1.本发明涉及一种用于鱼缸的潜入式(submerged,浸没式、水下)观察单元,其中,悬挂的观察单元可以通过表面浮标(surface buoy,水面浮标)上的卷扬机绞盘移动,而表面浮标又可以沿在浮环上两点之间跨水面伸展的主跨移动。更具体地,来自绞盘的节点缆绳是抗扭转的,使得缆绳围绕其竖向轴线的旋转例如由于绞盘在方位角平面中的旋转,将控制观察单元到期望的方位角。通过观察单元沿主跨的可能的间接移动以及单元可以升高和降低且可控制其方位角的事实,实现了观察单元可以以非常灵活的方式和简单的设备移动到缸的所有部分。整个系统易于安装、使用且随后拆卸以在其他缸中使用。
背景技术:
2.用于观察鱼缸中的鱼的许多技术方案在本领域中是已知的。其中一些在专利文献中有所描述:
3.申请人持有用于鱼缸的挪威专利no 331345“device and method for eliminating parasites on fish(用于消除鱼上寄生虫的装置和方法)”。这是通过与控制单元通信的摄像头来实现的,为了破坏寄生虫,该控制单元与光源进行通信,该光源被布置成发射脉冲、激光脉冲。控制单元在限定的坐标系内控制用于光学识别的系统,并被布置成确定位置和实时更新位置的坐标,上述位置表现出对于位于鱼皮上的寄生虫而言典型的对比度差异,并且当确定位置的坐标与光源在鱼上的打击位置的坐标重合时,触发来自光源的光脉冲。这样,鱼虱被杀死或伤害。
4.no 300401描述了一种用于鱼缸中的摄像头、探测器或测量设备的定位装置。该设备悬挂在两条或更多条绳索上,上述绳索经由缸的上周缘延伸至绞盘。该设备使用共同工作并被安装在浮环上的绞盘进行定位。
5.no 330863描述了一种用于记录鱼缸中鱼的运动的装置和方法,其中摄像头壳体悬挂在可以通过丝线和滑轮在水面上升高和降低的缆绳上,并且其中在缸的边缘上设置有绞盘。
6.no 337305公开了一种计算鱼的大小的系统和方法。其公开一种用于将观察系统升高和降低到缸中的绞盘。刚性杆悬挂在绳索上,绳索从缸的栏杆延伸到缸中心的浮标。
7.cn 108059102描述了一种带有密封发动机的水下绞盘。
8.gb 1329494描述了一种水下钟形件,在该形件中具有机动化的绞盘。绞盘被布置成沿着来自表面浮标的丝线升高和降低其自身。在水下钟形件的下方,有丝线和锚。
9.ep 1871658b1,标题为“inspection system for underwater structures and having a positioning device(用于水下结构和具有定位装置的检测系统)”,示出了一种用于观察装备的定位的装置,其中该装备可以通过连续可调整的竖向伸缩杆上下移动到不同的水深,并通过轨道和由滚轮引导的托架之间的耦接进行水平地移动。观察单元可以至少绕水平空间轴线(rm)转动并且与光学摄像头轴线(ka)形成直角。
10.现有技术的问题
11.上述公开内容并没有解决涉及水下观察设备的安全的方位角布置的问题。no 300401需要若干绞盘并且它们以协同的方式被控制。no 330863需要三个方位角式分布的摄像头绕其竖向轴线在若干方向上进行观察。这使设备和能量需求以及设备重量增至三倍,而且总成本也增至三倍。no 337305意在将已知的条纹图案投射到经过摄像头的鱼上以计算鱼的大小。其缺点是对观察单元方位角的控制较差。此外,还有潜入式壳体出现不期望的运动以及在空气中延伸的丝线上冰积聚的风险。gb 1329494缺乏控制方位角的方法,并且还存在水进入潜入式壳体中的绞盘及其发动机的风险。这种风险随着壳体所在深度的增大而增大。
技术实现要素:
12.本发明,如主权利要求所限定的,是一种用于鱼缸的潜入式观察单元,其中
13.观察单元悬挂于来自表面浮标中的卷扬机绞盘的节点缆绳,
14.节点缆绳是抗扭转的,
15.节点缆绳在其上端部处卷绕在具有水平卷筒轴线的卷扬机绞盘上,
16.观察单元被布置成是机动化的并且绕竖向轴线进行方位角式旋转,
17.表面浮标被布置成是机动化的并沿表面缆绳的主跨移动,其中主跨被布置成在鱼缸的浮环上方伸展。
18.本发明的另外的有益特征在从属权利要求中被限定。
附图说明
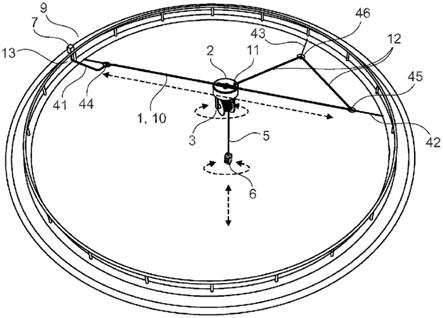
19.图1是鱼缸的立体图,该鱼缸具有带有栏杆的浮环和悬挂于表面浮标的观察单元,该表面浮标沿着表面缆绳的主跨移动,以便形成跨该环伸展的弦(当缸是圆形时为弦,或者当缸是矩形时为跨矩形的线)。表面缆绳的第二端部被固定附接并返回到设置有绞盘的表面浮标中。表面缆绳的第一端部定位到缸边缘的控制舱。
20.图2例示了一种表面浮标,其设置有绞盘并被布置成沿着表面缆绳的主跨移动并且具有观察单元,该观察单元被悬挂于来自卷扬机绞盘的抗扭转的绞盘缆绳。在本发明的该实施方式中,卷扬机绞盘可以绕竖向轴线旋转,使得抗扭转的节点缆绳控制观察单元的定向,即方位角方向。
21.图3例示了被布置成沿着表面缆绳1移动的表面浮标2。表面缆绳的一个端部从附接到缸环的第二或第三吊索(stagline)返回,并进入浮标中。表面浮标被布置成沿表面缆绳的主跨移动。驱动轮是接近的并与主跨接合,以便将表面浮标重新定位到主跨上的期望的位置。
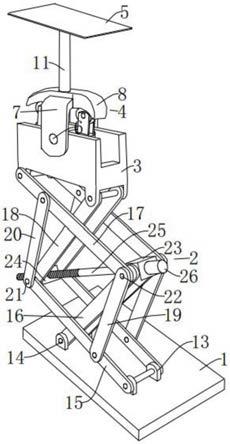
22.图4例示了表面缆绳上的表面浮标,其中驱动轮21、22是分开的并且不与主跨接合,使得轮可以从主跨分离。
23.图5例示了从下方看到的节点缆绳5和具有绞盘3的浮标2的立体图。图中还示出了轴承32和转动装置34。
24.图6从与图5相同的视角例示了浮标,该浮标具有卷扬机绞盘、节点缆绳5和悬挂的、方位角式受控的观察单元6。与图5类似,图中还示出了轴承33和转动装置35。
具体实施方式
25.图1示出了用于鱼缸的潜入式观察单元6,其中
26.观察单元悬挂于来自表面浮标2中的卷扬机绞盘3的节点缆绳5,
27.节点缆绳5是抗扭转的,
28.节点缆绳5在其上端部处卷绕在具有水平卷筒轴线的卷扬机绞盘3上,
29.观察单元6被布置成是机动化的并且绕竖向轴线进行方位角式旋转,
30.表面浮标2被布置成是机动化的并且沿表面缆绳1的主跨10移动,其中主跨10被布置成跨鱼缸的浮环9伸展。
31.表面缆绳1如此表示是因为它被布置成漂浮或近似漂浮在缸9中的水面处。因此,缆绳经受微弱的浮力,或者在水中是平衡的,或者受到微弱的负向浮力的影响。在图1和图2中,示出了本发明的一实施方式,其中设置了导轨24以将主跨10朝向驱动轮引导(图4中所示)。以此方式,表面缆绳1上的张力有利地较小并且缆绳可以被制造得相当灵活,以便简化缆绳的管理以及通过套钩和吊索简化在确定的位置处表面缆绳的附接和固定。
32.本发明的一个实质性优点是表面浮标2和缆绳1有限地暴露于冰积聚,因为它们位于水面处并且表面浮标2被布置为可使其沿表面缆绳1的主跨10向后和向前移动,该表面缆绳不延伸穿过缸(浮环)9的第一和第二附接点之间的空气。在相同的背景下,表面浮标2漂浮在水面处,并且主要是纵向力(和漂移力)可以被缸9每一端部处的附件吸收。因此,表面缆绳1(在水中时重量为零或非常小)仅在附接点,环9中第一和第二点处受到较大的张力影响。
33.本发明的一个实施方式示出于图1中。观察单元6悬挂在抗扭转的节点缆绳5中并且其中机动化的观察单元6被布置成绕竖向轴线进行方位角式旋转的该实施方式的优点是,观察单元6以稳定和可控的方位角方向被悬挂在抗扭转的节点缆绳5中。
34.众所周知的是将观察单元6悬挂在不抗扭转的缆绳中,并为观察单元6提供推进器,以便使其在期望方向上旋转。该过程不稳定、难以控制、设置复杂并且经常引起绕竖向轴线的不期望的悬摆式旋转运动。
35.至少有两种不同的方式使观察单元6可绕其竖向轴线旋动:在上部,卷扬机绞盘3处;或者在下部,在观察单元6的壳体(图6中所示)处。在一个实施方式中,观察单元6被布置成是机动化的并绕竖向轴线进行方位角式旋转,并且卷扬机绞盘3被机动化并被安装在轴承(图5中所示)上,该轴承具有竖向轴线、被设置在表面浮标2中,并且观察单元6的壳体相对于节点缆绳5的下端部被紧密地密封。因此,当卷扬机绞盘3在轴承处进行方位角式旋转时,包括具有方位角式被固定的壳体的抗扭转节点缆绳5的整个卷扬机绞盘3作为一单元旋转,并且观察单元6可以在已知和期望的方位角方向——即环绕的期望点——上观察。壳体61中的其他机构和/或电子设备可以控制观察单元6在竖向平面中的倾斜度。该实施方式的显著优点在于,卷扬机绞盘3本身是能够方位角式旋转的,以及在于,观察单元6的壳体被刚性地且密封地安装在节点缆绳5的最下部段处。参照图2,该实施方式带来的显著优点是水面处的静水压力较低。此外,在电流/信号转动装置(如图5所示)中用于电流/信号传输的节点缆绳5的上端部51与卷绕在绞盘3的卷筒上的节点缆绳5的上端部51之间的连接变得更容易实现有效的压力密封,当与位于壳体中的具有信号/电流转动装置(如图6所示)的轴承(也如图6所示)处的节点缆绳5的下端部52的防水电流/信号传输相比时。在后者中,静水压
力显著地高于使其更容易暴露于水的靠近水面的情况。
36.在图2中所示的替代实施方式中,其中方位角机构被布置得较低,观察单元6布置成是机动化的并且绕竖向轴线进行方位角式旋转,并且卷扬机绞盘3被固定且观察单元6的壳体被安装在节点缆绳5的下端部52处的具有竖向轴线的轴承上。然后,除了在节点缆绳5的下端部51中具有电流/信号传输的图6的防水转动装置之外,将提供发动机,该发动机被布置成使节点缆绳5上的壳体旋转。
37.在一个实施方式中(如图1所示),表面缆绳1的主跨10通过两条弹性吊索41、42在浮环9上的第一点和第二点之间伸展。第一弹性吊索41在第一点附接到浮环9并在主跨10的第一端部处设置有第一套钩44,第二弹性吊索42在第二点附接到浮环9并在主跨10的第二端部处设置有第二套钩45。
38.在一个实施方式中,第二套钩45被布置成可沿表面缆绳1移动,使得主跨10的长度可以根据主跨10所跨的结构是圆形还是矩形而被调整成期望的长度。表面缆绳1的主跨10然后作为弦伸展最长至圆形缸的直径,或作为跨矩形缸的期望的线。
39.在一个实施方式中,表面缆绳1的第一端部13将延伸超过第一套钩44并被引入和连接在缸环9的控制舱7中,见图1。
40.仍然参照图1和图2,在一个实施方式中,表面缆绳1除了主跨10之外还包括在缆绳端部11处的连续延伸部分12,其延伸超过主跨10的第二端部和第二套钩45并回到表面浮标2中。这种布置的主要益处是表面浮标2沿表面缆绳1的主跨10移动,以及电能的供应、电信号的传输和可能的光连接都通过相同的缆绳进行。
41.在这种类型的系统中可能的是:表面浮标2固定地附接到表面缆绳1的第二端部11并且在所述浮标2沿着表面缆绳1移动时经由相同的表面缆绳1从控制舱7接收能量和信号。
42.我们表示为“第一端部”的表面缆绳1的部段的长度可以由操作员在缸处调整成控制舱7和第一套钩44之间的期望长度,使得合适的长度构成延伸部段12并且浮标2可以沿着整个主跨10自由移动。因此,在一个实施方式中的第一和第二套钩44、45可沿着表面缆绳1滑动以界定主跨10,并且一旦它们在表面缆绳1上的位置被确定,就被布置成是固定的。
43.在一个实施方式中,连续延伸部分12被伸展至浮环9上第一点和第二点之间的第三点,使得第三弹性吊索43在第一点附接到浮环9并在延伸部分12的大约中点处设置有第三套钩46,使得包括主跨10和延伸部分12的整个表面缆绳1在鱼缸内被伸展,见图1。
44.在此实施方式中,在缸内伸展的单个表面缆绳1需要:使构成表面浮标2沿其移动的主跨10的弦进行伸展的同一缆绳,以及表面浮标2经由表面缆绳的第二端部11具有电流和光学接触。此外,不需要电池供电或类似的脆弱的方案来确保能量供应,且光或电信号传输可以从表面浮标完成。
45.所呈现的观察单元6易于移动到不同的鱼缸。无需在缸边缘永久地安装设备。代替地,第一、第二和第三吊索41
‑
43在期望位置附接到缸边缘。控制舱7保持在平台上并且表面浮标2被发动优选地通过卷扬机,并与主跨10上的驱动轮41、42接合。来自表面缆绳1和表面浮标2的所有力都经由弹性地连接到缸边缘的套钩44
‑
46进行传递。这使得设备较易于在位点之间移动,并且仅通过套钩和吊索来微调缸中的浮标位置变得可能。此外,由于表面浮标2的大部分是潜入式的,冰积聚不会造成任何问题。鉴于表面缆绳1沿水面伸展,因此对于绞盘3、节点缆绳5和观察单元6也是如此。
46.在本发明的实施方式中,从表面缆绳1的另一端部11到浮标2的壳体中,提供了:控制舱7和机动轮之间的能量和信号连接(如图4所示),以便沿着主跨10向后和向前移动表面浮标2;以及用于绞盘3的机动化和卷扬机绞盘3绕其竖向轴线的旋转的方位角控制的机动化操作的能量和信号连接。
47.因此,再次参照图1,图1中所示的控制舱7经由表面缆绳1为缸提供能量和控制信号,用于以下:
48.‑
将表面浮标2沿着主跨10移动到期望位置,该主跨沿着缸的水面伸展,
49.‑
操作卷扬机绞盘3以便它可以将观察单元6升高和降低到期望深度或将其一直向上绞起,
50.‑
将观察单元6旋转到期望的方位角方向,
51.‑
经由节点缆绳5的能量和控制信号,用以操作观察单元6中的设备和光源,
52.‑
经由节点缆绳5的能量和控制信号,用以在竖向平面中定向设备和光源。
53.关于图3和图4,在实施方式中,表面浮标2包括被布置成与表面缆绳1的主跨10接合的机动化驱动轮21、22,并且其中,驱动轮21、22被布置成将表面浮标2沿主跨10移动到主跨10上的期望位置。驱动轮可被布置为邻接主跨10的两个驱动带。主跨10上的驱动轮的夹握在一定程度上稳定了表面浮标的方位角方向,特别是由于它们被布置为驱动带。
54.在一实施方式中,驱动轮21、22中的至少一个驱动轮被布置成能够相对于另一驱动轮21、22移动并且能够从主跨10分离。
55.在一实施方式中,表面浮标2设置有至少一个导轨24(也在图3和图4中示出),该导轨被布置成将主跨10朝向驱动轮21、22引导并且被布置成实现表面浮标2相对于主跨10的方向稳定性。在一个实施方式中,导轨24延伸穿过表面浮标2的顶部部段,优选地恰在水面之上或在水面处。在所示实施方式中,表面浮标在竖向方向上主要是柱形的并且具有相当平坦的顶部。所示实施方式将在很大程度上避免在导轨24中和在驱动轮21、22之间的冰积聚,因为它们将经常被波浪冲刷,并且如果冰积聚即将发生,可使表面浮标2沿着主跨10缓慢地移动。
56.在图6的实施方式中,观察单元6包括设置在壳体61中或设置在壳体处的以下光学单元65、66中的至少一者:
57.摄像头(图6中不可见),被布置成记录鱼的图像,
58.超声波探头65,被布置成记录鱼的图像或确定鱼的位置,
59.激光器66,被布置成执行以下中的至少一项:
60.照射鱼,
61.检测和确定鱼的位置,
62.检测和确定有机体在鱼上的位置,以及
63.照射并杀死鱼上的有机体,
64.光源(图6中不可见),被布置成照亮鱼,例如led光源,
65.水文测量仪器(图6中不可见),诸如盐度计、氧饱和度计、声学传感器、生物传感器等。
66.在一实施方式中,至少一个光学单元65、66在竖向平面和水平平面中是可控的。
67.通过将这种设备安装在观察单元6中,可以控制观察单元到缸中的期望位置,并可
以到该位置处的期望深度,并可以在期望方向上指引传感器,以便从获得的期望位置充分访问缸的整个容积。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。