1.本发明涉及用于估算车辆组合的至少一个挂车的轴距长度的方法,该车辆组合包括牵引车、至少一个挂车和一个以上的铰接接头。本发明还涉及用于牵引车的控制单元、牵引车、计算机程序和/或承载计算机程序的计算机可读介质。
2.本发明可以应用于重型车辆,诸如卡车、公共汽车和建筑设备。虽然本发明将针对重型卡车进行描述,但本发明不限于这种特定车辆,而是还可以用于其他车辆,诸如轻型卡车、铰接式运输车、挖掘机、轮式装载机和反铲装载机。
背景技术:
3.近年来,人们越来越关注开发更先进的车辆驾驶辅助系统。这包括倒车辅助系统、车道保持辅助系统、车道变换辅助系统、转向辅助系统等。因此,车辆可以包括用于在不同情况下辅助车辆驾驶员的辅助系统。此外,这些系统类型不仅可以用于辅助驾驶员,而且可以有利地在全自动或半自动车辆中实施。因此,该系统还可以适于在驾驶情况期间的至少有限的时间段内执行所有控制操作。
4.包括牵引车和一个或多个连接的挂车的车辆组合可以受益于使用这些类型的系统,因为所述车辆组合在某些情况下可能更难以处理,诸如在倒车期间。当所述车辆组合包括一个以上的铰接接头、即车辆组合具有一个以上铰接角时尤其如此。
5.包括一个以上的铰接接头的车辆组合的示例是所谓的“北欧组合”。所述北欧组合包括牵引卡车,该牵引卡车适于承载集装箱、自卸车车身等中的负荷。所述牵引卡车经由拖挂单元被连接到半挂车。所述拖挂单元可枢转地连接到牵引卡车,并且也可枢转地连接到半挂车,从而为车辆组合提供两个铰接接头。具有多个一个的铰接接头的车辆组合的另一示例是所谓的“双a组合”,其特征在于,牵拉车(牵引车)直接连接到半挂车,所述半挂车进而经由可枢转的拖挂单元连接到后面的挂车。
6.因为诸如在倒车操作期间可能需要轴距长度作为输入以能够估算车辆组合的行驶路径,因此挂车的轴距长度的估算对于上述系统可能是重要的。
7.美国专利申请号us2018319437 a1公开了一种用于车辆的转向辅助系统,其包括通过使用包括挂车车轮的图像来用于挂车的长度估算。设置在车辆上的摄像头用于生成挂车的图像,并且车辆还包括控制器。所述控制器接收图像并识别其中的车轮,并且使用图像中的车轮的位置或纵横比中的至少一个来确定挂车牵引角,以及实施挂车备用模式,包括在使得挂车沿着用户选择的路径倒车时,使用考虑到车辆和挂车组合的运动学模型的估算牵引角来控制转向系统。该申请的缺点在于,它不适于估算用于具有一个以上的铰接接头的车辆组合的挂车的长度。因此,已经意识到需要为具有一个以上的铰接接头的车辆组合提供挂车轴距估算。
8.此外,牵引车经常在不同的挂车之间切换。这尤其常见于商用车辆,例如卡车可能在具有不同尺寸和轴距长度的一个以上的挂车之间频繁切换。关于每个挂车的轴距长度的
信息通常也非已知。此外,挂车的一些车轮也可能偶尔不使用,这也会影响轴距长度。
技术实现要素:
9.鉴于此,本发明的目的是提供用于估算具有一个以上的铰接接头的车辆组合的挂车的轴距长度的改进方法。更具体地,本发明的目的是对于具有一个以上的铰接接头的车辆组合以高效的方式高精度估算挂车轴距长度的改进方法。此外,本发明的目的是提供用于牵引车的改进的控制单元、改进的牵引车、改进的计算机程序和/或承载计算机程序的改进的计算机可读介质。
10.根据第一方面,该目的通过根据权利要求1的方法实现。根据第二方面,该目的通过根据权利要求13的用于牵引车的控制单元实现。根据第三方面,该目的通过根据权利要求14的牵引车实现。根据第四方面,该目的通过根据权利要求17的计算机程序实现。根据第五方面,该目的通过根据权利要求18的承载计算机程序的计算机可读介质实现。
11.根据其第一方面,该目的通过一种用于估算车辆组合的至少一个挂车的轴距长度的方法来实现,该车辆组合包括牵引车、至少一个挂车和一个以上的额铰接接头,其中,牵引车包括至少一个车轮识别传感器,以用于识别至少一个挂车的车轮,该方法包括以下步骤:
12.‑
在车辆组合的使用期间,借助于至少一个传感器在至少一个挂车的至少一侧上执行多个车轮识别测量,
13.‑
在多个车轮识别测量中的每一个测量中确定至少一个挂车的至少一侧上的可识别活动车轮的数量,
14.‑
确定至少一个挂车的至少一侧上的活动车轮的总数,其中,基于确定了可识别活动车轮的最大数量的多个车轮识别测量中的至少一个测量来确定活动车轮的总数,
15.‑
至少根据确定了活动车轮的最大数量的多个车轮识别测量中的至少一个测量来确定每个可识别活动车轮的位置,以及
16.‑
基于所确定的每个活动车轮的位置来估算轴距长度。
17.通过提供如本文所公开的方法,提供了一种用于估算多铰接接头车辆组合的挂车轴距长度的改进的方法。通过本发明人认识到在行驶期间的有限时间段内、挂车车轮可能对于至少一个车轮识别传感器而言不可见,已经认识到可以通过考虑可识别活动车轮的总数的、传感器的测量来提供改进的估算精度。该方法基于如下假设:识别出的活动车轮的最大数量对应于至少一个挂车的活动车轮的总数。此外,因为可以忽略识别出极少活动车轮的一个或多个更不可靠的测量,因此该方法还可以在更短的时间内提供轴距估算。从而可以使用更少的测量来进行估算,直到达到可靠的结果。更进一步地,因为可以忽略未识别出活动车轮的总数的测量,或者至少可以忽略识别出少于车轮总数的这些测量中的一个或多个,因此该方法还可以得到用于轴距估算的更简便的计算算法。即,根据并非所有活动车轮都已被识别的测量来估算轴距长度可能会更加困难。
18.本文所使用的术语“活动车轮”可以被定义为正在旋转并与所述车辆组合正在运行的道路相接触的一个或多个车轮。仅作为示例,当挂车未装载时,挂车上的车轮可能被停用。可以例如通过升高车轮使其不接触道路来执行车轮的停用。
19.可选地,可以根据确定了活动车轮的最大数量的多个车轮识别测量来确定每个活
动车轮的位置,并且其中,所估算的轴距长度是至少基于所述测量的平均值。因此,通过考虑用于估算的一个以上的这样的测量,可以进一步改进估算。可以通过使用不同的方法、诸如通过使用计算例如众数值、中值和/或中间值的统计方法来提供平均值。所述平均值可以是根据确定了活动车轮的最大数量的多个车轮识别测量中的每一个而得的估算的轴距长度的平均值。可替代地,所述平均值可以基于所确定的每个活动车轮的位置的平均值,由此可以估算轴距长度。
20.可选地,可以相对于参考点、优选是设置在牵引车上的参考点来确定每个活动车轮的位置。
21.可选地,可以通过识别每个活动车轮的多普勒分布来确定每个活动车轮的位置。即,已经认识到,识别车轮的多普勒分布可以有助于提供活动车轮的可靠位置估算。事实上,车轮的多普勒分布仅在车轮旋转时才可识别。通过识别来自车轮的多普勒分布,还可以提供估算位置的改进精度。仍然可选地,所识别的多普勒分布可以包括活动车轮的外周端处的速度v和活动车轮的径向相反外端处的速度
‑
v,其中,所述速度在两个外端之间线性变化。仍然可选地,所确定的每个活动车轮的位置可以优选地是两个外端之间的、速度为零的位置。该位置也可以被称为车轮的中心位置。通过考虑车轮的线性速度曲线,可以提高位置估算的精度。优选地,所述外周端位置位于车轮的顶部位置和车轮的底部位置。
22.可选地,所述轴距长度可以是至少一个挂车的有效轴距长度。有效轴距长度可以定义为在车辆组合转弯期间、挂车枢转处的位置之间的长度。例如,具有多轴后端、诸如在后端处彼此靠近定位的两个或三个轮轴的挂车将具有位于其间某处的有效轮轴位置。通过识别邻近轮轴的每个相应轮轴的每个活动车轮的位置,可以计算/估算有效轮轴位置。如何计算有效轮轴位置为本领域技术人员众所周知,因此本文不再详细描述。然而,仅作为示例,在挂车后端具有两个邻近轮轴的情况下,所估算的轮轴位置可以是位于两个轮轴的两个识别出的车轮位置之间的中间处的位置。
23.可选地,可以通过将车轮分组为具有有效公共轮轴的至少一个车轮组的步骤来提供有效轴距长度,其中,基于所确定的每个车轮的位置来进行车轮的分组。例如,挂车可以在挂车的后部位置处具有有效公共轮轴和/或在挂车的前部位置处具有有效公共轮。车轮的分组可以例如通过比较识别出的活动车轮之间的距离来执行,由此对位于特定距离内的车轮进行分组,和/或通过识别指示挂车的前轮轴组与后轮轴组之间的距离的距离来对车轮进行分组。
24.可选地,该方法还可以包括识别哪个车轮和/或哪个车轮组与车辆组合的哪个挂车相关联的步骤。这可以例如通过比较不同的识别出的活动车轮之间的距离来执行,由此将车轮分组为不同的组,并将车轮与不同的挂车和/或(一个或多个)拖挂单元相关联。在上下文中,应当注意,拖挂单元可以被认为是车辆组合的单独挂车单元。然而,拖挂单元可以永久连接到例如挂车,因此这种挂车的有效轴距长度可以被定义为拖挂单元的有效轮轴位置与位于挂车后端附近的车轮组的有效轮轴位置之间的长度。
25.可选地,可以在车辆组合的向前行驶期间对活动车轮的总数进行确定。
26.可选地,该方法还可以包括识别至少一个挂车何时正在或已经被连接到牵引车和/或从牵引车释放的步骤。因此,可以通过获知优选地应该何时开始和/或重新开始测量来进一步改进该方法。事实上,轴距估算不仅可以连续执行,而且可以有利地在挂车已经连
接到牵引车之后的有限时间段内执行。因此,该方法在车辆组合的使用期间不会占用不必要的处理能力。
27.可选地,该方法还可以包括将至少一个挂车的所估算的轴距长度作为输入提供给倒车辅助系统、前进行驶期间的转向辅助系统、牵引车的车道变换辅助系统和车道保持辅助系统中的至少一个的步骤。通过向这些辅助系统提供所估算的轴距长度,可以提高倒车辅助系统和/或其他系统的精度,因为它们将接收对至少一个挂车的轴距长度的高精度估算。
28.可选地,该方法还可以包括确定车辆组合的至少一个铰接接头的当前铰接角的步骤。仅作为示例,铰接角的确定可以由至少一个传感器提供,或者可替代地由设置在车辆组合上的一个或多个辅助传感器提供。获知铰接角可以进一步改进轴距估算。例如,活动车轮的当前确定位置可以取决于车辆组合的牵引车与挂车之间的当前相对角度位置。因此,进一步通过获知当前铰接角,可以进一步改进轴距估算。
29.根据其第二方面,该目的通过一种用于牵引车的控制单元来实现,该控制单元被构造成执行根据本发明的第一方面的任一实施例的方法的步骤。本发明的第二方面的优点类似于本发明的第一方面的优点。还应当注意,本发明的第一方面的所有实施例适用于本发明的第二方面的所有实施例,反之亦然。
30.根据其第三方面,该目的通过一种用于车辆组合的牵引车实现,该车辆组合包括至少一个挂车和一个以上的铰接接头,该牵引车包括:
31.‑
至少一个车轮识别传感器,用于识别至少一个挂车的车轮,以及
32.‑
根据本发明的第二方面的任一实施例的控制单元。
33.本发明的第三方面的优点类似于本发明的第一方面和第二方面的优点。还应当注意,本发明的第一方面和第二方面的所有实施例适用于本发明的第三方面的所有实施例,反之亦然。
34.可选地,至少一个传感器可以是摄像传感器、lidar(光探测和测距)传感器、radar(无线电探测和测距)传感器或sonar(声音导航和测距)传感器中的任一种。仍然可选地,所述至少一个传感器可以是设置在牵引车的左侧或右侧的侧传感器。
35.可选地,牵引车可以是诸如重型卡车和/或挂车卡车这样的卡车、公共汽车、建筑设备车辆中的任一种。
36.根据其第四方面,该目的通过一种包括程序代码装置的计算机程序来实现,当所述程序在计算机上运行时,该程序代码装置用于执行本发明的第一方面的任一实施例的步骤。
37.根据其第五方面,该目的通过一种承载计算机程序的计算机可读介质来实现,该计算机程序包括程序代码装置,当所述程序产品在计算机上运行时,该程序代码装置用于执行本发明的第一方面的任一实施例的步骤。
附图说明
38.参考附图,下面是作为示例引用的本发明的实施例的更详细描述。
39.在附图中:
40.图1示出了根据本发明的示例实施例的方法的流程图;
41.图2从上方示出了本发明的示例实施例的车辆组合;
42.图3示出了图2中的车辆组合,其中,车辆组合被不同地定位;
43.图4示出了根据本发明的示例实施例的挂车的车轮的示意图;以及
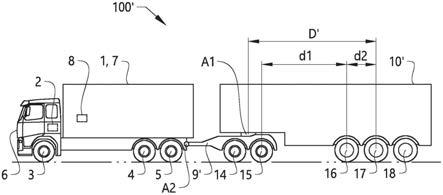
44.图5从侧面示出了根据本发明的示例实施例的车辆组合的视图。
45.所述附图示出了本发明的图示性示例实施例,因此不必按比例绘制。应当理解,所示出和描述的实施例是示例性的,本发明不限于这些实施例。还应当注意,为了更好地描述和说明本发明,可能会夸大附图中的一些细节。除非另有说明,否则相同的参考标记在整个描述中指代相同的元件。
具体实施方式
46.图1示出了本发明方法的示例实施例的流程图,图2和图3从上方示出了车辆组合100,其中,被连接的挂车10位于两个不同的位置。在该示例中,车辆组合100是所谓的“北欧组合”,其包括牵引车1、挂车10以及连接所述挂车10和牵引车1的拖挂单元9。所述车辆组合包括两个铰接接头a1和a2。牵引车1(在此是重型卡车)包括驾驶室6和装载空间7。在一侧定位有传感器2,以用于识别拖挂单元9和挂车10的车轮。侧传感器2在此是雷达传感器。该传感器还可以有利地用于其他任务,诸如用于盲点检测。如上文所述,拖挂单元9可以被认为是单独的挂车或挂车10的一体部分。从车辆组合的向前行驶方向观察,所述牵引车包括前轮3和后轮4、5,并且挂车10在其左手一侧包括两个后轮12、13。此外,拖挂单元9在其左手一侧包括一个车轮11。
47.图1中的流程图示出了用于估算包括挂车1的车辆组合100(诸如图2和图3所示的车辆组合100)的至少一个挂车10的轴距长度d的方法。该方法包括以下步骤:
48.‑
步骤s1:在车辆组合100的使用期间,借助于至少一个传感器2在至少一个挂车10的至少一侧上执行多个车轮识别测量,
49.‑
步骤s2:在所述多个车轮识别测量中的每一个中确定至少一个挂车10的至少一侧上的可识别活动车轮的数量,
50.‑
步骤s3:确定至少一个挂车10的至少一侧上的活动车轮的总数,其中,基于所述多个车轮识别测量中的至少一个来确定所述活动车轮的总数,在所述多个车轮识别测量中的至少一个中,可识别活动车轮的最大数量已被确定,
51.‑
步骤s4:至少根据所述多个车轮识别测量中的所述至少一个来确定每个可识别活动车轮的位置,在所述多个车轮识别测量中的所述至少一个中,所述活动车轮的最大数量已被确定,以及
52.‑
步骤s5:基于所确定的每个活动车轮的位置来估算轴距长度d。
53.特别参考图2和图3,牵引车1还包括连接到传感器2的控制单元8。所述控制单元8可以是牵引车1的任何种类的控制单元,例如ecu(电子控制单元),其也可以被构造成用于执行其他控制功能。所述控制单元8可以包括处理单元和承载计算机程序的存储单元,该计算机程序包括用于执行本发明的第一方面的任何实施例的步骤的程序代码装置。所述传感器2可以通过电线和/或通过无线连接而连接到所述控制单元。所述传感器2与所述控制单元之间的通信可以例如通过can总线系统、蓝牙、wifi或通过任何其他已知的通信系统来执行。
54.图2中的车辆组合100定位成使得传感器2能够在向前行驶期间识别一个活动车轮11,而所述挂车10的车轮12和13对于传感器2而言不可见。因此,如果此时传感器在挂车10的左手侧执行车轮识别测量,则将能够仅识别车轮11。所述车辆组合100的这种特定位置可以称为“z构造”,其中,字母“z”指的是所述车辆组合100的不同部分(牵引车、拖挂单元和挂车)相对于彼此的相对方位。所执行的车轮识别测量可以被认为是基于从传感器2生成的信息的一个单独的帧或样本。因此该帧或样本将提供这样的信息:在挂车的一侧存在一个车轮。当车辆组合100继续向前移动时,它最终可能会停留在如图3所示的位置。在这个位置,所述挂车10和拖挂单元9的左手侧上的所有车轮11、12和13可以被传感器2识别。然后,传感器2可以在此时执行第二车轮识别测量,从而提供第二帧或样本,其中,识别了三个活动轮11、12和13。从以上两个测量(即,两个帧或样本,也可以称为图1中的步骤s1和s2)中,可以确定至少一个挂车的至少一侧上的活动车轮的总数。这样做在于基于车轮识别测量来确定活动车轮的总数,在所述车轮识别测量中,识别了三个可识别的活动车轮,即,来自两次测量的最大数量。该步骤可以称为图1中的步骤s3。根据识别了三个车轮的所述帧或样本,可以确定每个活动车轮11、12和13的位置。可以例如通过识别每个车轮的多普勒分布来提供所述位置,下文参考图4进一步所述。所述方法的这部分可以称为图1中的步骤s4。此外,优选地,相对于参考点、优选是牵引车1上的参考点来确定每个位置。每个车轮的位置可以例如在通过x
‑
y平面或x
‑
y
‑
z空间限定的二维或三维空间中的坐标系、诸如笛卡尔坐标系中限定。基于所确定的每个活动车轮11、12和13的位置,可以估算挂车的轴距长度d。该方法的这部分可以称为图1中的步骤s5。在此,所估算的轴距d是挂车10的有效轴距。可以看出,有效轴距长度d从铰接接头a1延伸到位于车轮12与13之间的中间的位置。
55.为了进一步改进轴距估算,可以设置至少一个传感器以用于检测所述车辆组合的至少一个铰接接头的角度。在优选实施例中,通过从一个或多个传感器提供的信息获知接头a1和a2处的所有铰接角。所述一个或多个传感器例如可以是设置在牵引车的后端处的附加传感器,诸如超声波传感器等。此外,可以在铰接接头处设置适于测量当前铰接角的传感器。仍然可选地,可以使用动态车辆模型来进一步改进轴距估算。仅作为示例,本文估算的动态车辆模型、测量的铰接角、偏航率、gnss(全球导航卫星系统)位置及航向和车轮位置以及轴距长度估算中的至少一项可以结合在标准卡尔曼滤波器类型计算中,以提供进一步改进的轴距估算。卡尔曼滤波器为本领域技术人员众所周知,并且例如在书籍《“超越卡尔曼滤波器:用于跟踪应用的粒子滤波器”》(branco ristic,sanjeev arulampalam and neil gordon,artech house出版社,波士顿,伦敦2004]中进行了解释。此外,还可以通过获知每个联接点、在该实施例中为铰接接头a1和a2的位置来进一步改进估算。例如,在卡车与拖挂件之间没有通信连接的北欧组合车辆中,第二联接点通常相当接近于定位在拖挂件轮轴的中心附近。对于仅具有经由通信链路连接到卡车的第一挂车和第二挂车的双a组合而言,所述联接点可以在卡车处通信并获知。
56.图4示出了一个活动车轮的侧视图,在此例示为图2和图3的车轮11。车轮11是活动的,即,它关于中心点c围绕轮轴(未示出)旋转。车轮识别传感器、优选为radar或lidar传感器能够检测车轮的速度分布,其可以定义为多普勒分布,其识别活动车轮的外周端处的速度v和活动车轮的径向相反外端处的速度
‑
v。所述速度在所述两个外端之间呈线性变化。在该实施例中,所述两个外端基本上位于车轮11的顶部和底部位置。通过多普勒分布,可以以
可靠的方式确定被定义为车轮中心点c的车轮11的位置。所述位置c是多普勒分布中的速度为零的点。因此,由于车轮正在旋转,传感器可以识别每个活动车轮。此外,可能无法识别未使用且也不与地面接触的车轮。因为这些车轮不会影响挂车的有效轴距,因此优选地不识别这些车轮。一旦这样的车轮被激活,即,与地面接触,它就可以通过其多普勒分布来识别。因此,鉴于此,本发明提供一种用于识别可以随时间变化的挂车的有效轴距长度的有效且灵活的方法。
57.图5示出了车辆组合100'的侧视图,该车辆组合包括牵引卡车1和经由拖挂单元9'与其连接的挂车10'。牵引卡车1类似于图2和图3所示的卡车,即,它包括:位于其左手侧的三个车轮3、4和5;定位在同一侧的传感器2;控制单元8和铰接接头(联接点)a2。它还具有用于驾驶员的驾驶室6和装载空间7。可以以与以上解释的类似的方式执行用于识别挂车10'的轴距长度d'的方法。相对于所述车辆组合100'的向前行驶方向,该实施例中的拖挂单元9'在其左手侧具有两个车轮14和15。此外,从车辆组合1的侧面看,铰接接头a1基本上放置在两个车轮之间的中间处。因此,可以通过获知两个车轮14和15的位置并且估算所述铰接点位于所述车轮之间、诸如所述车轮之间的中间处来确定所述铰接接头a1的位置。
58.所述车轮14、15、16、17和18也可以分组成不同的车轮组。在该示例中,所述车轮组优选地是包括车轮14和15的、所述拖挂单元9'的第一车轮组以及包括车轮16、17和18的、所述挂车10'的第二车轮组。可以通过确定不同车轮之间的相对距离来执行所述分组。这优选地通过使用来自利用传感器2而确定的、每个车轮的所确定的位置来完成。例如,根据所确定的位置,可以确定车轮15与16之间的距离d1和车轮16与17之间的距离d2。由此可以得出结论:因为距离d1远大于距离d2,因此车轮16和17属于一个车轮组,车轮15属于另一车轮组。可以对所有车轮执行该过程,其中基于所确定的车轮位置来确定不同车轮之间的相对距离。此外,还可以确定哪个车轮属于哪个挂车(或拖挂单元)。例如,这可以通过使用由传感器2进行的多个测量中的一个或多个测量并且通过确定车轮位置是否可以沿一个或多个假想轴定位来加以确定。例如,可以根据所确定的车轮位置、根据一个或多个测量来确定车轮14和15可以沿着第一假想轴放置,车轮16、17和18可以沿着第二假想轴放置,该第二假想轴相对于第一轴枢转和/或成角度。这可能表明车轮14和15是一个单元(拖挂单元9')的一部分,车轮16、17和18是另一单元(挂车10')的一部分。优选地,通过使用根据确定了车轮的最大数量的、一个以上的测量而得的车轮位置来对此加以确定。
59.如图2、图3和图5所示的实施例示出了位于牵引车1的左手侧的一个传感器2。然而,应当理解,所述牵引车1优选地包括位于其每一侧上的两个这样的传感器,并且该方法优选地利用来自这两个传感器的测量,这可以进一步提高测量的可靠性,并改进用于获得可靠估算的时间。
60.应当理解,本发明不限于上述和附图所示的实施例;相反,技术人员将认识到在所附权利要求的范围内可以做出许多改变和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。