技术特征:
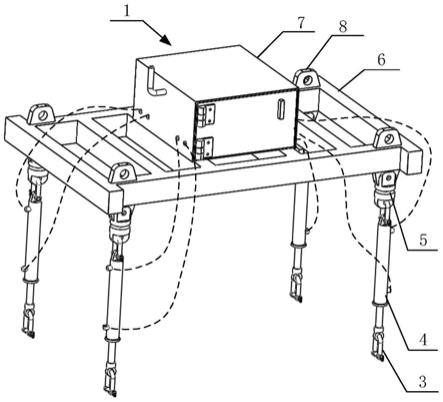
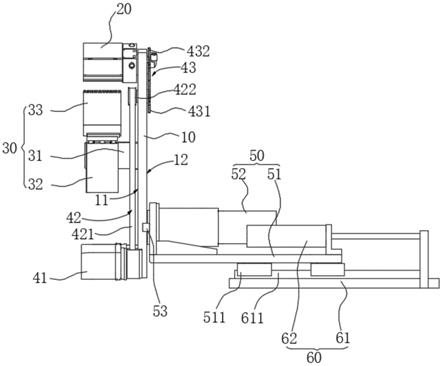
1.一种自动调平吊具,包括吊具组件(1)、调平控制系统(2)和远程控制终端,其特征在于:所述吊具组件(1)包括卸扣(3)、拉力传感器(5)、平衡梁(6)和设备舱(7),所述平衡梁(6)的四角上设有起吊环(8);所述调平控制系统(2)包括调平电控系统(9)、调平液压系统(14)、调平执行元件(10),所述调平液压系统(14)包括4组伺服换向阀(11),所述调平执行元件(10)包括4组液压缸(4);所述调平电控系统(9)包括驱动/信号采集模块、姿态感知模块、运算单元和无线传输模块,所述驱动/信号采集模块控制所述4组伺服换向阀,并实时采集所述4组液压缸(4)分别所处的行程位置;姿态感知模块实时监测平衡梁(6)的倾斜状态,并将感测的姿态数据发送至运算单元和驱动/信号采集模块;该自动调平吊具具备手动调平模式和自动调平模式:手动调平模式下,能够在远程控制终端分别控制所述4组伺服换向阀(11)进而分别调节所述4组液压缸(4)的伸缩状态进而调平起吊物;自动调平模式下,能够在远程控制终端通过一键操作,向所述调平控制系统(2)发送自动调平命令,所述调平电控系统(9)中的运算单元根据姿态感知模块发送的实时位姿数据、液压缸(4)当前的行程位置数据进行比较计算,得到4组伺服换向阀(11)的控制逻辑,并由驱动/信号采集模块根据所述控制逻辑控制4组换向阀(11)进而控制所述4组液压缸(4)调平起吊物。2.如权利要求1所述的一种自动调平吊具,其特征在于:所述液压缸上设有所述位移传感器,用于实时监测液压缸伸缩行程量,并将数据传送至所述驱动/信号采集模块;所述液压缸一端与拉力传感器(5)通过卸扣(3)连接,拉力传感器(5)另一端铰接在平衡梁(6)的四个角上;所述液压缸(4)末端设有吊环,所述吊环通过下端卸扣(3)连接起吊物。3.如权利要求2所述的一种自动调平吊具,其特征在于:所述平衡梁(6)由型材焊接而成,所述平衡梁(6)上部四个角落分别设有所述起吊环(8),并在所述平衡梁(6)上且位于所述起吊环(8)的对侧设有与拉力传感器(5)连接的铰接座,所述拉力传感器(5)另一端通过该铰接座铰接在平衡梁(6)的四个角上;所述设备舱(7)安装在平衡梁(6)上,内部设有所述调平控制系统(2);所述拉力传感器用于测量4个起吊点分别受到的载荷值和起吊总载荷。4.如权利要求3所述的一种自动调平吊具,其特征在于:所述调平控制系统(2)还包括动力电池;所述调平液压系统(14)还包括液压泵(12)、溢流阀(13)及相关液压管路,所述液压泵(12)为调平液压系统(14)提供液压动力,所述4组伺服换向阀(11)分别对应控制所述4组液压缸(4)的伸缩和锁止状态,所述溢流阀(13)保证液压系统处于设定的工作压力状态。5.如权利要求4所述的一种自动调平吊具,其特征在于:所述无线传输模块用于和远程控制终端通信,接收远程控制终端发来的操作命令及向远程终端发送吊具当前的状态信息。6.如权利要求5所述的一种自动调平吊具,其特征在于:
所述远程控制终端能够实时显示起吊物当前位姿数据、4个起吊点分别的载荷值、起吊总载荷值以及4组液压缸(4)实时行程位置数据。7.如权利要求1所述的一种自动调平吊具,其特征在于:所述姿态感知模块主要包括1个2轴陀螺仪,所述位姿数据包括起吊物的位姿倾角。8.一种用于权利要求1
‑
7任一项所述的自动调平吊具的自动调平方法,该方法用于所述自动调平模式,其特征在于,该方法包括以下步骤:第一步:远程控制终端向无线传输模块发送自动调平命令;第二步:无线传输模块将命令发送给运算单元,运算单元首先获取姿态感知模块的当前位姿数据、4组液压缸的行程位置数据,并且通过计算得到4组液压缸末端的相对起伏状态即起吊物的位姿状态;第三步:根据起吊物的位姿状态分别控制4组伺服换向阀(11)的阀位状态进行调整;第四步:将实时更新的位姿数据、液压缸(4)行程位置数据、伺服换向阀(11)阀位状态信息通过无线传输模块发送给控制终端实时显示;第五步:重复执行第二步至第四步,直至起吊物水平程度达到系统设定值;第六步:锁定所述伺服换向阀(11)的当前状态,向远程控制终端发送已调平信号,远程终端显示起吊物已调平。9.如权利要求8所述的自动调平方法,其特征在于:所述位姿数据包括起吊物在水平方向的位姿倾角。
技术总结
本发明公开了一种自动调平吊具及自动调平方法,包括吊具组件和调平控制系统。吊具组件通过4组液压缸实现起吊物调平,4组液压缸上分别有拉力传感器,实时记录每个起吊点的载荷值及起吊总载荷值。调平控制系统包括调平电控系统和调平液压系统,调平电控系统采集起吊物当前位姿、液压缸行程信息,并执行调平程序控制伺服换向阀动作,同时与远程控制终端通信。调平液压系统包括4路独立的伺服换向阀及液压缸、液压泵、溢流阀和液压管路,通过控制液压缸伸缩量调平起吊物。本发明采用闭环伺服控制,在精准起吊作业中能快速准确地调整起吊物位姿,降低了起吊作业难度,提高了起吊作业效率和精准度。和精准度。和精准度。
技术研发人员:梁平华 冯常 张志刚 窦普 陈志波 廖礼斌
受保护的技术使用者:中国科学院光电技术研究所
技术研发日:2021.08.16
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。