1.本发明涉及起重机械领域,特别是涉及一种自动调平吊具及自动调平方法。
背景技术:
2.在工程技术领域中,起吊作业应用广泛。一些对起吊精准程度有较高要求的作业场合如结构件起吊装配、起吊拼接、模具装配等,依靠普通起吊作业机械直接起吊往往难以达到需要的定位精确程度。现有的吊具基本只能实现对起吊点的转换功能,主要目的是保证起吊稳定性,但对于起吊物位姿难以控制,因而不适用于精准起吊应用场合。
3.cn 108609475 a采用星形伸缩模块实现起吊点的水平移动调节,只能适应起吊物起吊点的变化,本质上是对起吊点进行转换,只能提高起吊作业的稳定性,无法对起吊物本身起吊位姿作调整。cn 103047522 a采用两个起吊点,可分别调节两个起吊点纵向高度,但只是通过螺杆螺母的啮合运动进行调整,调节时起吊点不能有负载,且需要手动进行调节,不能实现自动化,操作相当不便,且只适合轻型负载起吊。
4.有鉴于在目前精准起吊作业中对起吊物位姿实时精准控制的难题,本发明提出了一种自动调平吊具及调平方法。吊具采用4吊点,配合4组伸缩液压缸对吊点进行调节,且具备吊点载荷检测、自动调平功能,提高了起吊作业精准程度。
技术实现要素:
5.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是提供一种自动调平吊具及自动调平方法,解决目前精准起吊作业对起吊物位姿控制的难题。
6.为实现上述技术目的,本发明提出如下技术方案:
7.一种自动调平吊具,包括吊具组件、调平控制系统和远程控制终端,所述吊具组件包括卸扣、拉力传感器、平衡梁和设备舱,所述平衡梁的四角上设有起吊环;所述调平控制系统包括调平电控系统、调平液压系统、调平执行元件、伺服换向阀、液压泵和溢流阀,所述调平液压系统包括4组伺服换向阀,所述调平执行元件包括4组液压缸;所述调平电控系统包括驱动/信号采集模块、姿态感知模块、运算单元和无线传输模块,所述驱动/信号采集模块控制所述4组伺服换向阀,并实时采集所述4组液压缸分别所处的行程位置;姿态感知模块实时监测平衡梁的倾斜状态,并将监测到的姿态数据发送至运算单元和驱动/信号采集模块;
8.该自动调平吊具具备手动调平模式和自动调平模式:
9.手动调平模式下,能够在远程控制终端分别控制所述4组伺服换向阀进而分别调节所述4组液压缸的伸缩状态进而调平起吊物;
10.自动调平模式下,能够在远程控制终端通过一键操作,向所述调平控制系统发送自动调平命令,所述调平电控系统中的运算单元根据姿态感知模块发送的姿态数据、液压缸当前的行程位置数据进行比较计算,得到4组伺服换向阀的控制逻辑,并由驱动/信号采集模块根据所述控制逻辑控制4组换向阀进而控制调平执行元件调平起吊物。
11.其中,所述驱动/信号采集模块包括位移传感器,所述液压缸上设有位移传感器,用于实时监测液压缸伸缩行程量,并将数据传送至驱动/信号采集模块;所述液压缸一端与拉力传感器通过上端卸扣连接,拉力传感器另一端铰接在平衡梁的四个角上;所述液压缸末端设有吊环,所述吊环通过下端卸扣连接起吊物。
12.其中,所述平衡梁由型材焊接而成,所述平衡梁上部四个角落分别设有所述起吊环,并在所述平衡梁上且位于所述起吊环的对侧设有与拉力传感器连接的铰接座,所述拉力传感器另一端通过该铰接座铰接在平衡梁的四个角上;所述设备舱安装在平衡梁上,内部设有所述调平控制系统;所述拉力传感器测量4个起吊点分别受到的载荷和起吊总载荷。
13.其中,所述调平控制系统还包括动力电池,所述调平液压系统还包括液压泵、溢流阀及相关液压管路,所述液压泵为调平液压系统提供液压动力,所述4组伺服换向阀分别对应控制所述4组液压缸的伸缩和锁止状态,所述溢流阀保证液压系统处于设定的工作压力状态。其中,所述无线传输模块用于和远程控制终端通信,接收远程控制终端发来的操作命令及向远程终端发送吊具当前的状态信息。
14.其中,所述远程控制终端能够实时显示起吊物当前位姿数据、4个起吊点分别的载荷值、起吊总载荷、4组液压缸实时行程位置数据。
15.其中,所述姿态感知模块主要包括1个2轴陀螺仪,所述姿态数据包括起吊物的位姿倾角。
16.本发明还提出如下技术方案:
17.一种用于上述自动调平系统的自动调平方法,该方法用于所述自动调平模式,其特征在于,该方法包括以下步骤:
18.第一步:远程控制终端向无线传输模块发送自动调平命令;
19.第二步:无线传输模块将命令发送给运算单元,运算单元首先获取姿态感知模块的当前位姿数据、4组液压缸的行程位置数据,并且通过计算得到4组液压缸末端的相对起伏状态即起吊物的位姿状态;
20.第三步:根据起吊物的位姿状态分别控制4组伺服换向阀的阀位状态进行调整;
21.第四步:将实时更新的位姿状态、液压缸行程位置数据、伺服换向阀阀位状态信息通过无线传输模块发送给控制终端实时显示;
22.第五步:重复执行第二步至第四步,直至起吊物水平程度达到系统设定值;
23.第六步:锁定所述伺服换向阀的当前状态,向远程控制终端发送已调平信号,远程终端显示已调平。
24.本发明与现有技术相比的优点在于:
25.(1)吊具具备起吊位姿调整功能,相比传统吊具具有更高的起吊精度,在精准起吊应用场合降低了起吊作业难度,提高了起吊作业效率。
26.(2)吊具具备自动调平电控液压系统,起吊后也能实现远程起吊调平功能,避免了传统吊具需要卸载后再调整的麻烦。
27.(3)吊具集成了自动控制系统,通过平衡程序实现起吊快速平衡,且能实时显示当前起吊物位姿状态、监测起吊点载荷大小,使起吊作业更加数字化,提高了起吊作业安全性。
附图说明
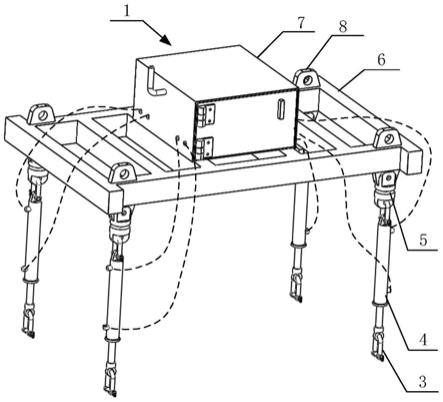
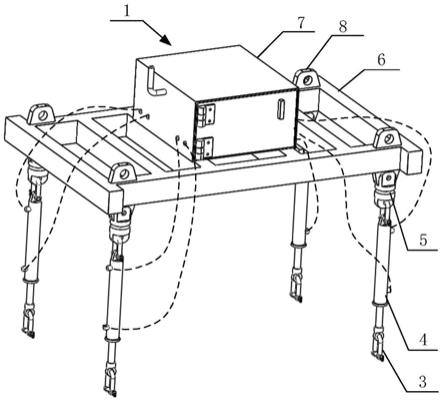
28.图1是本发明的吊具组件结构示意图;
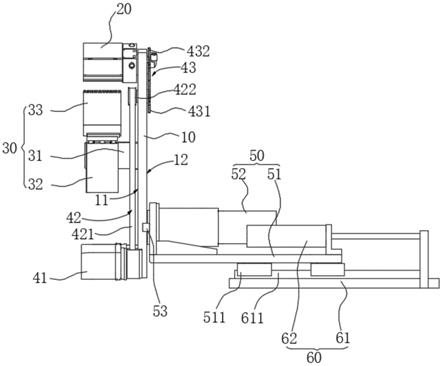
29.图2是本发明的调平控制系统原理图。
具体实施方式
30.下面结合附图和实施例对本发明进行详细说明,需要注意的是,在本发明的描述中,指示的方位或位置关系为基于附图所示的方位或位置关系,不表示发明必须具有特定的方位、以特定的方式构造和操作等,不可理解为对本发明的限制条件。
31.如图1、图2所示实施例,一种自动调平吊具,包括吊具组件1、调平控制系统2和远程控制终端。吊具组件1由卸扣3、拉力传感器5、平衡梁6和设备舱7组成。
32.如图2、图1所示,所述调平控制系统2包括调平电控系统9、调平液压系统14、调平执行元件10,所述调平液压系统14包括4组伺服换向阀11,所述调平执行元件10包括4组液压缸4。
33.液压缸4一端设有下端卸扣3,用于和起吊物连接,另一端通过上端卸扣3和拉力传感器5连接,拉力传感器5再安装在平衡梁6上。
34.吊具组件1上的液压缸4为双向的液压缸4,且设有用于检测行程的位移传感器,调平控制系统2可随时检测4组液压缸的行程位置,每组液压缸4都有两根油管提供液压动力输入。液压缸4上连接的压力传感5可实时检测每个吊点的载荷值,并将载荷值数据发送至调平控制系统2中的驱动/信号采集模块,进一步经过运算处理发送至远程控制终端处理显示。平衡梁6设有4个起吊点,4组液压缸4和拉力传感器5分别位于4组起吊点正下方位置处。在平衡梁6上方中间位置安装设备舱7,内部设有调平控制系统2。
35.调平控制系统2还包括动力电池等,调平液压系统14主要由4组伺服换向阀11、液压泵12、溢流阀13及相关液压管路等组成,液压泵12为调平液压系统14提供液压动力,4组伺服换向阀11分别对应控制4个液压缸4的伸缩和锁止状态,溢流阀13保证液压系统处于设定的工作压力状态。
36.调平电控系统9由驱动/信号采集模块、姿态感知模块、运算单元和无线传输模块组成,驱动/信号采集模块用于采集4组液压缸4的行程位置信息和控制4路伺服换向阀11的动作;姿态感知模块主要由1个2轴陀螺仪组成,用于感知平衡梁6的当前平衡状态;运算单元实时接收姿态感知模块、驱动/信号采集模块发来的平衡梁6的位姿信息、液压缸4的行程位置信息,通过计算处理得到当前起吊物位姿状态对起吊物进行调整。
37.吊具有手动调平和自动调平模式。在手动调平模式下,远程控制终端实时显示起吊物当前位姿倾角、液压缸4行程位置、起吊点载荷值、实时调平状态,操作人员根据起吊物当前位姿倾角分别对4组液压缸行程位置进行调节,使位姿倾角减小至调平状态。
38.在自动调平模式下,通过以下控制步骤实现起吊物自动调平。
39.第一步:远程控制终端向无线传输模块发送自动调平命令;
40.第二步:无线传输模块将命令发送给运算单元,运算单元开始执行自动调平程序,首先获取姿态感知模块的当前位姿数据、4路液压缸的行程位置数据,通过计算得到4路液压缸末端的相对起伏状态即起吊物的位姿状态;
41.第三步:根据起吊物的位姿状态分别控制4路伺服换向阀11的阀位状态进行调整,
控制目标是使起吊物位姿倾角减小。
42.第四步:将实时更新的位姿状态、液压缸4行程信息、伺服换向阀11阀位信息、起吊物水平程度通过无线传输模块发送给控制终端实时显示;
43.第五步:重复执行第二步至第四步,直至起吊物水平程度达到系统设定值;
44.第六步:锁定当前伺服换向阀11,向远程控制终端发送已调平信号,远程终端显示已调平。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。