1.本发明涉及天线技术领域,尤其涉及一种车载毫米波雷达及其发射天线系统及接收天线系统、天线系统。
背景技术:
2.目前,汽车安全配置关系到汽车的安全驾驶性能,已经成为客户选购汽车的一项重要参考指标。
3.而随着汽车技术的发展,汽车将车载毫米波雷达作为安全驾驶组件配置到汽车上,车载毫米波雷达是否能准确地工作,直接影响到汽车的安全驾驶。
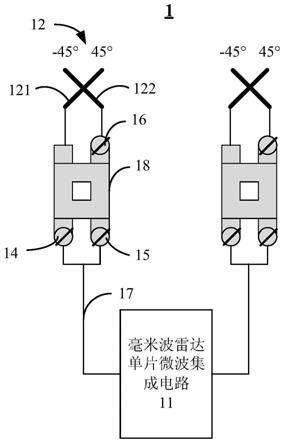
4.目前,如图1所示,车载毫米波雷达采用的天线为单一极化,或者极化数量较少,当周围有相同极化雷达工作时,存在同频干扰,同频干扰现象严重,影响目标检测的精度的准确性,为汽车的安全驾驶埋下安全隐患。
技术实现要素:
5.本发明实施例旨在提供一种车载毫米波雷达及其发射天线系统及接收天线系统、天线系统,可以使天线系统可以实现任意线极化、左圆极化和右圆极化工作模式,能够适应不同工作环境,毫米波雷达根据不同环境的变化选择相应的极化状态,大幅提升系统同频抗干扰水平,达到更优的同频抗干扰性能,提高目标检测精度的准确性。
6.为解决上述技术问题,本发明实施例提供以下技术方案:一种车载毫米波雷达发射天线系统,所述发射天线系统包括:毫米波雷达单片微波集成电路,至少一组发射天线组,至少一个功分网络以及至少一个正交耦合器;其中:
7.所述毫米波雷达单片微波集成电路包括至少一条发射通道;一条发射通道、一个功分网络、一个正交耦合器、一组发射天线依次连接形成一条电磁信号发射链路;
8.所述毫米波雷达单片微波集成电路,用于通过所述发射通道发射电磁信号传输到所述功分网络;
9.所述功分网络,用于将所述毫米波雷达单片微波集成电路的发射通道发射的电磁信号分为两路发射信号后传输到所述正交耦合器;
10.所述发射天线组包括第一极化天线和第二极化天线,所述第一极化天线和所述第二极化天线的极化方向相差90
°
;
11.所述正交耦合器,用于将所述功分网络传输的两路发射信号进行耦合后分为两路耦合发射信号,其中一路耦合发射信号传输到所述第一极化天线,另一路耦合发射信号传输到所述第二极化天线。
12.可选地,所述正交耦合器包括输入端口和隔离端口;所述发射天线系统还包括第一移相器和第二移相器;
13.所述功分网络将所述毫米波雷达单片微波集成电路的发射通道发射的电磁信号分为两路发射信号,其中一路发射信号经过所述第一移相器后传输到正交耦合器的输入端
口,另一路发射信号经过所述第二移相器后传输到正交耦合器的隔离端口。
14.可选地,所述发射天线系统还包括第三移相器;所述正交耦合器将另一路耦合发射信号经过第三移相器后传输到所述第二极化天线。
15.可选地,所述第一极化天线为45
°
发射极化天线,所述第二极化天线为
‑
45
°
发射极化天线。
16.可选地,所述发射天线组为双极化天线,所述双极化天线的天线间的极化方向相差90
°
。
17.可选地,所述第一移相器和第二移相器分别用于控制所述正交耦合器的输入端口和隔离端口的功率比;所述第三移相器用于控制所述正交耦合器的输入端口和隔离端口的相位关系;
18.当输入端口和隔离端口的相位相同时,通过控制第一移相器和第二移相器以控制正交耦合器的输入端口和隔离端口的功率比从1:0到0:1变化时,发射天线系统的极化方向从45
°
极化逐渐变成135
°
极化;
19.当输入端口和隔离端口的相位相差180
°
时,通过控制第一移相器和第二移相器以控制正交耦合器的输入端口和隔离端口的功率比从1:0到0:1变化时,发射天线系统的极化方向从45
°
极化逐渐变成
‑
45
°
极化;
20.当输入端口和隔离端口相位相差90
°
时,输入端口与隔离端口的功率比为1:1时,发射天线系统为左旋圆极化;
21.当输入端口和隔离端口相位相差270
°
时,输入端口与隔离端口的功率比为1:1时,发射天线系统为右旋圆极化。
22.为解决上述技术问题,本发明实施例还提供以下技术方案:一种车载毫米波雷达接收天线系统,所述接收天线系统包括:毫米波雷达单片微波集成电路,至少一组接收天线组,至少一个功分网络以及至少一个正交耦合器;其中:
23.所述毫米波雷达单片微波集成电路包括至少一条接收通道;一条接收通道、一个功分网络、一个正交耦合器、一组接收天线依次连接形成一条电磁信号接收链路;
24.所述接收天线组包括第三极化天线和第四极化天线,所述第三极化天线和所述第四极化天线的极化方向相差90
°
,所述第三极化天线和所述第四极化天线分别接收一路空中电磁信号,分别传输给所述正交耦合器;
25.所述正交耦合器,用于将来自接收天线组接收的两路空中电磁信号进行耦合后分为两路接收信号,传输到所述功分网络;
26.所述功分网络,用于将正交耦合器耦合的两路接收信号合并为一路接收信号后传输到所述毫米波雷达单片微波集成电路的接收通道;
27.所述毫米波雷达单片微波集成电路,用于通过所述接收通道接收来自所述功分网络传输的接收信号。
28.可选地,所述正交耦合器包括输入端口和隔离端口;所述接收天线系统还包括第一移相器,第二移相器和第三移相器;
29.所述正交耦合器将接收一路来自第三极化天线接收的空中电磁信号,经耦合得到一路接收信号后传输到输入端口,再将该路接收信经过所述第一移相器传输到所述功分网络,以及将接收另一路来自第四极化天线接收且经过第三移相器传输后的空中电磁信号,
经耦合得到另一路接收信号后传输到隔离端口,再将该路接收信号经过所述第二移相器传输到所述功分网络。
30.可选地,所述第三极化天线为45
°
接收极化天线,所述第四极化天线为
‑
45
°
接收极化天线。
31.可选地,所述接收天线组为双极化天线,所述双极化天线的天线间的极化方向相差90
°
。
32.可选地,所述功分网络用于将正交耦合器耦合的两路接收信号合并为一路接收信号后传输到所述毫米波雷达单片微波集成电路的接收通道;包括:
33.所述功分网络将一路经正交耦合器耦合到输入端口后经过所述第一移相器传输到所述功分网络的接收信号与另一路经正交耦合器耦合到隔离端口后经过所述第二移相器传输到所述功分网络的接收信号合并为一路接收信号传输到所述毫米波雷达单片微波集成电路的接收通道。
34.可选地,所述第一移相器和第二移相器分别用于控制所述正交耦合器的输入端口和隔离端口的功率比;所述第三移相器用于控制所述正交耦合器的输入端口和隔离端口的相位关系;
35.当输入端口和隔离端口的相位相同时,通过控制第一移相器和第二移相器以控制正交耦合器的输入端口和隔离端口的功率比从1:0到0:1变化时,接收天线系统的极化方向从45
°
极化逐渐变成135
°
极化;
36.当输入端口和隔离端口的相位相差180
°
时,通过控制第一移相器和第二移相器以控制正交耦合器的输入端口和隔离端口的功率比从1:0到0:1变化时,接收天线系统的极化方向从45
°
极化逐渐变成
‑
45
°
极化;
37.当输入端口和隔离端口相位相差90
°
时,输入端口与隔离端口的功率比为1:1时,接收天线系统为左旋圆极化;
38.当输入端口和隔离端口相位相差270
°
时,输入端口与隔离端口的功率比为1:1时,接收天线系统为右旋圆极化。
39.为解决上述技术问题,本发明实施例还提供以下技术方案:一种车载毫米波雷达天线系统,所述车载毫米波雷达天线系统包括如本发明任一实施例所述的发射天线系统和如本发明任一实施例所述的接收天线系统。
40.为解决上述技术问题,本发明实施例还提供以下技术方案:一种车载毫米波雷达,所述车载毫米波雷达包括如本发明任一实施例所述的车载毫米波雷达天线系统。
41.与现有技术相比较,本发明实施例提供的一种车载毫米波雷达及其发射天线系统及接收天线系统、天线系统,通过毫米波雷达单片微波集成电路的一条发射通道、一个功分网络、一个正交耦合器、一组发射天线依次连接形成一条电磁信号发射链路,所述毫米波雷达单片微波集成电路通过所述发射通道发射电磁信号传输到所述功分网络,所述功分网络将所述毫米波雷达单片微波集成电路的发射通道发射的电磁信号分为两路发射信号后传输到所述正交耦合器,所述正交耦合器将所述两路发射信号进行耦合后分为两路耦合发射信号,并分别传输到所述发射天线组中极化方向相差90
°
的第一极化天线和第二极化天线。从而使发射天线系统可以实现任意线极化、左圆极化和右圆极化工作模式,能够适应不同工作环境,毫米波雷达根据不同环境的变化选择相应的极化状态,大幅提升系统同频抗干
integrated circuit),至少一组发射天线组12,至少一个功分网络17以及至少一个正交耦合器18;其中:
57.所述毫米波雷达单片微波集成电路11包括至少一条发射通道;一条发射通道、一个功分网络、一个正交耦合器、一组发射天线依次连接形成一条电磁信号发射链路。
58.所述毫米波雷达单片微波集成电路11,与所述功分网络17连接,用于通过所述发射通道发射电磁信号传输到所述功分网络。
59.所述功分网络17,与所述正交耦合器18连接,用于将所述毫米波雷达单片微波集成电路11的发射通道发射的电磁信号分为两路发射信号后传输到所述正交耦合器18。
60.所述发射天线组12包括第一极化天线121和第二极化天线122,所述第一极化天线121和所述第二极化天线122的极化方向相差90
°
。
61.所述正交耦合器18,用于将所述功分网络17传输的两路发射信号进行耦合后分为两路耦合发射信号,其中一路耦合发射信号传输到所述第一极化天线121,另一路耦合发射信号传输到所述第二极化天线122。
62.在本实施例中,如果所述发射天线系统包括:包括一条发射通道的毫米波雷达单片微波集成电路11、一组发射天线组12、一个功分网络17以及一个正交耦合器18,则所述发射通道、所述功分网络、所述正交耦合器、所述发射天线依次连接形成一条电磁信号发射链路。
63.如果所述发射天线系统包括:包括两条发射通道的毫米波雷达单片微波集成电路11、两组发射天线组12、两个功分网络17以及两个正交耦合器18,则第一条发射通道、第一个功分网络、第一个正交耦合器、第一组发射天线依次连接形成第一条电磁信号发射链路;第二条发射通道、第二个功分网络、第二个正交耦合器、第二组发射天线依次连接形成第二条电磁信号发射链路。即可以形成两条电磁信号发射链路。
64.以此类推,如果所述发射天线系统包括:包括n条发射通道的毫米波雷达单片微波集成电路11、n组发射天线组12、n个功分网络17以及n个正交耦合器18,则可以形成n条电磁信号发射链路。
65.在本实施例中,通过毫米波雷达单片微波集成电路11的一条发射通道、一个功分网络、一个正交耦合器、一组发射天线依次连接形成一条电磁信号发射链路,所述毫米波雷达单片微波集成电路11通过所述发射通道发射电磁信号传输到所述功分网络,所述功分网络17将所述毫米波雷达单片微波集成电路11的发射通道发射的电磁信号分为两路发射信号后传输到所述正交耦合器18,所述正交耦合器将所述两路发射信号进行耦合后分为两路耦合发射信号,并分别传输到所述发射天线组12中极化方向相差90
°
的第一极化天线121和第二极化天线122。从而使发射天线系统可以实现任意线极化、左圆极化和右圆极化工作模式,能够适应不同工作环境,毫米波雷达根据不同环境的变化选择相应的极化状态,大幅提升系统同频抗干扰水平,达到更优的同频抗干扰性能,提高目标检测精度的准确性。
66.在一个实施例中,如图3所示,所述正交耦合器18包括输入端口pout1和隔离端口pout2。所述发射天线系统1还包括第一移相器14和第二移相器15,所述第一移相器14和第二移相器15,分别用于控制所述正交耦合器18的输入端口pout1和隔离端口pout2的功率比。
67.所述功分网络17,用于将所述毫米波雷达单片微波集成电路11的发射通道发射的
电磁信号分为两路发射信号后传输到所述正交耦合器18;包括:
68.所述功分网络17将所述毫米波雷达单片微波集成电路11的发射通道发射的电磁信号分为两路发射信号,其中一路发射信号经过所述第一移相器14后传输到正交耦合器18的输入端口pout1,另一路发射信号经过所述第二移相器15后传输到正交耦合器18的隔离端口pout2。
69.在一个实施例中,所述发射天线12包括第一极化天线121和第二极化天线122,所述第一极化天线121和所述第二极化天线122的极化方向可以是任意的,但所述第一极化天线121和所述第二极化天线122的极化方向相差90
°
。
70.在一个实施例中,所述发射天线系统1还包括第三移相器16,用于控制所述正交耦合器18的输入端口pout1和隔离端口pout2的相位关系。
71.所述正交耦合器18,用于将所述功分网络17传输的两路发射信号进行耦合后分为两路耦合发射信号,其中一路耦合发射信号传输到所述第一极化天线121,另一路耦合发射信号传输到所述第二极化天线122;包括:
72.所述正交耦合器18,用于将所述功分网络17传输的两路发射信号进行耦合后分为两路耦合发射信号,其中一路耦合发射信号直接传输到所述第一极化天线121,另一路耦合发射信号经过第三移相器16后传输到所述第二极化天线122。
73.优选地,所述第一极化天线121为45
°
发射极化天线,所述第二极化天线122为
‑
45
°
发射极化天线。此时,所述正交耦合器18将所述功分网络17传输的两路发射信号进行耦合后分为两路耦合发射信号,其中一路耦合发射信号直接传输到45
°
发射极化天线,另一路耦合发射信号经过第三移相器16后传输到
‑
45
°
发射极化天线。
74.在一个实施例中,所述发射天线组12为双极化天线,所述双极化天线的天线间的极化方向相差90
°
。所述双极化天线实现的功能和作用与所述第一极化天线121(45
°
发射极化天线)和所述第二极化天线122(
‑
45
°
发射极化天线)的功能和作用类似,在此不再重复赘述。
75.在一个实施例中,所述第一移相器14和第二移相器15,分别用于控制所述正交耦合器18的输入端口pout1和隔离端口pout2的功率比。所述第三移相器16,用于控制所述正交耦合器18的输入端口pout1和隔离端口pout2的相位关系。
76.如图4所示,为正交耦合器的输入端口pout1与隔离端口pout2的相位相同时极化方向随功率比变化的示意图。
77.图4中,e1和e2为第一极化天线和第二极化天线的极化方向,eall为天线系统的极化方向。当输入端口pout1和隔离端口pout2的相位相同时,通过控制第一移相器和第二移相器以控制正交耦合器的输入端口pout1和隔离端口pout2的功率比从1:0到1:1变化时,发射天线系统的极化方向从45
°
极化逐渐变成90
°
极化,输入端口pout1与隔离端口pout2的功率比从1:1到0:1变化时,发射天线系统的极化方向从90
°
极化逐渐变成135
°
极化。也即,输入端口pout1与隔离端口pout2的功率比从1:0到0:1变化时,发射天线系统的极化方向从45
°
极化逐渐变成135
°
极化。
78.如图5所示,为正交耦合器的输入端口pout1与隔离端口pout2的相位相差180
°
时极化方向随功率比变化的示意图。
79.图5中,e1和e2为第一极化天线和第二极化天线的极化方向,eall为天线系统的极
化方向。当输入端口pout1和隔离端口pout2的相位相差180
°
时,通过控制第一移相器和第二移相器以控制正交耦合器的输入端口pout1和隔离端口pout2的功率比从1:0到1:1变化时,发射天线系统的极化方向从45
°
极化逐渐变成0
°
极化,输入端口pout1与隔离端口pout2的功率比从1:1到0:1变化时,发射天线系统的极化方向从0
°
极化逐渐变成
‑
45
°
极化。也即,输入端口pout1与隔离端口pout2的功率比从1:0到0:1变化时,发射天线系统的极化方向从45
°
极化逐渐变成
‑
45
°
极化。
80.如图6所示,为正交耦合器的输入端口pout1与隔离端口pout2等幅度、相位相差90
°
时天线极化模式。
81.图6中,e1和e2为第一极化天线和第二极化天线的极化方向,eall为天线系统的极化方向。当输入端口pout1和隔离端口pout2相位相差90
°
时,输入端口pout1与隔离端口pout2的功率比为1:1时,发射天线系统为左旋圆极化。
82.如图7所示,为正交耦合器的输入端口pout1与隔离端口pout2等幅度、相位相差270
°
时天线极化模式。
83.图7中,e1和e2为第一极化天线和第二极化天线的极化方向,eall为天线系统的极化方向。当输入端口pout1和隔离端口pout2相位相差270
°
时,输入端口pout1与隔离端口pout2的功率比为1:1时,发射天线系统为右旋圆极化。
84.在本实施例中,通过控制第一移相器和第二移相器以控制正交耦合器的输入端口pout1和隔离端口pout2的功率比,控制第三移相器以控制正交耦合器的输入端口pout1和隔离端口pout2的相位关系,从而使发射天线系统可以实现任意线极化、左圆极化和右圆极化工作模式,能够适应不同工作环境,毫米波雷达根据不同环境的变化选择相应的极化状态,并在毫米波雷达底噪异常抬升时,切换不同极化工作模式降低底噪,达成抗干扰的目的,大幅提升系统同频抗干扰水平,达到更优的同频抗干扰性能,提高目标检测精度的准确性。
85.基于同一构思,在一个实施例中,如图8所示,本发明提供一种车载毫米波雷达接收天线系统,所述接收天线系统2包括:毫米波雷达单片微波集成电路21,至少一组接收天线组22,至少一个功分网络27以及至少一个正交耦合器28;其中:
86.所述毫米波雷达单片微波集成电路21包括至少一条接收通道;一条接收通道、一个功分网络、一个正交耦合器、一组接收天线依次连接形成一条电磁信号接收链路。
87.所述接收天线组22包括第三极化天线221和第四极化天线222,所述第三极化天线221和所述第四极化天线222的极化方向相差90
°
,所述第三极化天线221和所述第四极化天线222分别接收一路空中电磁信号,分别传输给所述正交耦合器28。
88.所述正交耦合器28,与所述功分网络27连接,用于将来自接收天线组22接收的两路空中电磁信号进行耦合后分为两路接收信号,传输到所述功分网络27。
89.所述功分网络27,与所述毫米波雷达单片微波集成电路21连接,用于将正交耦合器28耦合的两路接收信号合并为一路接收信号后传输到所述毫米波雷达单片微波集成电路21的接收通道。
90.所述毫米波雷达单片微波集成电路21,用于通过所述接收通道接收来自所述功分网络27传输的接收信号。
91.在本实施例中,如果所述接收天线系统包括:包括一条接收通道的毫米波雷达单
片微波集成电路21、一组接收天线组22、一个功分网络27以及一个正交耦合器28,则所述接收通道、所述功分网络、所述正交耦合器、所述接收天线依次连接形成一条电磁信号接收链路。
92.如果所述接收天线系统包括:包括两条接收通道的毫米波雷达单片微波集成电路21、两组接收天线组22、两个功分网络27以及两个正交耦合器28,则第一条接收通道、第一个功分网络、第一个正交耦合器、第一组接收天线依次连接形成第一条电磁信号接收链路;第二条接收通道、第二个功分网络、第二个正交耦合器、第二组接收天线依次连接形成第二条电磁信号接收链路。即可以形成两条电磁信号接收链路。
93.以此类推,如果所述接收天线系统包括:包括n条接收通道的毫米波雷达单片微波集成电路21、n组接收天线组22、n个功分网络27以及n个正交耦合器28,则可以形成n条电磁信号接收链路。
94.在本实施例中,通过毫米波雷达单片微波集成电路21的一条接收通道、一个功分网络、一个正交耦合器、一组接收天线依次连接形成一条电磁信号接收链路,所述接收天线组22中极化方向相差90
°
的第三极化天线221和第四极化天线222分别接收一路空中电磁信号,分别传输给所述正交耦合器28,所述正交耦合器28将来自接收天线组22接收的两路空中电磁信号进行耦合后分为两路接收信号,传输到所述功分网络27,所述功分网络27将正交耦合器28耦合的两路接收信号合并为一路接收信号后传输到所述毫米波雷达单片微波集成电路21的接收通道,所述毫米波雷达单片微波集成电路21通过所述接收通道接收来自所述功分网络27传输的接收信号。从而使接收天线系统可以实现任意线极化、左圆极化和右圆极化工作模式,能够适应不同工作环境,毫米波雷达根据不同环境的变化选择相应的极化状态,大幅提升系统同频抗干扰水平,达到更优的同频抗干扰性能,提高目标检测精度的准确性。
95.在一个实施例中,所述正交耦合器28包括输入端口pout1和隔离端口pout2。所述接收天线系统2还包括第一移相器24和第二移相器25,所述第一移相器24和第二移相器25,分别用于控制所述正交耦合器28的输入端口pout1和隔离端口pout2的功率比。
96.在一个实施例中,所述接收天线组22包括第三极化天线221和第四极化天线222,所述第三极化天线221和所述第四极化天线222的极化方向可以是任意的,但所述第三极化天线221和所述第四极化天线222的极化方向相差90
°
。
97.在一个实施例中,所述接收天线系统2还包括第三移相器26,用于控制所述正交耦合器28的输入端口pout1和隔离端口pout2的相位关系。
98.所述正交耦合器28,用于将来自接收天线组22接收的两路空中电磁信号进行耦合后分为两路接收信号,传输到所述功分网络27;包括:
99.所述正交耦合器18将接收一路来自第三极化天线221接收的空中电磁信号,经耦合得到一路接收信号后传输到输入端口pout1,再将该路接收信经过所述第一移相器24传输到所述功分网络27,以及将接收另一路来自第四极化天线222接收且经过第三移相器26传输后的空中电磁信号,经耦合得到另一路接收信号后传输到隔离端口pout2,再将该路接收信号经过所述第二移相器25传输到所述功分网络27。
100.优选地,所述第三极化天线221为45
°
接收极化天线,所述第四极化天线222为
‑
45
°
接收极化天线。此时,所述正交耦合器28将接收一路来自45
°
接收极化天线接收的空中电磁
信号,经耦合得到一路接收信号后传输到输入端口pout1,再将该路接收信经过所述第一移相器24传输到所述功分网络27,以及将接收另一路来自
‑
45
°
接收极化天线接收且经过第三移相器26传输后的空中电磁信号,经耦合得到另一路接收信号后传输到隔离端口pout2,再将该路接收信号经过所述第二移相器25传输到所述功分网络27。
101.可选地,所述接收天线组22为双极化天线,所述双极化天线的天线间的极化方向相差90
°
。所述双极化天线实现的功能和作用与所述第三极化天线221(45
°
接收极化天线)和所述第四极化天线222(
‑
45
°
接收极化天线)的功能和作用类似,在此不再重复赘述。
102.在一个实施例中,所述功分网络27,与所述毫米波雷达单片微波集成电路21连接,用于将正交耦合器28耦合的两路接收信号合并为一路接收信号后传输到所述毫米波雷达单片微波集成电路21的接收通道;包括:
103.所述功分网络27将一路经正交耦合器28耦合到输入端口pout1后经过所述第一移相器24传输到所述功分网络27的接收信号与另一路经正交耦合器28耦合到隔离端口pout2后经过所述第二移相器25传输到所述功分网络27的接收信号合并为一路接收信号传输到所述毫米波雷达单片微波集成电路11的接收通道。
104.在本实施例中,所述接收天线系统2中的毫米波雷达单片微波集成电路21、功分网络27、正交耦合器28、第一移相器24、第二移相器25和第三移相器26与所述发射天线系统1中对应的毫米波雷达单片微波集成电路11、功分网络17、正交耦合器18、第一移相器14、第二移相器15和第三移相器16的结构与功能是相同。
105.进一步地,所述毫米波雷达单片微波集成电路21可以与上述毫米波雷达单片微波集成电路11是同一个毫米波雷达单片微波集成电路,所述毫米波雷达单片微波集成电路包括多个发射通道和多个接收通道。
106.此外,所述接收天线系统2中正交耦合器28的输入端口pout1与隔离端口pout2的相位相同时极化方向随功率比变化,与所述发射天线系统1中正交耦合器18的输入端口pout1与隔离端口pout2的相位相同时极化方向随功率比变化是类似的,可以参考图4至图7。
107.所述第一移相器24和第二移相器25,分别用于控制所述正交耦合器28的输入端口pout1和隔离端口pout2的功率比。所述第三移相器26,用于控制所述正交耦合器28的输入端口pout1和隔离端口pout2的相位关系。
108.如图4所示,为正交耦合器的输入端口pout1与隔离端口pout2的相位相同时极化方向随功率比变化的示意图。
109.图4中,e1和e2为第一极化天线和第二极化天线的极化方向,eall为天线系统的极化方向。当输入端口pout1和隔离端口pout2的相位相同时,通过控制第一移相器和第二移相器以控制正交耦合器的输入端口pout1和隔离端口pout2的功率比从1:0到1:1变化时,发射天线系统的极化方向从45
°
极化逐渐变成90
°
极化,输入端口pout1与隔离端口pout2的功率比从1:1到0:1变化时,发射天线系统的极化方向从90
°
极化逐渐变成135
°
极化。也即,输入端口pout1与隔离端口pout2的功率比从1:0到0:1变化时,发射天线系统的极化方向从45
°
极化逐渐变成135
°
极化。
110.如图5所示,为正交耦合器的输入端口pout1与隔离端口pout2的相位相差180
°
时极化方向随功率比变化的示意图。
111.图5中,e1和e2为第一极化天线和第二极化天线的极化方向,eall为天线系统的极化方向。当输入端口pout1和隔离端口pout2的相位相差180
°
时,通过控制第一移相器和第二移相器以控制正交耦合器的输入端口pout1和隔离端口pout2的功率比从1:0到1:1变化时,发射天线系统的极化方向从45
°
极化逐渐变成0
°
极化,输入端口pout1与隔离端口pout2的功率比从1:1到0:1变化时,发射天线系统的极化方向从0
°
极化逐渐变成
‑
45
°
极化。也即,输入端口pout1与隔离端口pout2的功率比从1:0到0:1变化时,发射天线系统的极化方向从45
°
极化逐渐变成
‑
45
°
极化。
112.如图6所示,为正交耦合器的输入端口pout1与隔离端口pout2等幅度、相位相差90
°
时天线极化模式。
113.图6中,e1和e2为第一极化天线和第二极化天线的极化方向,eall为天线系统的极化方向。当输入端口pout1和隔离端口pout2相位相差90
°
时,输入端口pout1与隔离端口pout2的功率比为1:1时,发射天线系统为左旋圆极化。
114.如图7所示,为正交耦合器的输入端口pout1与隔离端口pout2等幅度、相位相差270
°
时天线极化模式。
115.图7中,e1和e2为第一极化天线和第二极化天线的极化方向,eall为天线系统的极化方向。当输入端口pout1和隔离端口pout2相位相差270
°
时,输入端口pout1与隔离端口pout2的功率比为1:1时,发射天线系统为右旋圆极化。
116.在本实施例中,通过控制第一移相器和第二移相器以控制正交耦合器的输入端口pout1和隔离端口pout2的功率比,控制第三移相器以控制正交耦合器的输入端口pout1和隔离端口pout2的相位关系,从而使发射天线系统可以实现任意线极化、左圆极化和右圆极化工作模式,能够适应不同工作环境,毫米波雷达根据不同环境的变化选择相应的极化状态,并在毫米波雷达底噪异常抬升时,切换不同极化工作模式降低底噪,达成抗干扰的目的,大幅提升系统同频抗干扰水平,达到更优的同频抗干扰性能,提高目标检测精度的准确性。
117.基于同一构思,在一个实施例中,本发明提供一种车载毫米波雷达天线系统,所述车载毫米波雷达天线系统100包括如上述任一实施例所述的发射天线系统1和如上述任一实施例所述的接收天线系统2。
118.在本实施例中,所述发射天线系统1与上述任一实施例所述的发射天线系统1是一致,具体的结构与功能可以参考上述任一实施例所述的发射天线系统1,在此不再赘述。
119.在本实施例中,所述接收天线系统2与上述任一实施例所述的接收天线系统2是一致,具体的结构与功能可以参考上述任一实施例所述的接收天线系统2,在此不再赘述。
120.在本实施例中,所述车载毫米波雷达天线系统包括发射天线系统和接收天线系统。所述发射天线系统通过毫米波雷达单片微波集成电路的一条发射通道、一个功分网络、一个正交耦合器、一组发射天线依次连接形成一条电磁信号发射链路,所述毫米波雷达单片微波集成电路通过所述发射通道发射电磁信号传输到所述功分网络,所述功分网络将所述毫米波雷达单片微波集成电路的发射通道发射的电磁信号分为两路发射信号后传输到所述正交耦合器,所述正交耦合器将所述两路发射信号进行耦合后分为两路耦合发射信号,并分别传输到所述发射天线组中极化方向相差90
°
的第一极化天线第二极化天线。所述接收天线系统通过毫米波雷达单片微波集成电路的一条接收通道、一个功分网络、一个正
交耦合器、一组接收天线依次连接形成一条电磁信号接收链路,所述接收天线组中极化方向相差90
°
的第三极化天线和第四极化天线分别接收一路空中电磁信号,分别传输给所述正交耦合器,所述正交耦合器将来自接收天线组接收的两路空中电磁信号进行耦合后分为两路接收信号,传输到所述功分网络,所述功分网络将正交耦合器耦合的两路接收信号合并为一路接收信号后传输到所述毫米波雷达单片微波集成电路的接收通道,所述毫米波雷达单片微波集成电路通过所述接收通道接收来自所述功分网络传输的接收信号。从而使天线系统可以实现任意线极化、左圆极化和右圆极化工作模式,能够适应不同工作环境,毫米波雷达根据不同环境的变化选择相应的极化状态,大幅提升系统同频抗干扰水平,达到更优的同频抗干扰性能,提高目标检测精度的准确性。
121.需要说明的是,上述车载毫米波雷达天线系统实施例与上述发射天线系统和接收天线系统实施例属于同一构思,其具体实现过程详见上述发射天线系统和接收天线系统实施例,且上述发射天线系统和接收天线系统实施例中的技术特征在所述车载毫米波雷达天线系统实施例中均对应适用,重复之处不再赘述。
122.基于同一构思,在一个实施例中,本发明提供一种车载毫米波雷达,所述车载毫米波雷达包括如上述任一实施例所述的车载毫米波雷达天线系统100。
123.在本实施例中,所述车载毫米波雷达包括车载毫米波雷达天线系统,所述车载毫米波雷达天线系统包括发射天线系统和接收天线系统。所述发射天线系统通过毫米波雷达单片微波集成电路的一条发射通道、一个功分网络、一个正交耦合器、一组发射天线依次连接形成一条电磁信号发射链路,所述毫米波雷达单片微波集成电路通过所述发射通道发射电磁信号传输到所述功分网络,所述功分网络将所述毫米波雷达单片微波集成电路的发射通道发射的电磁信号分为两路发射信号后传输到所述正交耦合器,所述正交耦合器将所述两路发射信号进行耦合后分为两路耦合发射信号,并分别传输到所述发射天线组中极化方向相差90
°
的第一极化天线第二极化天线。所述接收天线系统通过毫米波雷达单片微波集成电路的一条接收通道、一个功分网络、一个正交耦合器、一组接收天线依次连接形成一条电磁信号接收链路,所述接收天线组中极化方向相差90
°
的第三极化天线和第四极化天线分别接收一路空中电磁信号,分别传输给所述正交耦合器,所述正交耦合器将来自接收天线组接收的两路空中电磁信号进行耦合后分为两路接收信号,传输到所述功分网络,所述功分网络将正交耦合器耦合的两路接收信号合并为一路接收信号后传输到所述毫米波雷达单片微波集成电路的接收通道,所述毫米波雷达单片微波集成电路通过所述接收通道接收来自所述功分网络传输的接收信号。从而使天线系统可以实现任意线极化、左圆极化和右圆极化工作模式,能够适应不同工作环境,毫米波雷达根据不同环境的变化选择相应的极化状态,大幅提升系统同频抗干扰水平,达到更优的同频抗干扰性能,提高目标检测精度的准确性。
124.需要说明的是,上述车载毫米波雷达实施例与上述车载毫米波雷达天线系统实施例属于同一构思,其具体实现过程详见车载毫米波雷达天线系统实施例,且车载毫米波雷达天线系统实施例中的技术特征在所述车载毫米波雷达实施例中均对应适用,重复之处不再赘述。
125.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而
且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
126.上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
127.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;在本发明的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本发明的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。