1.本发明涉及一种改进粒子滤波的室内定位方法,尤其是涉及一种不需要部署额外的基础设施,具有易扩展、低成本、米级定位精度、鲁棒性高等特点的改进粒子滤波的室内定位方法。
背景技术:
2.基于位置服务产业迅猛发展,其核心技术之一的室内定位技术得到了广泛的关注。目前室内定位技术众多,比如惯导系统、wifi、rfid、uwb、红外、地磁、地图匹配等。不同定位技术存在不同优缺点。惯导系统不依赖外部信息,能够连续实时的提供载体位置、姿态、速度等信息。但惯导系统存在航向漂移,累积误差不可避免,运行时间越长,累积误差越大。wifi定位技术使用现有的接入点,不需要部署额外基础设施,减少开发商和消费者经济负担。wifi定位技术主要分为两种模型,无线衰减模型和指纹匹配模型。无线衰减模型利用无线信号在室内环境中具有衰减特性,根据接收的信号强度估计行人在室内空间中的位置。使用无线衰减模型需要提前估计无线衰减模型参数,但室内环境复杂多变,固定的模型参数很容易增大行人位置误差。指纹匹配模型根据不同阶段指纹的相似性估计行人位置。指纹匹配模型分为离线阶段和在线阶段,离线阶段采集定位区域的指纹信号构建指纹位置数据库。在线阶段采集wifi信号,使用采集的信号搜索指纹库中最相似的指纹,其对应的位置作为指纹匹配位置。指纹匹配模型不需要提前设置参数,鲁棒性较高。
3.chunyang yu于2017年在《micromachines》第8期225页将内置mems传感器的智能手机和室内地图信息集成,提出一种基于免基础结构的低成本的室内导航方法。jian chen于2018年在《sensors》第18卷5期1458页提出了最小二乘算法估计行人位置。电子科技大学于2018年公开了一种融合wifi与pdr的室内定位方法专利(专利号cn201810915060.4),通过设置阈值使用最可信的定位结果作为终端定位结果。论文和专利提出许多创新性的算法来提高室内导航定位精度,但是惯性导航系统的累积误差以及wifi指纹误匹配仍然没有得到有效解决,定位精度和鲁棒性需要进一步研究。
技术实现要素:
4.针对上述问题,本发明的主要目的在于提供一种不需要部署额外的基础设施,具有易扩展、低成本、米级定位精度、鲁棒性高等特点的改进粒子滤波的室内定位方法。
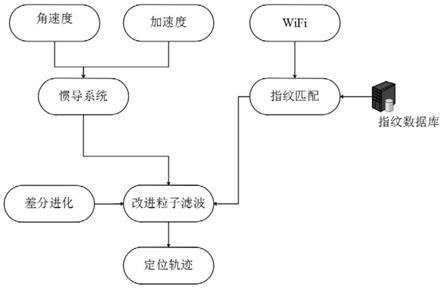
5.本发明是通过下述技术方案来解决上述技术问题的:一种改进粒子滤波的室内定位方法,所述改进粒子滤波的室内定位方法如下步骤:
6.步骤1:离线阶段数据采集:使用线段代替墙壁以及课桌,对墙壁和课桌进行简化,构建包含坐标位置地图;
7.步骤2:在离线阶段,结合定位区域参考点位置,构建离线阶段wifi指纹库;
8.步骤3:在在线阶段,智能手机的加速度计采集三轴加速度,陀螺仪采集三轴角速度;wifi传感器采集wifi信号;
9.步骤4:惯导系统模块基于加速度和角速度估计估计行人位置;
10.步骤5:wifi指纹匹配模块使用指纹匹配算法估计行人位置;
11.步骤6:改进粒子滤波融合惯导系统模块估计的行人位置和wifi指纹匹配模块估计行人位置。
12.在本发明的具体实施例子中,步骤1中:在线阶段数据采集具体包括:行人手持智能手机打开app软件后在定位区域按照正常步行速度行走,智能手机采集wifi信号。
13.在本发明的具体实施例子中,步骤2中:构建离线阶段wifi指纹库包括如下步骤:
14.步骤201:在定位区域划分网格,使用激光测距仪测量网格参考点的二维空间坐标位置;
15.步骤202:测绘人员在网格参考点位置手持智能手机采集wifi信号;
16.步骤203:构建wifi指纹位置键值对数据库,如下表示:
[0017][0018]
式中k代表在第k个参考点收集指纹信号,n代表第n个无线接入点,(x
k y
k
)代表在第k个参考点位置。
[0019]
在本发明的具体实施例子中,步骤3在在线阶段,智能手机的加速度计采集三轴加速度,陀螺仪采集三轴角速度;wifi传感器采集wifi信号的具体包括如下步骤:
[0020]
第一步:打开getsensordata手机软件;
[0021]
第二步:点击start saving a log file按钮;
[0022]
第三步:采集加速度、角速度以及wifi信号。
[0023]
在本发明的具体实施例子中,步骤4中“惯导系统模块”的具体步骤包括:
[0024]
step1:使用角速度估计智能手机姿态信息;主要技术包括直接余弦矩阵法、四元数法和欧拉角法;直接余弦矩阵法如下计算:
[0025][0026]
式中[q1,q2,q3,q4]代表四元数;
[0027]
基于直接余弦矩阵法的行人方向如下计算
[0028][0029]
step2:当加速度计采集加速度后,使用倒立摆模型计算行人步长,计算如下
[0030][0031]
式中sl代表步长,l代表智能手机距离地面高度,h代表垂直位移;
[0032]
step3:行人航位推算使用前一时刻[x
i
‑
1 y
i
‑1]
t
、步长以及方向计算当前时刻位置:
[0033][0034]
在本发明的具体实施例子中,步骤5中“wifi指纹匹配”具体包括如下步骤:
[0035]
step1:采集的指纹信号长度为s1和s2,计算两个指纹对应点之间的距离
[0036]
d(i,j)=(s1(i)
‑
s2(j))2ꢀꢀꢀ
(5)
[0037]
step2:使用递归算法计算指纹距离
[0038]
d(i,j)=d(i,j) min([d(i
‑
1,j),d(i
‑
1,j
‑
1),d(i,j
‑
1)])
ꢀꢀꢀ
(6)
[0039]
step3:最小d对应的位置作为wifi指纹匹配结果。
[0040]
在本发明的具体实施例子中,步骤6中“改进粒子滤波”具体包括:
[0041]
step1:改进粒子滤波的状态方程
[0042][0043]
式中sl
k
和h
k
分别代表第k时刻步长和方向,[x
k y
k
]
t
代表第k时刻位置,δsl和δh分别代表步长变化量和方向变化量;[w
sl,k
‑
1 w
h,k
‑
1 w
x,k
‑
1 w
y,k
‑1]
t
分别代表步长噪声、方向噪声、行人位置噪声;
[0044]
step2:改进粒子滤波器的观测方程:
[0045][0046]
其中[x
pdr y
pdr
]
t
和[x
wifi y
wifi
]
t
分别代表航位推算定位结果和wifi指纹匹配结果,[v
x v
y
]
t
代表对应的观测噪声;
[0047]
step3:传统粒子滤波算法的主要缺陷是粒子贫乏问题,即随着滤波迭代次数增加,大多数粒子权重变得越来越小,只有少数粒子具有较大权重;为了减轻粒子贫乏问题,引入差分进化算法;差分进化包括三个步骤:变异、交叉和选择;
[0048]
step3.1:变异:变异操作的目的是使个体产生差异,保持种群的多样性,提高种群的适应性;变异操作如下:
[0049][0050]
其中i、i1和i2分别代表第i个、第i1个和第i2个粒子,f代表变异比例因子,其值反映了变异程度;
[0051]
step3.2:交叉:交叉操作的目的是通过变异前的个体和变异后的个体进行交叉,得到一个新的个体交叉操作如下:
[0052]
[0053]
式中cr是提前设定的阈值,rand是随机产生的阈值;
[0054]
step3.3:选择:选择操作的目的是根据适应度选择适应性强的个体作为下一代,选择操作如下:
[0055][0056]
式中f()表示适应度函数;
[0057]
step4:重采样技术:其主要思想是对粒子和其相应的权值表示的概率密度函数重新进行采样,通过增加较大粒子权重和减少较小粒子权重来实现,最后估计行人位置。
[0058]
本发明的积极进步效果在于:本发明提供的改进粒子滤波的室内定位方法有如下优点:本发明提供的室内定位方法不需要部署额外的基础设施,具有易扩展、低成本、米级定位精度、鲁棒性高等特点。
附图说明
[0059]
图1为本发明的基于改进粒子滤波的室内定位方法流程图。
[0060]
图2为本发明中的建筑物楼层平面的示意图及真实轨迹。
[0061]
图3为本发明改进粒子滤波定位结果。
具体实施方式
[0062]
下面结合附图给出本发明较佳实施例,以详细说明本发明的技术方案。
[0063]
图1为本发明的基于改进粒子滤波的室内定位方法流程图,图2为本发明中的建筑物楼层平面的示意图及真实轨迹,图3为本发明改进粒子滤波定位结果,如图1
‑
3所示:本发明提供的一种改进粒子滤波的室内定位方法,所述改进粒子滤波的室内定位方法如下步骤:
[0064]
步骤1:离线阶段数据采集:使用线段代替墙壁以及课桌,对墙壁和课桌进行简化,构建包含坐标位置地图;
[0065]
步骤2:在离线阶段,结合定位区域参考点位置,构建离线阶段wifi指纹库;
[0066]
步骤3:在在线阶段,智能手机的加速度计采集三轴加速度,陀螺仪采集三轴角速度;wifi传感器采集wifi信号;
[0067]
步骤4:惯导系统模块基于加速度和角速度估计估计行人位置;
[0068]
步骤5:wifi指纹匹配模块使用指纹匹配算法估计行人位置;
[0069]
步骤6:改进粒子滤波融合惯导系统模块估计的行人位置和wifi指纹匹配模块估计行人位置。
[0070]
步骤1中:离线阶段数据采集包括:行人手持智能手机打开app软件后在定位区域按照正常步行速度行走,智能手机采集wifi信号。
[0071]
步骤2中:构建离线阶段wifi指纹库包括如下步骤:
[0072]
步骤201:在定位区域划分网格,使用激光测距仪测量网格参考点的二维空间坐标位置;
[0073]
步骤202:测绘人员在网格参考点位置手持智能手机采集wifi信号;
[0074]
步骤203:构建wifi指纹位置键值对数据库,如下表示:
[0075][0076]
式中k代表在第k个参考点收集指纹信号,n代表第n个无线接入点,(x
k y
k
)代表在第k个参考点位置。
[0077]
步骤3在在线阶段,智能手机的加速度计采集三轴加速度,陀螺仪采集三轴角速度;wifi传感器采集wifi信号的具体包括如下步骤:
[0078]
第一步:打开getsensordata手机软件;
[0079]
第二步:点击start saving a log file按钮;
[0080]
第三步:采集加速度、角速度以及wifi信号。
[0081]
根据墙壁以及障碍物在空间中的具体坐标位置,对建筑物进行结构化,建筑物的结构化由线段组成具体包括如下步骤:
[0082]
第一步:对建筑物墙壁进行简化,用线段代替墙壁、障碍物等实际物体;
[0083]
第二步:对课桌进行简化,使用正方形代替实际的课桌;
[0084]
第三步:使用激光测距仪测量墙壁、课桌在空间中的坐标位置。
[0085]
步骤4中“惯导系统模块”的具体步骤包括:
[0086]
step1:使用角速度估计智能手机姿态信息。主要技术包括直接余弦矩阵法、四元数法和欧拉角法。直接余弦矩阵法如下计算:
[0087][0088]
式中[q1,q2,q3,q4]代表四元数。
[0089]
基于直接余弦矩阵法的行人方向如下计算:
[0090][0091]
step2:当加速度计采集加速度后,使用倒立摆模型计算行人步长,计算如下
[0092][0093]
式中sl代表步长,l代表智能手机距离地面高度,h代表垂直位移。
[0094]
step3:行人航位推算使用前一时刻[x
i
‑
1 y
i
‑1]
t
、步长以及方向计算当前时刻位置
[0095]
[0096]
步骤5中“wifi指纹匹配”具体包括如下步骤:
[0097]
step1:采集的指纹信号长度为s1和s2,计算两个指纹对应点之间的距离
[0098]
d(i,j)=(s1(i)
‑
s2(j))2ꢀꢀꢀ
(5)
[0099]
step2:使用递归算法计算指纹距离
[0100]
d(i,j)=d(i,j) min([d(i
‑
1,j),d(i
‑
1,j
‑
1),d(i,j
‑
1)])
ꢀꢀꢀ
(6)
[0101]
step3:最小d对应的位置作为wifi指纹匹配结果。
[0102]
步骤6中“改进粒子滤波”具体包括:
[0103]
step1:改进粒子滤波的状态方程:
[0104][0105]
式中sl
k
和h
k
分别代表第k时刻步长和方向,[x
k y
k
]
t
代表第k时刻位置,δsl和δh分别代表步长变化量和方向变化量。[w
sl,k
‑
1 w
h,k
‑
1 w
x,k
‑
1 w
y,k
‑1]
t
分别代表步长噪声、方向噪声、行人位置噪声。
[0106]
step2:改进粒子滤波器的观测方程:
[0107][0108]
其中[x
pdr y
pdr
]
t
和[x
wifi y
wifi
]
t
分别代表航位推算定位结果和wifi指纹匹配结果,[v
x v
y
]
t
代表对应的观测噪声。
[0109]
step3:传统粒子滤波算法的主要缺陷是粒子贫乏问题,即随着滤波迭代次数增加,大多数粒子权重变得越来越小,只有少数粒子具有较大权重。为了减轻粒子贫乏问题,引入差分进化算法。差分进化包括三个步骤:变异、交叉和选择。
[0110]
step3.1:变异:变异操作的目的是使个体产生差异,保持种群的多样性,提高种群的适应性,变异操作如下:
[0111][0112]
其中i、i1和i2分别代表第i个、第i1个和第i2个粒子,f代表变异比例因子,其值反映了变异程度。
[0113]
step3.2:交叉。交叉操作的目的是通过变异前的个体和变异后的个体进行交叉,得到一个新的个体交叉操作如下
[0114][0115]
式中cr是提前设定的阈值,rand是随机产生的阈值。
[0116]
step3.3:选择:选择操作的目的是根据适应度选择适应性强的个体作为下一代,选择操作如下:
[0117][0118]
式中f()表示适应度函数。
[0119]
step4:重采样技术:其主要思想是对粒子和其相应的权值表示的概率密度函数重
新进行采样,通过增加较大粒子权重和减少较小粒子权重来实现;最后估计行人位置。
[0120]
本发明提供了一种改进粒子滤波的室内定位方法,涉及惯性传感器和wifi的室内定位技术领域,解决的技术问题是提供一种免基础设施的米级室内定位方法。该室内定位方法包括惯导系统模块、wifi匹配模块和改进粒子滤波融合模块;惯导系统模块包括行人方向估计、步长估计、行人航位推算;wifi匹配模块包括离线阶段的wifi指纹库构建和在线阶段的wifi指纹匹配;改进粒子滤波融合模块引入差分进化算法,提高粒子权重,增强粒子多样性,缓解粒子贫乏问题。本发明的室内定位方法不需要部署额外的基础设施,具有易扩展、低成本、米级定位精度、鲁棒性高等特点。
[0121]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内,本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。