技术特征:
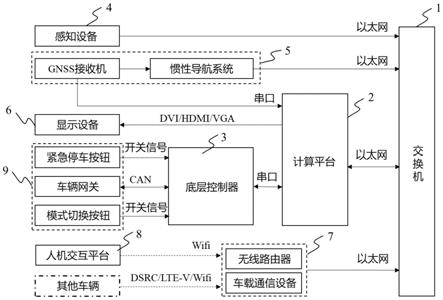
1.一种园区智能车辆自动驾驶系统架构,其特征在于,包括交换机(1)、计算平台(2)、底层控制器(3)、感知设备(4)、定位设备(5)、通信设备(7)和人机交互平台(8),所述感知设备(4)和定位设备(5)通过所述交换机(1)向所述计算平台(2)输送信息;所述人机交互平台(8)通过所述通信设备(7)向所述计算平台(2)输送信息;所述交换机(1)与所述计算平台(2)信息交互,所述底层控制器(3)通过串口连接方式所述计算平台(2)信息交互;其中,所述人机交互平台(8)包括循迹启停控制模块(81)、循迹地图选择模块(82)和控制模式选择模块(83),所述循迹启停控制模块(81)用于发送启动或停止控制指令,循迹地图选择模块(82)用于发送选择好的循迹地图信息加载指令,控制模式选择模块(83)用于发送横向或纵向控制模式激活指令,当供电系统(10)供电正常并完成控制系统参数初始化后,所述计算平台(2)用于接收所述启动控制指令,并在车辆状态正常情形下,加载所述循迹地图信息,然后判断车辆位置与姿态信息解析是否准确,在判定为准确后,则继续判断车辆当前位置点是否在期望循迹轨迹上,在判断为“是”的情形下,则根据期望循迹轨迹和车辆当前位置计算期望转向角和期望车速,并通过串口发送到所述底层控制器(3)。2.如权利要求1所述的园区智能车辆自动驾驶系统架构,其特征在于,所述供电系统(10)提供彼此独立的三条供电线路,分别为上层直流供电总线、底层直流供电总线以及交流供电总线,所述供电系统(10)包括主电源(11)、副电源(12)和供电线路控制单元,其中,所述主电源(11)通过车载动力源(13)充电,所述副电源(12)通过主电源(11)充电,所述供电线路控制单元包括:工作电压需求判断子单元,其用于判断工作电压需求d
v
;用电设备工作功率需求判断子单元,其用于根据所述工作电压需求判断子单元的判定结果,以及用电设备正常工作功率需求d
p
和额定功率p1的比较结果,确定一所述供电线路,其中,p1根据所述主电源(11)和副电源(12)的额定功率大小进行确定。3.如权利要求2所述的园区智能车辆自动驾驶系统架构,其特征在于,所述副电源(12)依序通过上层开关(14)和充电开关(15)与所述主电源(11)连接,所述上层直流供电总线中的稳压电源a和b,分别连接到所述上层开关(14)和充电开关(15)之间、所述副电源(12)的输出端,所述底层直流供电总线的输入端通过下层开关(16)连接到所述主电源(11)与上层开关(14)之间,所述交流供电总线的输出端与所述副电源(12)的输出端之间设逆变器(17),输出220v交流电,上电顺序包括:优先闭合下层开关(16),为所述底层控制器(3)提供12v直流电;其次,启动车载动力源(13)为主电源(11)充电;再其次闭合上层开关(14)为上层直流供电总线提供12v直流电,同时闭合充电开关(15)为副电源(12)充电;最后启动逆变器(7),通过交流供电总线提供220v电压。4.如权利要求3所述的园区智能车辆自动驾驶系统架构,其特征在于,所述用电设备工作功率需求判断子单元在判定d
v
为12v直流的情形下,分为如下三种情形确定所述供电线路:情形一,d
p
<p1,所述供电线路为所述底层直流供电总线;情形二,d
p
<p1,所述供电线路为所述上层直流供电总线中的稳压电源a;情形二,d
p
≥p1,所述供电线路为所述上层直流供电总线中的稳压电源b;所述用电设备工作功率需求判断子单元在判定d
v
为220v交流的情形下,且d
p
≥p1,所述
供电线路为所述交流供电总线。5.如权利要求1至4中任一项所述的园区智能车辆自动驾驶系统架构,其特征在于,所述计算平台(2)包括:预瞄距离计算单元,其用于根据公式(3),计算预瞄距离d
p
:式中,k
ρ
为曲率预瞄调节因子,k
v
车速预瞄调节因子,con1为曲率调节因子,v为当前车速,ρ为当前路点曲率;预瞄点选择单元,其用于根据期望循迹轨迹、车辆当前位置和d
p
,确定预瞄点;车速控制单元,其用于根据检测到的车辆前方循迹轨迹上的障碍物情况,确定期望车速的大小;期望转向角计算单元,其用于根据由当前路点对应轨迹曲率决定的曲率转向角和预瞄点所决定的跟踪转向角,确定期望转向角的大小。6.如权利要求5所述的园区智能车辆自动驾驶系统架构,其特征在于,根据所述感知设备(4)检测到的车辆前方循迹轨迹上的障碍物情况进行纵向车速控制,具体包括:无障碍物情形下,根据ρ,通过式(5)计算期望车速v
tar
:式中,k
vt
为用于保证期望车速随曲率增大而减小曲率速度调节因子,且k
vt
>0;con2为用于避免曲率很小时计算得到过大的目标车速的常数,其取值范围为0
‑
0.02;若v
tar_0
>v
max
,则v
tar
=v
max
,若|v
tar_0
‑
v|>δv
max
且(v δv
max
)<v
max
,则v
tar
=v δv
max
,否则v
tar
=v
tar_0
,δv
max
为v与v
tar
之间可保障乘坐舒适性的车速变化限值,v
max
为最高车速;有障碍物情形下,根据不同的避障策略计算v
tar
,具体包括:若车辆前方障碍物与车辆的距离s>(d
b_min
δs),则执行减速停车避障策略,通过式(6)计算v
tar
,为v
tar
下最短制动距离,a
max
为最大制动减速度;式中,δs为车辆静止时与障碍物之间的最小安全距离;若s≤(d
b_min
δs),则需要执行换的避障策略,根据规划的换道轨迹所对应的曲率ρ
s
,通过式(5)计算v
tar
。7.如权利要求6所述的园区智能车辆自动驾驶系统架构,其特征在于,通过式(9),计算预瞄点所决定的跟踪转向角θ
p
:e
i
=(1
‑
k)δ
p
kδ
x
ꢀꢀ
(8)式中,e
i
为第i个周期的横向转角控制的输入偏差,e
i
‑1为第i
‑
1个周期的横向转角控制的输入偏差,其通过式(8)计算得到,t为控制周期,k
p
为pid控制比例系数,k
i
为pid控制积分
系数,k
d
为pid控制微分系数,k为取值范围为[00.1]的横摆角差权重,δ
p
为预瞄角差,δ
x
为横摆角差。8.一种园区智能车辆自动驾驶系统循迹控制方法,其特征在于,包括:步骤s1,通过供电系统(10)供电,人机交互平台(8)通过通信设备(7)向计算平台(2)发送启动控制指令,所述计算平台(2)完成自动驾驶控制系统参数初始化;步骤s2,所述计算平台(2)根据底层控制器(3)通过车辆网关(9)获取的车辆状态信息,判断车辆状态是否正常,如果是,则进入步骤s3;步骤s3,所述计算平台(2)根据所述交换机(1)输送的所述人机交互平台(8)选择的循迹地图信息,加载所述循迹地图信息,并根据所述交换机(1)输送的定位设备(5)获取的车辆定位信息,判断车辆位置与姿态信息解析是否准确,如果是,则进入步骤s4;步骤s4,所述计算平台(2)判断车辆当前位置点是否在期望循迹轨迹上,如果是,则进入步骤s5;步骤s5,所述计算平台(2)根据期望循迹轨迹和车辆当前位置,计算期望转向角和期望车速,并发送到所述底层控制器(3);步骤s6,所述计算平台(2)根据所述交换机(1)输送的所述人机交互平台(8)的控制模式激活指令,判断是否采用人工驾驶,如果是,则由人工驾驶,否则,进入步骤s7;步骤s7,所述计算平台(2)判断所述人机交互平台(8)是否发送停车控制指令或是否到达目标停车位置,如果是,则发送停车指令给所述底层控制器(3)。9.如权利要求8所述的园区智能车辆自动驾驶系统循迹控制方法,其特征在于,所述供电系统(10)提供彼此独立的三条供电线路,分别为上层直流供电总线、底层直流供电总线以及交流供电总线,所述供电系统(10)包括主电源(11)和副电源(12),其中,所述主电源(11)通过车载动力源(13)充电,所述副电源(12)通过主电源(11)充电,所述供电系统(10)的所述供电线路控制方法具体包括:步骤s11,判断工作电压需求d
v
;步骤s12,在所述步骤s11判定d
v
为12v直流的情形下,分为如下三种情形确定所述供电线路:情形一,d
p
<p1,所述供电线路为所述底层直流供电总线;情形二,d
p
<p1,所述供电线路为所述上层直流供电总线中的稳压电源a;情形二,d
p
≥p1,所述供电线路为所述上层直流供电总线中的稳压电源b;在所述步骤s11判定d
v
为220v交流的情形下,且d
p
≥p1,所述供电线路为所述交流供电总线;其中,p1根据所述主电源(11)和副电源(12)的额定功率大小进行确定。10.如权利要求9所述的园区智能车辆自动驾驶系统循迹控制方法,其特征在于,所述步骤s5具体包括:步骤s51,根据公式(3),计算预瞄距离d
p
:式中,k
ρ
为曲率预瞄调节因子,k
v
车速预瞄调节因子,con1为曲率调节因子,v为当前车速,ρ为当前路点曲率;
步骤s52,根据期望循迹轨迹、车辆当前位置和d
p
,确定预瞄点;步骤s53,根据检测到的车辆前方循迹轨迹上的障碍物情况,确定期望车速和横向转角的大小,其具体包括:无障碍物情形下,根据ρ,通过式(5)计算期望车速v
tar
:式中,k
vt
为用于保证期望车速随曲率增大而减小曲率速度调节因子,且k
vt
>0;con2为用于避免曲率很小时计算得到过大的目标车速的常数,其取值范围为0
‑
0.02;若v
tar_0
>v
max
,则v
tar
=v
max
,若|v
tar_0
‑
v|>δv
max
且(v δv
max
)<v
max
,则v
tar
=v δv
max
,否则v
tar
=v
tar_0
,δv
max
为v与v
tar
之间可保障乘坐舒适性的车速变化限值,v
max
为最高车速;有障碍物情形下,根据不同的避障策略计算v
tar
,具体包括:若车辆前方障碍物与车辆的距离s>(d
b_min
δs),则执行减速停车避障策略,通过式(6)计算v
tar
,为v
tar
下最短制动距离,a
max
为最大制动减速度;式中,δs为车辆静止时与障碍物之间的最小安全距离;若s≤(d
b_min
δs),则需要执行换的避障策略,根据规划的换道轨迹所对应的曲率ρ
s
,通过式(5)计算v
tar
;步骤s54,根据由当前路点对应轨迹曲率决定的曲率转向角和式(9)表示的预瞄点所决定的跟踪转向角θ
p
,确定期望转向角的大小:e
i
=(1
‑
k)δ
p
kδ
x
ꢀꢀ
(8)式中,e
i
为第i个周期的横向转角控制的输入偏差,e
i
‑1为第i
‑
1个周期的横向转角控制的输入偏差,其通过式(8)计算得到,t为控制周期,k
p
为pid控制比例系数,k
i
为pid控制积分系数,k
d
为pid控制微分系数,k为取值范围为[00.1]的横摆角差权重,δ
p
为预瞄角差,δ
x
为横摆角差。
技术总结
本发明公开了一种园区智能车辆自动驾驶系统架构及循迹控制方法,该架构包括交换机、计算平台、底层控制器、感知设备、定位设备、通信设备和人机交互平台,人机交互平台通过通信设备向计算平台输送信息;当供电系统供电正常并完成控制系统参数初始化后,交换机与计算平台进行信息交互,计算平台用于接收人机交互平台发布的启动控制指令,并在车辆状态正常情形下,加载循迹地图信息,然后判断车辆位置与姿态信息解析是否准确,在判定为准确后,则继续判断车辆当前位置点是否在期望循迹轨迹上,在判断为“是”的情形下,则根据期望循迹轨迹和车辆当前位置计算期望转向角和期望车速,并通过串口发送到底层控制器。本发明能够实现园区智能车辆安全、可靠、低功耗的完成自动驾驶任务。低功耗的完成自动驾驶任务。低功耗的完成自动驾驶任务。
技术研发人员:王雷 王宜飞 贾立东
受保护的技术使用者:紫清智行科技(北京)有限公司
技术研发日:2021.08.23
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。