设备和/或服务器/rsu可以确定是否可以基于在框870中检测到的车辆特征来识别车辆。如果可以基于关键特征来识别车辆,则进行到框840。关键特征可以已经与先前由本设备检测和识别的车辆相关联,和/或曾经/现在是rtm的一部分。如果不能基于关键特征来识别车辆,则进行到框890。
155.在框840处,如果可以基于关键特征来识别车辆,则执行检查以确定车辆是否已经与所有关键特征相关联。例如,它可能已经基于大部分关键特征(识别关键特征)被识别,但是如果存在与这些识别关键特征非常接近的非识别关键特征(和/或满足一个或多个阈值标准),则非识别关键特征应该与车辆相关联,并且它可以类似于最初检测到车辆时进行到框850(并且随后进行到框860)。
156.如果在框880不能基于关键特征来识别车辆,则进行到框890。如果关键特征非常接近(和/或满足一个或多个阈值标准),则关键特征与“未知”标识符相关联,因此仍然可以跟踪该车辆,直到可以识别为止。“未知”标识符可以是随机数、随机标识符、术语“未知”或空值,带有数字以指示被检测/跟踪的未知车辆的数量等。
157.在一个实施例中,如果关键特征彼此不是非常接近或者存在不同的关键特征簇,则可以相应地分离关键特征,并且可以使用如上所述的类似方法。可以有可以用于确定关键特征是否应该关联和/或分组在一起的其他标准,诸如但不限于特征的数量、特征的唯一性、特征与检测到的车辆的接近度、在时间段内(或在帧数阈值内)已经看到特征的次数等。
158.图9是确定暂时被遮挡车辆的定位信息的示例过程图。
159.在框910处,设备识别一个或多个车辆。该设备从一个或多个图像传感器获得一个或多个图像,并基于关键特征、形状要素或来自rtm或从rtm导出的任何其他信息来识别一个或多个车辆。
160.在框920处,设备确定所识别的一个或多个车辆是否被部分遮挡。这可以基于关键特征在车辆上的位置来确定。例如,如果仅在车辆顶部或右上角看到关键特征,则车辆正以某种方式被遮挡。
161.在一个实施例中,该设备可以确定关键特征是否先前在车辆上被看过到但不再被看到。例如,在先前,该设备或另一设备能够看到车辆背面周围的关键特征,但是当前仅看到车辆背面顶部的关键特征。
162.在一个实施例中,该设备可以识别第一车辆并检测不与第一车辆相关联但看起来与第一车辆在同一车道或轨迹中的关键特征。该设备然后可以从rtm确定关键特征是否与另一车辆相关联。如果关键特征与另一车辆相关联,则设备可以相应地跟踪车辆。如果基于rtm关键特征可以与两个或更多车辆相关联,则它可以跟踪车辆,但是在检测到并使用更多关键特征之前,它可能无法唯一地识别车辆。在一个实施例中,设备确定关键特征的数量必须满足或超过要识别的车辆的阈值。类似地,该设备可以基于关键特征来确定特有的分数,该分数指示基于检测到的关键特征、根据该区域的rtm,车辆有多特有,并且如果其满足或超过阈值,则可以识别该车辆。
163.在框930处,设备可以确定所识别的被部分遮挡的车辆的定位信息。设备可以基于关键特征确定表示车辆的尺寸或车辆的三维模型可以如何与车辆相关联。例如,如果车辆的顶部被看到并且车辆在rtm中被唯一地识别,那么来自车辆顶部的关键特征可以被用于将高度和宽度尺寸(高度和宽度尺寸从诸如但不限于数据库中检索)与识别的车辆相关联。
该信息可用于确定车辆的估计方位和/或从设备到识别的车辆的估计距离。
164.可用于识别车辆(诸如被部分遮挡的车辆)的关键特征可作为rtm的一部分获得。如果本设备先前已经在当前行程会话期间识别了车辆,则可以基于司法管辖区来使用它。在某些司法管辖区,诸如中国,他们可以允许车辆在多次行程中或只要车辆有存储空间就保存这些信息。在诸如美利坚合众国之类的其他司法管辖区中,可能存在隐私问题,因此车辆可以在旅行会话开始和/或结束时、在预定时间量之后、基于存储可用性(例如,有限的存储缓冲区,诸如仅可以跟踪10辆车辆)或其任意组合来清除识别信息。
165.图10a、10b和10c是车辆的示例地图,示出了暂时遮挡以及如何为该车辆确定定位信息。
166.图10a示出了车辆a 1001a使用rtm并识别附近车辆以确定相对于这些车辆的定位信息。对右侧车道中车辆来说,车辆b 1002a是车辆a 1001a的潜在遮挡。在右侧车道上,车辆c 1003a快速接近车辆a 1001a和车辆b1002a。
167.图10b示出了车辆c 1003b暂时完全被车辆b 1002b遮挡在车辆a1001b的视线之外。在这种情况下,车辆a 1001b将不知道车辆c 1003b正在被完全遮挡,除非车辆a 1001b跟踪车辆c 1003b直到其被完全遮挡。在一个实施例中,使用rtm的设备可以跟踪车辆直到它们完全被遮挡,并且可以通过推理确定车辆正在被遮挡。该设备可以继续推理车辆被遮挡,直到阈值时间已经过去,而没有检测到与被遮挡的车辆相关联的任何关键特征。
168.在一个实施例中,该设备可以继续推理车辆被遮挡,直到已经经过潜在的出口点。例如,如果车辆在高速公路上,车辆a 1001b可以推理车辆c 1003b继续被遮挡,因为它们没有通过高速公路出口,但是在通过高速公路出口之后,它可能需要看到与车辆c 1003b相关联的关键特征,以继续确定车辆c1003b正在被遮挡。
169.图10c示出了车辆c 1003c仅被车辆b 1002c部分遮挡。在这种情况下,车辆a 1001c可以检测沿着车辆c 1003c的左面的关键特征,并且可以使用这些关键特征来将尺寸和/或形状要素固定到车辆c 1003c。在车辆c 1003c的尺寸和/或形状要素已经固定到车辆上之后,车辆a 1001c可以使用该信息来确定相对于车辆c 1003c的定位信息。
170.图10d是可以从本设备的角度捕获的图像传感器数据1020,并且示出了附近的车辆1030和1040,并且示出了被部分遮挡的半挂车1050。从该图中可以看出,车辆1030和1040已经被通用车辆检测器检测到,如边界框1035和1045所示;然而,没有边界框来指示半挂车,以指示它没有被通用车辆检测器检测到。在这种情况下,本设备危险地没有意识到附近的半挂车,因此本设备上的规划和运动处理器可能无意中规划变道或路线,这将导致本设备无意中撞上半挂车。重要的是要注意,边界框1035和1045可以是二维边界框或三维边界框,但在此仅作为2d边界框的示例示出。
171.相反,通过使用rtm,本设备可以基于先前由本设备和/或其他车辆与半挂车相关联的关键特征来检测半挂车。当前的rtm可以通知本设备的规划和运动处理器,即使通用车辆检测器没有检测到半挂车,在该特定空间中仍然有半挂车。另外,本设备可以使用关键特征继续检测半挂车,因此它可以识别和/或跟踪半挂车。
172.图11是用于注册暂时与车辆并置以使用rtm的设备的示例过程图。
173.在一个实施例中,使用rtm的设备可以是暂时与车辆(例如汽车、自行车等)并置的智能电话或任何移动设备。
174.在框1110处,设备确定其是否与车辆并置。该设备可以基于其是否经由无线通信接口和/或有线接口与车辆配对来确定其是否与车辆并置。在一个实施例中,设备可以基于从车辆接收的车载设备信息来确定其是否与车辆并置。它还可以基于速度和/或行进路线来确定它是否与车辆并置。在一个实施例中,该设备可以基于图像数据确定其与车辆并置,该图像数据可以识别车辆的特性,诸如方向盘、仪表板等。
175.在框1120处,设备可以获得对应于设备位置的rtm。如果车辆知道其位置,它可以将其提供给设备,并且设备也可以使用该信息来检索对应的rtm。
176.在框1130处,设备识别rtm中的并置车辆。该设备可以基于历史信息、用户输入或图像数据先验地与可识别车辆信息相关联。例如,用户可以拍摄车辆的照片,该照片可以用于识别品牌、型号等,并且可以基于该图像数据获得车辆信息。可识别车辆信息可以由车辆提供,诸如通过车载设备信息,或者可以经由附在车辆上的快速响应代码、射频标签等获得。
177.在设备获得可识别车辆信息之后,设备可以使用该信息来识别rtm内的车辆。如果车辆最近才开始行驶,或者周围很少或没有车辆或设备,那么它可能需要准周期性地搜索自身(包括rtm更新),直到车辆被识别。一旦车辆被识别,那么它就被认为是注册了的,并且该设备可以使用rtm来向驾驶员提供驾驶辅助信息。例如,它可以通知他们移动到另一条车道会更好,因为前方的车辆经常无故制动并且会导致不必要的减速。
178.在一个实施例中,设备可以使用其自己的传感器(诸如惯性运动传感器、图像传感器等),以代表并置的车辆提供设备地图信息,并使用rtm。
179.根据本公开的一方面,如果存在与同一车辆并置的多个设备,则每个设备可以确定其是否想要代表车辆提供信息。然而,可以基于其他设备、用户输入、指示与驾驶员接近度的图像数据或其任意组合来选择提供驾驶员辅助信息的设备。
180.通过使用暂时并置的设备来使用rtm提供驾驶员辅助信息,它允许驾驶员在操作他们的车辆时提高他们的安全性,而不需要购买新的车辆来启用该功能。这也意味着交通流量和到达目的地的时间也可以得到改善。
181.图12是在高级驾驶员辅助系统中利用rtm的示例流程图。
182.在框1210处,移动设备、rsu和/或服务器可以基于rtm识别接近本设备的一个或多个车辆。这些车辆可以基于安全性、自我维护成本、到达目的地的时间、交通、兴趣点、本车辆的路线或其任意组合来被识别。
183.例如,如果附近车辆频繁制动,并且该信息是rtm的一部分,则本车辆和/或rsu/服务器可以将该车辆识别为本车辆的车辆,以避免安全问题、避免增加本车辆的维护成本(例如,可以包括保险成本)、减少到达目的地的时间、引起人工交通等。本车辆可以使用该信息或将该信息提供给其行为/路线规划组件,以通过避开这些车辆来进一步优化本车辆的路线。
184.根据本公开的一方面,本车辆可以不对rtm做出贡献,而是仅使用rtm。在本车辆提供驾驶员辅助信息或有限的驾驶辅助但它不能自动驾驶的情况下(例如,可以在有限的情况下应用制动、加油或转向,类似于2级或3级车辆),用户可以输入信息,以供本车辆在rtm中识别自身,或者车辆可以在其车载设备中具有足够的可识别信息以在rtm中识别自身,并且然后继续识别rtm中的其他附近设备。
185.在一个实施例中,rtm可以包括安全信息或车辆意图信息。例如,第一车辆可以提供设备地图信息,但是也可以包括第一车辆打算在接下来的五百毫秒内并道。rsu或服务器可以生成现实世界的交通地图信息,并通知接近第一车辆的其他车辆第一车辆打算在接下来的500毫秒内并道。在一个实施例中,rsu可以识别可能受第一车辆车道合并影响的车辆,并且rsu可以专门向这些车辆提供消息或通知。
186.在另一示例中,本车辆的乘客可以请求更近地看到海洋,海洋在车辆的右侧,因此本车辆可以在rtm中识别车辆,从而本车辆可以导航到右侧车道。
187.在框1220处,移动设备、rsu和/或服务器可以基于所识别的一个或多个车辆来确定本车辆或与本车辆并置的设备的一个或多个动作。本车辆可以使用识别的车辆来确定本车辆何时能够并入另一个车道、调整速度、并入或离开高速公路/高速公路、调整方向等。在一个实施例中,设备和/或服务器可以确定如何提供这些动作,诸如视觉、触觉、听觉指示器或警报的任何组合。它还可以提供在何处提供这些指示,诸如头戴式显示器、混合现实显示器、虚拟现实显示器、信息娱乐显示器等;这些指示应该提供多长时间和/或多早提供。
188.例如,如果本车辆由用户操作,则设备和/或服务器可以识别用户,并且基于用户进行的以下操作:提供触觉反馈并且在需要采取动作之前四英里向其提供几分钟,并且在需要采取动作之前一英里提供后续视觉警报,直到采取动作或者不再能够采取动作,对于该特定用户是最佳的。这可以基于用户的历史模式、他们何时能够执行动作与何时不能执行动作、用户输入、oem输入等来确定。
189.这也可以基于该动作是否可执行。例如,如果动作是合并车道,但没有开放位置供车辆合并和/或其他附近车辆不允许车辆合并,则动作可能不可行,因此可以忽略。该信息还可以用于通知设备和/或服务器他们可能需要多早触发车辆到车辆的通信来发起动作(例如,请求其他附近车辆为本车辆开放位置以合并到他们的车道中)。
190.在框1230处,移动设备、rsu和/或服务器可以提供一个或多个动作或者执行一个或多个动作。例如,可以经由警报(例如,触觉、视觉、听觉等)向车辆的操作者提供一个或多个动作。如果车辆处于自动模式,车辆可以执行这些动作。
191.图13是根据实施方式的移动设备1300的示意图。图1所示的移动设备100可以包括图13所示的移动设备1300的一个或多个特征。在某些实现中,移动设备1300可以包括无线收发器1321,其能够通过无线通信网络经由无线天线1322发送和接收无线信号1323。无线收发器1321可以通过无线收发器总线接口1320连接到总线1301。在一些实现中,无线收发器总线接口1320可以至少部分地与无线收发器1321集成。一些实现可以包括多个无线收发器1321和无线天线1322,以使得能够根据相应的多个无线通信标准来发送和/或接收信号,诸如,ieee标准802.11、cdma、wcdma、lte、umts、gsm、amps、zigbee、蓝牙的版本以及由3gpp定义的5g或nr无线电接口,仅举几个示例。在特定实现中,如上所述,无线收发器1321可以在上行链路信道上发送信号,并在下行链路信道上接收信号。
192.移动设备1300还可以包括能够经由sps天线1358(在一些实现中,其可以与天线1322集成)接收和获取sps信号1359的sps接收器1355。sps接收器1355还可以全部或部分地处理获取的sps信号1359,用于估计移动设备1300的位置。在一些实现中,通用处理器1311、存储器1340、(多个)数字信号处理器((多个)dsp)1312和/或专用处理器(未示出)也可以用于处理全部或部分获取的sps信号,和/或结合sps接收器1355计算移动设备1300的估计位
置。可以在存储器1340或寄存器(未示出)中执行sps或其他信号(例如,从无线收发器1321获取的信号)的存储或这些信号的测量的存储,以用于执行定位操作。(多个)通用处理器1311、存储器1340、(多个)dsp 1312和/或专用处理器可以提供或支持位置引擎,用于处理测量以估计移动设备1300的位置。在特定实现中,为过程1100阐述的所有或部分动作或操作可以由(多个)通用处理器1311或(多个)dsp 1312基于存储在存储器1340中的机器可读指令来执行。
193.如图13中所示,(多个)数字信号处理器((多个)dsp)1312和(多个)通用处理器1311可以通过总线1301连接到存储器1340。特定的总线接口(未示出)可以与(多个)dsp 1312、(多个)通用处理器1311和存储器1340集成。在各种实现中,可以响应于存储在存储器1340中(诸如在计算机可读存储介质(诸如ram、rom、flash或磁盘驱动器)上,仅举几个示例)的一个或多个机器可读指令的执行来执行功能。一个或多个指令可以由(多个)通用处理器1311、专用处理器、(多个)图形处理单元(gpu)、神经处理器(npu)、(多个)ai加速器或(多个)dsp 1312执行。存储器1340可以包括存储可由(多个)处理器1311和/或(多个)dsp 1312执行的软件代码(编程代码、指令等)的非暂时性处理器可读存储器和/或计算机可读存储器。(多个)处理器1311和/或(多个)dsp 1312可用于执行贯穿说明书所述的各种操作。
194.如图13中所示,用户界面1335可以包括几种设备中的任何一种,诸如扬声器、麦克风、显示设备、振动设备、键盘、触摸屏,仅举几个示例。在特定实现中,用户接口1335可以使用户能够与移动设备1300上托管(host)的一个或多个应用交互。例如,用户接口1335的设备可以将模拟或数字信号存储在存储器1340上,以响应于用户的动作由(多个)dsp 1312或通用处理器1311进一步处理。类似地,托管在移动设备1300上的应用可以将模拟或数字信号存储在存储器1340上,以向用户呈现输出信号。在另一实现中,移动设备1300可以可选地包括专用音频输入/输出(i/o)设备1370,该设备包括例如专用扬声器、麦克风、数模电路、模数电路、放大器和/或增益控制。音频i/o 1370还可以包括超声波或任何基于音频的定位,其可以用于确定移动设备1300的定位、方位或环境。音频i/o 1370也可以用于经由一个或多个音频信号向另一个源提供数据。然而,应当理解,这仅仅是如何在移动设备中实现音频i/o的示例,并且所要求保护的主题不限于此。
195.移动设备1300还可以包括用于捕获静止或运动图像的专用相机设备1364。相机设备1364可以包括例如成像传感器(例如,电荷耦合器件或cmos成像器)、透镜、模数电路、帧缓冲器,仅举几个示例。在一个实施例中,可以在通用/应用处理器1311或(多个)dsp 1312处执行表示捕获图像的信号的附加处理、调节、编码或压缩。或者,专用视频处理器1368可以对表示捕获图像的信号进行调节、编码、压缩或操纵。此外,视频处理器1368可以解码/解压缩存储的图像数据,以呈现在移动设备1300上的显示设备(未示出)上。视频处理器1368可以是图像传感器处理器,并且能够执行计算机视觉操作。
196.相机设备1364可以包括车辆上的图像传感器。图像传感器可以包括相机、基于电荷耦合器件(ccd)的设备或基于互补金属氧化物半导体(cmos)的设备、激光雷达、计算机视觉设备等,其可用于获得车辆周围环境的图像。图像传感器可以是静态和/或视频相机,可以捕获环境的一系列二维(2d)静态和/或视频图像帧。在一些实施例中,图像传感器可以采取深度感测相机的形式,或者可以耦合到深度传感器。术语“深度传感器”用于指可用于获得深度信息的功能单元。在一些实施例中,图像传感器232可以包括红
‑
绿
‑
蓝深度(rgbd)相
机,除了彩色(rgb)图像之外,当深度传感器被启用时,其可以捕获像素深度(d)信息。在一个实施例中,深度信息可以从立体传感器获得,诸如红外结构光投影仪和注册在rgb相机的红外相机的组合。在一些实施例中,图像传感器可以是能够捕捉三维(3d)图像的立体相机。例如,深度传感器可以形成被动立体视觉传感器的一部分,该传感器可以使用两个或更多个相机来获得场景的深度信息。捕获场景中两个相机共有的点的像素坐标可以与相机参数信息、相机姿态信息和/或三角测量技术一起使用,以获得每个像素深度信息。在一些实施例中,图像传感器能够捕获红外线或其他不可见光(即人眼不可见)。在一些实施例中,图像传感器可以包括激光雷达传感器,其可以提供测量来估计物体的相对距离。相机1364还能够通过捕获光学测量并解调以接收该数据来接收视觉光通信数据。术语“相机姿态”或“图像传感器姿态”也用于指图像传感器在主体车辆上的定位和方位。
197.移动设备1300还可以包括耦合到总线1301的传感器1360,总线1301可以包括例如惯性传感器和环境传感器。传感器1360的惯性传感器可以包括例如加速度计(例如,共同响应移动设备1300在三维方向上的加速度)、一个或多个陀螺仪或一个或多个磁力计(例如,用于支持一个或多个罗盘应用)。移动设备1300的环境传感器可以包括例如温度传感器、气压传感器、环境光传感器、相机成像器、麦克风,仅举几个示例。传感器1360可以生成模拟或数字信号,这些信号可以存储在存储器1340中,并由(多个)dsp 1312或通用应用处理器1311处理,以支持一个或多个应用,诸如针对定位或导航操作的应用。传感器1360还可以包括雷达1362,其可以用于确定设备和另一个物体之间的距离。传感器1360、sps接收器1355、无线收发器1321、(多个)相机1364、音频i/o 1370、雷达1362或其任意组合可用于确定移动设备1300的一个或多个位置测量和/或定位位置。
198.移动设备1300可以包括一个或多个显示器1375和/或一个或多个显示控制器(未示出)。显示器1375和/或显示控制器可以提供和/或显示用户接口、视觉警报、度量和/或其他可视化。在一个实施例中,一个或多个显示器1375和/或显示控制器可以与移动设备1300集成。
199.根据本公开的另一方面,一个或多个显示器1375和/或显示控制器可以在移动设备1300的外部。移动设备1300可以通过有线或无线接口具有一个或多个输入和/或输出端口(i/o)1380,并且可以使用i/o向外部的一个或多个显示器1375和/或(多个)显示控制器提供数据。
200.i/o 1380也可以用于其他目的,诸如但不限于从车辆的车载诊断、车辆传感器获得数据,从移动设备1300向外部设备提供传感器信息等。i/o 1380可用于向另一处理器和/或组件(诸如行为和/或路线规划组件1390)提供数据(诸如定位信息)。
201.移动设备1300可以包括有线接口(图13中未示出),诸如以太网、同轴电缆、控制器局域网(can)等。
202.行为和/或路线规划组件1390可以是一个或多个硬件组件、软件或其任意组合。行为和/或路线规划组件1390也可以是一个或多个其他组件的一部分,诸如但不限于一个或多个通用/应用处理器1311、dsp 1312、gpu、(多个)神经处理器(npu)、(多个)ai加速器、微控制器、控制器、(多个)视频处理器1368或其任意组合。行为和/或路线规划组件1390可以确定和/或调整车辆速度、定位、方位、机动、路线等。行为和/或路线规划组件1390可以基于与速度、定位、方位、机动、路线等相关的确定,向车辆的用户或操作员和/或远程方(例如,
第三方、远程操作员、车辆所有者等)触发警报。在一个实施例中,行为和/或路线规划组件1390还可以执行类似于图2、图7、图8、图9、图11、图12和/或说明书的其他部分中列出的一个或多个步骤。
203.行为和/或路线规划组件1390、处理器1311、gpu、dsp 1312、(多个)视频处理器1368或其他类型的(多个)处理器、存储器1340、传感器1360、(多个)雷达1362、(多个)相机1364、具有调制解调器处理器1366的无线收发器1321、音频i/o 1370、sps接收器1355或其任意组合可以获得与一个或多个设备相关联的第一组设备地图信息,其中一个或多个设备接近第一设备,类似于框210和步骤710、720、730和740;和/或获得与接近第二设备的一个或多个设备相关联的第二组设备地图信息,类似于框220和步骤710、720、730和740。行为和/或路线规划组件1390、处理器1311、gpu、dsp 1312、(多个)视频处理器1368或其他类型的(多个)处理器、存储器1340或其任意组合可以确定第一组设备地图信息和第二组设备地图信息是否包含至少一个公共设备,类似于框230;和/或响应于确定第一组设备地图信息和第二组设备地图信息包含至少一个公共设备,可以基于第一组设备地图信息和第二组设备地图信息生成设备的rtm,类似于框240和750。
204.行为和/或路线规划组件1390、处理器1311、gpu、dsp 1312、(多个)视频处理器1368或其他类型的(多个)处理器、存储器1340、(多个)相机1364、具有调制解调器处理器1366的无线收发器1321、音频i/o 1370、sps接收器1355或其任意组合可以查询rtm,类似于步骤760,和/或可以基于rtm提供对查询的响应,类似于步骤770。
205.行为和/或路线规划组件1390、处理器1311、gpu、dsp 1312、(多个)视频处理器1368或其他类型的(多个)处理器、存储器1340、无线收发器1321、有线接口或其任何组合可以接收图像传感器数据,类似于框810;检测车辆,类似于框820,检测车辆特征,类似于框830;确定是否所有的特征都已经关联,类似于框840;将先前未与车辆关联的任何特征与车辆相关联,类似于框850;识别车辆,类似于框860;确定是否在检测到的车辆之外发现了任何车辆关键特征,类似于框870;确定是否可以基于车辆关键特征来识别车辆,类似于880;以及将车辆关键特征与未知标识符相关联,类似于890。
206.行为和/或路线规划组件1390、处理器1311、gpu、dsp 1312、(多个)视频处理器1368或其他类型的(多个)处理器、存储器1340、传感器1360、(多个)雷达1362、(多个)相机1364、具有调制解调器处理器1366的无线收发器1321、音频i/o 1370、sps接收器1355或其任意组合可以识别一个或多个车辆,类似于框910;和/或可以确定所识别的被部分遮挡的车辆的定位信息,类似于框930。行为和/或路线规划组件1390、处理器1311、gpu、dsp 1312、(多个)视频处理器1368或其他类型的(多个)处理器、存储器1340或其任意组合可以确定所识别的一个或多个车辆是否被部分遮挡,类似于框920。
207.行为和/或路线规划组件1390、处理器1311、gpu、dsp 1312、(多个)视频处理器1368或其他类型的(多个)处理器、存储器1340、传感器1360、(多个)相机1364、具有调制解调器处理器1366的无线收发器1321、音频i/o 1370、sps接收器1355或其任意组合可以确定设备是否与车辆并置,类似于框1110;获得rtm,类似于框1120;和/或识别rtm中的车辆,类似于框1130。
208.行为和/或路线规划组件1390、处理器1311、gpu、dsp 1312、(多个)视频处理器1368或其他类型的(多个)处理器、存储器1340或其任意组合可以基于rtm识别接近本车辆
的一个或多个车辆,类似于框1210;基于所识别的一个或多个车辆,确定本车辆或与本车辆并置的设备的一个或多个动作,类似于框1220;和/或提供一个或多个动作或执行一个或多个动作,类似于框1230。
209.在特定实现中,移动设备1300可以包括专用调制解调器处理器1366,其能够对在无线收发器1321或sps接收器1355处接收和下变频的信号执行基带处理。类似地,调制解调器处理器1366可以对要上变频的信号执行基带处理,以便由无线收发器1321传输。在替代实现中,基带处理可以由通用处理器或dsp(例如,通用/应用处理器1311或(多个)dsp 1312)来执行,而不是具有专用调制解调器处理器。然而,应当理解,这些仅仅是可以执行基带处理的结构的示例,并且所要求保护的主题不限于此。
210.图14是根据实施方式的服务器1400的示意图。图1所示的服务器140可以包括图14所示的服务器1400的一个或多个特征。在某些实现中,服务器1400可以包括无线收发器1421,其能够通过无线通信网络经由无线天线1422发送和接收无线信号1423。无线收发器1421可以通过无线收发器总线接口1420连接到总线1401。在一些实现中,无线收发器总线接口1420可以至少部分地与无线收发器1421集成。一些实现可以包括多个无线收发器1421和无线天线1422,以使得能够根据相应的多个无线通信标准来发送和/或接收信号,诸如,ieee标准802.11、cdma、wcdma、lte、umts、gsm、amps、zigbee、蓝牙的版本以及由3gpp定义的5g或nr无线电接口,仅举几个示例。在特定实现中,如上所述,无线收发器1421可以在上行链路信道上发送信号,并在下行链路信道上接收信号。
211.服务器1400可以包括有线接口(图14中未示出),诸如以太网、同轴电缆等。
212.如图14中所示,(多个)数字信号处理器((多个)dsp)1412和(多个)通用处理器1411可以通过总线1401连接到存储器1440。特定的总线接口(未示出)可以与(多个)dsp 1412、(多个)通用处理器1411和存储器1440集成。在各种实现中,可以响应于存储在存储器1440中(诸如在计算机可读存储介质(诸如ram、rom、flash或磁盘驱动器)上,仅举几个示例)的一个或多个机器可读指令的执行来执行功能。一个或多个指令可以由(多个)通用处理器1411、专用处理器、或(多个)dsp 1412执行。存储器1440可以包括存储可由(多个)处理器1411和/或(多个)dsp 1412执行的软件代码(编程代码、指令等)的非暂时性处理器可读存储器和/或计算机可读存储器。(多个)处理器1411、(多个)专用处理器、(多个)图形处理单元(gpu)、(多个)神经处理器(npu)、(多个)ai加速器、(多个)微控制器、(多个)控制器和/或(多个)dsp 1412可用于执行说明书中描述的各种操作。
213.行为和/或路线规划组件1450可以是一个或多个硬件组件、软件或其任意组合。行为和/或路线规划组件1450也可以是一个或多个其他组件的一部分,诸如但不限于一个或多个通用/应用处理器1411、dsp 1412、gpu、(多个)神经处理器(npu)、(多个)ai加速器、微控制器、控制器、(多个)视频处理器或其任意组合。行为和/或路线规划组件1450可以确定和/或调整车辆速度、定位、方位、机动、路线等。行为和/或路线规划组件1450可以基于与速度、定位、方位、机动、路线等相关的确定,向车辆的用户或操作员和/或远程方(例如,第三方、远程操作员、车辆所有者等)触发警报。在一个实施例中,行为和/或路线规划组件1450还可以执行类似于图2、图7、图8、图9、图11、图12和/或说明书的其他部分中列出的一个或多个步骤。
214.交通管理控制器1460可以是一个或多个硬件组件、软件或其任意组合。行为和/或
路线规划组件1450也可以是一个或多个其他组件的一部分,诸如但不限于一个或多个通用/应用处理器1411、dsp 1412、gpu、(多个)神经处理器(npu)、(多个)ai加速器、微控制器、控制器、(多个)视频处理、行为/路径规划1450或其任意组合。交通管理控制器1460可以基于当前交通模式和/或预测的交通模式,使用rtm来为用户确定优化的路线。交通管理控制器1460可以被交通灯(例如,物理交通灯、虚拟交通灯等)或交通灯的操作员用来控制城市、自治市等中的交通流量。
215.行为和/或路线规划组件1450、处理器1411、gpu、dsp 1412、(多个)视频处理器或其他类型的(多个)处理器、存储器1440、无线收发器1421、有线接口或其任何组合可以获得与一个或多个设备相关联的第一组设备地图信息,其中一个或多个设备接近第一设备,类似于框210和步骤710、720、730和740;获得与接近第二设备的一个或多个设备相关联的第二组设备地图信息,类似于框220和步骤710、720、730和740;确定第一组设备地图信息和第二组设备地图信息中是否包含至少一个公共设备,类似于步骤230;和/或响应于确定第一组设备地图信息和第二组设备地图信息包含至少一个公共设备,可以基于第一组设备地图信息和第二组设备地图信息生成设备的rtm,类似于框240和750。
216.行为和/或路线规划组件1450、处理器1411、图形处理器、数字信号处理器1412、(多个)视频处理器或其他类型的(多个)处理器、存储器1440、无线收发器1421、有线接口或其任意组合可以查询rtm,类似于步骤760,和/或可以基于rtm提供对查询的响应,类似于步骤770。
217.行为和/或路线规划组件1450、处理器1411、gpu、dsp 1412、(多个)视频处理器或其他类型的(多个)处理器、存储器1440、无线收发器1421、有线接口或其任何组合可以接收图像传感器数据,类似于框810;检测车辆,类似于框820,检测车辆特征,类似于框830;确定是否所有的特征都已经关联,类似于框840;将先前未与车辆关联的任何特征与车辆相关联,类似于框850;识别车辆,类似于框860;确定是否在检测到的车辆之外发现了任何车辆关键特征,类似于框870;确定是否可以基于车辆关键特征来识别车辆,类似于880;以及将车辆关键特征与未知标识符相关联,类似于890。
218.行为和/或路线规划组件1450、处理器1411、gpu、dsp 1412、(多个)视频处理器或其他类型的(多个)处理器、存储器1440、无线收发器1421、有线接口或其任意组合可以识别一个或多个车辆,类似于框910;可以确定所识别的被部分遮挡的车辆的定位信息,类似于框930;和/或可以确定所识别的一个或多个车辆是否被部分遮挡,类似于框920。
219.行为和/或路线规划组件1450、交通管理控制器1460、处理器1411、gpu、dsp 1412、(多个)视频处理器或其他类型的(多个)处理器、存储器1440、无线收发器1421、有线接口或其任意组合可以确定设备是否与车辆并置,类似于框1110;获得rtm,类似于框1120;和/或识别rtm中的车辆,类似于框1130。
220.行为和/或路线规划组件1450、交通管理控制器1460、处理器1411、gpu、dsp 1412、(多个)视频处理器1368或其他类型的(多个)处理器、存储器1440、无线收发器1421、有线接口或其任意组合可以基于rtm识别接近本车辆的一个或多个车辆,类似于框1210;基于所识别的一个或多个车辆,确定本车辆或与本车辆并置的设备的一个或多个动作,类似于框1220;和/或提供一个或多个动作,类似于框1230。
221.本说明书中对组件间耦合的讨论不要求组件直接耦合。这些组件可以直接耦合或
通过一个或多个中介耦合。此外,耦合不需要它们直接连接,但是它也可以包括电耦合、光耦合、通信耦合或它们的任意组合。
222.在整个说明书中,对“一个示例”、“示例”、“某些示例”或“示例性实现”的引用意味着结合特征和/或示例描述的特定特征、结构或特性可以包括在所要求保护的主题的至少一个特征和/或示例中。因此,短语“在一个示例中”、“示例”、“在某些示例中”或“在某些实现中”或其他类似短语在本说明书各处的出现不一定都指相同的特征、示例和/或限制。此外,特定特征、结构或特性可以在一个或多个示例和/或特征中组合。
223.本文包括的详细描述的一些部分是根据对存储在特定装置或专用计算设备或平台的存储器中的二进制数字信号的操作的算法或符号表示来呈现的。在该特定说明书的上下文中,术语特定装置等包括被编程为根据来自程序软件的指令执行特定操作的通用计算机。算法描述或符号表示是信号处理或相关领域的普通技术人员用来向本领域的其他技术人员传达他们工作的实质的技术的示例。算法在这里通常被认为是带来期望结果的操作或类似信号处理的自洽序列。在这种情况下,操作或处理涉及物理量的物理操纵。典型地,尽管不是必须的,这些量可以采取能够被存储、传输、组合、比较或以其他方式操纵的电信号或磁信号的形式。已经证明,有时,主要是出于通用的原因,将这样的信号称为比特、数据、值、元素、符号、字符、术语、数字、数值等是方便的。然而,应该理解,所有这些或类似的术语都与适当的物理量相关联,并且仅仅是方便的标签。除非特别说明,否则从本文的讨论中清楚的是,在整个说明书中,使用诸如“处理”、“估算”、“计算”、“确定”等术语的讨论是指诸如专用计算机或类似的专用电子计算设备的特定装置的动作或过程。因此,在本说明书的上下文中,专用计算机或类似的专用电子计算设备能够操纵或转换信号,信号通常表示为专用计算机或类似的专用电子计算设备的存储器、寄存器或其他信息存储设备、传输设备或显示设备内的物理电子或磁量。
224.在另一方面,如前所述,无线发送器或接入点可以包括蜂窝收发器设备,用于将蜂窝电话服务扩展到企业或家庭。在这样的实现中,例如,一个或多个移动设备可以经由码分多址(“cdma”)蜂窝通信协议与蜂窝收发器设备通信。
225.本文描述的技术可与包括若干gnss中的任何一个和/或gnss的组合的sps一起使用。此外,这种技术可以与定位系统一起使用,该定位系统利用充当“伪卫星”的地面发送器,或者sv和这种地面发送器的组合。地面发送器可以例如包括广播pn码或其他测距码(例如,类似于gps或cdma蜂窝信号)的基于地面的发送器。这种发送器可以被分配一个唯一的pn码,以便允许远程接收器识别。地面发送器对如下可能是有用的,例如,在来自轨道sv的sps信号可能不可用的情况下,诸如在隧道、矿井、建筑物、城市峡谷或其他封闭区域,可以增强sps。伪卫星的另一种实现称为无线电信标。本文使用的术语“sv”旨在包括充当伪卫星的地面发送器、伪卫星的等价物以及可能的其他。本文使用的术语“sps信号”和/或“sv信号”旨在包括来自地面发送器(包括充当伪卫星或伪卫星等同物的地面发送器)的类似sps的信号。
226.在前面的详细描述中,阐述了许多具体细节,以提供对所要求保护的主题的透彻理解。然而,本领域技术人员将理解,可以在没有这些具体细节的情况下实践所要求保护的主题。在其他情况下,没有详细描述本领域普通技术人员已知的方法和装置,以免混淆所要求保护的主题。
227.本文使用的术语“和”、“或”和“和/或”可以包括多种含义,这些含义也至少部分取决于使用这些术语的上下文。通常,“或”如果用于关联一个列表,诸如a、b或c,意在表示a、b和c(这里用在包含的意义上),以及a、b或c(这里用在排除的意义上)。此外,本文中使用的术语“一个或多个”可以单数形式用于描述任何特征、结构或特性,或者可以用于描述特征、结构或特性的多个或一些其他组合。然而,应当注意,这仅仅是说明性示例,并且所要求保护的主题不限于该示例。
228.虽然已经说明和描述了目前被认为是示例特征的内容,但是本领域技术人员将理解,在不脱离要求保护的主题的情况下,可以进行各种其他修改,并且可以替换等同物。此外,在不脱离本文描述的中心概念的情况下,可以进行许多修改以使特定情况适应所要求保护的主题的教导。
229.因此,旨在所要求保护的主题不限于所公开的特定示例,而是这种所要求保护的主题还可以包括落入所附权利要求及其等同物范围内的所有方面。
230.对于涉及固件和/或软件的实施方式,方法可以用执行本文描述的功能的模块(例如,过程、功能等)来实现。任何有形地包含指令的机器可读介质都可以用于实现本文描述的方法。例如,软件代码可以存储在存储器中并由处理器单元执行。存储器可以在处理器单元内和/或处理器单元外部实现。如本文所使用的,术语“存储器”指的是任何类型的长期、短期、易失性、非易失性或其他存储器,并且不限于任何特定类型的存储器或存储器数量,或者存储存储器的介质类型。
231.如果在固件和/或软件中实现,则这些功能可以作为一个或多个指令或代码存储在计算机可读存储介质上。示例包括用数据结构编码的计算机可读介质和用计算机程序编码的计算机可读介质。计算机可读介质包含物理计算机存储介质。存储介质可以是计算机可以访问的任何可用介质。作为示例而非限制,这种计算机可读介质可以包括ram、rom、eeprom、cd
‑
rom或其他光盘存储设备、磁盘存储设备、半导体存储设备或其他存储设备,或者可以用于以指令或数据结构的形式存储期望的程序代码并且可以由计算机访问的任何其他介质;本文使用的磁盘和光盘包括压缩光盘(cd)、激光盘、光学光盘、数字多功能盘(dvd)、软盘和蓝光光盘,其中磁盘通常磁性地再现数据,而光盘用激光光学地再现数据。以上的组合也应该包括在计算机可读介质的范围内。
232.除了存储在计算机可读存储介质上之外,指令和/或数据可以被提供为通信装置中包括的传输介质上的信号。例如,通信装置可以包括具有指示指令和数据的信号的收发器。指令和数据被配置成使一个或多个处理器实现权利要求中概述的功能。也就是说,通信装置包括传输介质,该传输介质具有指示信息的信号以执行所公开的功能。在第一时间,包括在通信装置中的传输介质可以包括信息的第一部分以执行所公开的功能,而在第二时间,包括在通信装置中的传输介质可以包括信息的第二部分以执行所公开的功能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。