1.本发明涉及一种铸造件自动化顶断机构,属于机械自动化领域。
背景技术:
2.消失模铸造原理是是通过可熔的塑料或泡沫等定型模,然后通过定型沙等将模架固定,向内部浇铸造件的熔融金属水,由于高温,塑料或定型模被烧尽,而铸造出一模多件的铸造件,但是铸造时由于都是整体连接的,也就是说存在铸造件与模架整体“焊”在一起,也就是浇口处需要顶断,换句话说,就是铸造件需要一个一个的从模架上敲下来。
3.对于一个模架而言,一次可成型数百件产品,由于金属构造,重量较重,搬运极不方便。多数情况下,浇铸成型后,工人们通过外力敲击的方式将铸造件从模架上的浇口处断开,该方式耗费人力,而且工作环境恶劣,主要表现在一般工人采取用锤子敲击撞掉浇口断裂,劳动强度大,同时噪音大,效率低,甚至造成断口不理想,导致合格率低。
技术实现要素:
4.本发明为解决上述问题,提供了一种铸造件自动化顶断机构,本自动化设备为了更广泛的应用至不同的消失模铸造件或者不同的铸造工艺而需要断浇口的情况。
5.为达此目的,本发明采用以下技术方案:一种铸造件自动化顶断机构,包括
6.载料结构,该结构位于输料轨道下方的第一轨道上,用于放置并固定从输料轨道输送的铸造件料架;
7.顶断动力结构,该结构位于载料结构后方,固定于第一轨道上,与所述载料结构连接,用于驱动载料结构在第一轨道上滑动;
8.顶紧结构,该结构位于载料结构前方,包括感应系统和顶紧滑块,所述感应系统用于定位及监测物料;
9.当所述感应系统监测到铸造件时,所述顶紧滑块顶紧该铸造件,所述顶断动力结构推动所述载料结构在所述第一轨道上朝向顶紧结构一端滑动以使铸造件从料架上被顶断。
10.进一步地,所述顶紧滑块包括第一前驱顶板和第二前驱顶板,所述第二前驱顶板通过固定导柱与固定块连接,所述固定块与位于第三滑轨上的第三滑块连接;
11.所述第一前驱顶板与所述第二前驱顶板通过直线轴承连接,所述直线轴承通过轴承套固定设于第二前驱顶板,该直线轴承的导向轴一端与所述第一前驱顶板连接,且,在该导向轴与所述第一前驱顶板之间套设有回复弹簧;
12.所述感应系统包括第一光电应器、第二光电感应器及若干个用于定位物料所处某列的定位感应器;
13.所述导向轴穿出轴承套的另一端与所述固定块之间设有一定距离的间隙,在该间隙的底端两侧设有一对第一光电感应器;
14.当所述顶断动力结构驱动所述载料结构在所述第一滑道上滑动至接触所述第一
前驱顶板,第一前驱顶板受力压缩回复弹簧,并,将所述导向轴作直线运动而使该导向轴向间隙发生位移以遮挡两侧第一光电感应器,该结果表示该列有物料,并发出信号执行顶断命令。
15.进一步地,所述第二光电感应器位于料架与滑动块两侧的固定支架上;
16.当所述顶断动力结构驱动所述载料结构在所述第一滑道上滑动至未接触所述第一前驱顶板时,所述物料遮挡两侧第二光电感应器,该结果表示某定位列无物料,并发出信号执行所述顶紧结构重新定位列。
17.进一步地,所述第三滑块后侧设有用于与定位感应器配合的触控挡片。
18.进一步地,所述第三滑轨固定于固定横梁,在固定横梁两端设有限位感应器。
19.进一步地,所述载料结构包括四个载料平台,该四个载料平台与铸造件料架横杆前后端预留悬挂位相对应,该载料平台设有锁紧结构,该锁紧结构用于将铸造件锁定于载料平台上。
20.进一步地,每个所述载料平台还包括固定架、位于固定架一侧的载料支脚、用于驱动所述固定架的前后移动的第一驱动气缸和用于驱动所述载料支脚上下移动的第二驱动气缸。
21.进一步地,所述锁紧结构包括与固定架连接的连接块和位于固定块一侧的锁紧螺杆,该锁紧螺杆与所述载料平台保持一定间隔齐平,所述连接块上设有腰形孔。
22.进一步地,所述固定架通过连接第一滑块与第一滑轨连接,所述第一滑轨位于所述固定架两侧面,所述载料支脚位于第二滑块上,所述第二滑块位于第二滑轨上,所述第二驱动气缸通过链条与第二滑块连接,所述第二滑轨位于固定架另一侧面上。
23.进一步地,所述动力驱动结构包括伺服电机和与之连接的伺服推杆。
24.本发明的有益效果为:
25.1、本发明提供的一种铸造件自动化顶断机构,通过设置载料结构,顶断动力结构及顶紧结构,实现大型铸造件的高效安全自动化顶断工作,解决了人力环境恶劣,粉尘大效率低的问题。
26.2、本发明提供的一种铸造件自动化顶断机构,通过设置第一前驱顶板、第二前驱顶板、第一光电感应器及第二光电感应器等结构特征,实现对物料检测控制,顶断过程有效得到控制,防止了无料时动力驱动机构无效持续推动,撞击横梁的安全性风险。
27.3、通过载料结构设置,一方面通过对载料支脚设置前后和上下的第一驱动气缸和第二驱气缸,能够有效的固定物料,给的安全的顶断操作带来极大的稳定性。
附图说明
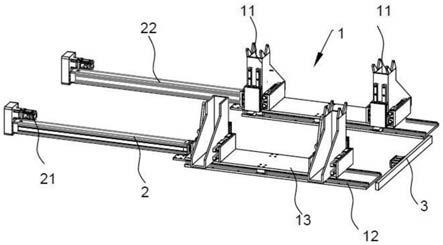
28.图1是本发明的一种铸造件自动化顶断机构整体结构图;
29.图2是本发明顶紧结构整体示意图;
30.图3是本发明顶紧结构局部放大图;
31.图4是本发明载料结构示意图;
32.图5是本发明载料结构俯视图。
33.图中:1
‑
载料结构
34.11
‑
载料平台;12
‑
第一轨道;13
‑
滑动撑板;
35.111
‑
锁紧结构;1111
‑
锁紧螺杆;1112
‑
固定块;112
‑
固定架;113
‑
载料支脚;114
‑
第一滑块;115
‑
第一滑轨;116
‑
第一驱动气缸;117
‑
第二驱动气缸;118
‑
第二滑块;
36.119
‑
第二滑轨;
[0037]2‑
动力驱动结构;21
‑
伺服电机;22
‑
伺服推杆;
[0038]3‑
顶紧结构
[0039]
31
‑
感应系统;311
‑
第一光电感应器;312
‑
第二光电感应器;313
‑
定位感应器;
[0040]
314
‑
限位感应器;
[0041]
32
‑
顶紧滑块;321
‑
第一前驱顶板;322
‑
第二前驱顶板;323
‑
固定导柱;324
‑
固定块;325
‑
第三滑块;326
‑
第三滑轨;327
‑
触控挡片;328
‑
回复弹簧;320
‑
直线轴承;3201
‑
轴承套;3202
‑
导向轴;
[0042]
33
‑
固定横梁;34
‑
固定支架。
具体实施方式
[0043]
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
[0044]
一种铸造件自动化顶断机构,包括载料结构1,该结构位于输料轨道下方的第一轨道12上,用于放置并固定从输料轨道输送的铸造件料架;顶断动力结构2,该结构位于载料结构后方,与载料机结构1连接,用于驱动载料结机构在第一轨道12上滑动;顶紧结构3,该结构位于载料结构3前方,包括感应系统31和顶紧滑块32,感应系统31用于定位及监测物料;
[0045]
当感应系统监测到铸造件时,顶紧滑块32顶紧该铸造件,顶断动力结构2推动载料结构1在第一轨道12上朝向顶紧结构1一端滑动以使铸造件从料架上被顶断。
[0046]
具体地,顶紧滑块32包括第一前驱顶板321和第二前驱顶板322,第二前驱顶板322通过固定导柱323与固定块324连接,固定块324与位于第三滑轨326上的第三滑块325连接;
[0047]
第一前驱顶板321与第二前驱顶板322通过直线轴承320连接,直线轴承320通过轴承套3201固定设于第二前驱顶板322,该直线轴承320的导向轴3202一端与第一前驱顶板321连接,且,在该导向轴3202与第一前驱顶板321之间套设有回复弹簧328;
[0048]
感应系统31包括第一光电应器311、第二光电感应器312及若干个用于定位物料所处某列的定位感应器313;
[0049]
导向轴3202穿出轴承套3201的另一端与固定块324之间设有一定距离的间隙,在该间隙的底端两侧设有一对第一光电感应器311;
[0050]
当顶断动力结构2驱动载料结构1在第一滑道12上滑动至接触第一前驱顶板321,第一前驱顶321板受力压缩回复弹簧,并,将导向轴3202作直线运动而使该导向轴3202向间隙发生位移以遮挡两侧第一光电感应器311,该结果表示该列有物料,并发出信号执行顶断命令。换句话说,为了确认是否存在,我们利用光电开关光线通断来确定,第一前驱顶板使受物料前移动作,使导向轴向间隙移动,导致相互关联的光电开关,光线被阻挡,而发生信号指令,确认有料,动力机构启动,铸造件被顶断。
[0051]
上述中,在物料存在时,执行顶断指令,为了更加安全,在出现料架上缺料时,设置了第二光电感应器312,该第二光电感应器312位于料架与滑动块两侧的固定支架34上,当
顶断动力结构2驱动载料结构1在第一滑道12上滑动至未接触第一前驱顶板321时,物料遮挡两侧第二光电感应器312,该结果表示某定位列无物料,并发出信号执行顶紧结构重新定位列。具体地,定位列的方法是,在第三滑块325上设置了触控挡片327,用于滑动到定位感应器314位置触碰到感应开关后停止,并且在两端也设置限位光电传感器,防止第三滑块超限滑动。
[0052]
更具体地,第三滑块与一链条(图中未示出)连接,链条与第三驱动气缸连接(图中未示出)。更具体地,第三滑轨固定于固定横梁上,固定横梁固定于两侧的固定支架上。
[0053]
具体地,载料结构1包括四个载料平台11,该四个载料平台11与铸造件料架横杆前后端预留悬挂位相对应,该载料平台11设有锁紧结构111,该锁紧结构111用于将铸造件锁定于载料平台上。
[0054]
更具体地,每个载料平台11还包括固定架112、位于固定架112一侧的载料支脚113、用于驱动固定架112带动载料支脚113前后移动的第一驱动气缸116和用于驱动载料支脚113上下移动的第二驱动气缸117。更具体地,固定架112通过连接第一滑块114与第一滑轨115连接,第一滑轨115位于固定架112两侧面,载料支脚113位于第二滑块118上,第二滑块118位于第二滑轨119上,第二滑轨119位于固定架112另一侧面,第二驱动气缸117通过链条与第二滑块118连接。
[0055]
具体地,锁紧结构111包括与固定架连接的连接块110和位于连接块一侧的锁紧螺杆1111,该锁紧螺杆1111与载料支脚3保持一定间隔齐平。由于连接块锁定在滑动板上,需要横向滑动一定距离才能够与载料支脚一致被推出,因此在连接板上开设了腰形槽1113,用于避开锁紧螺丝。
[0056]
具体地,动力驱动结构包括伺服电机和与之连接的伺服推杆。
[0057]
该实施方式的顶断机构适用于利用消失模工艺制作的炉篦条的自动化顶断作业。
[0058]
以上结合具体实施例描述了本发明的技术原理。这些描述只是为了解释本发明的原理,而不能以任何方式解释为对本发明保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。