技术特征:
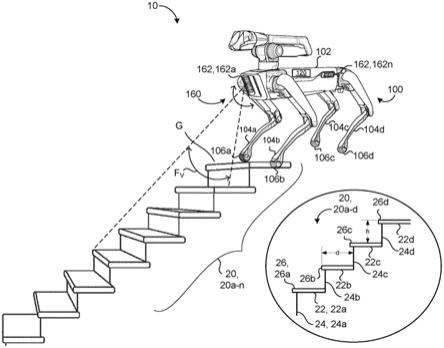
1.一种方法(500),包括:在数据处理硬件(172)处接收关于机器人(100)在具有楼梯(20)的环境(10)中操纵的图像数据(164),机器人(100)包括两条或多条腿(104);在机器人(100)穿越楼梯(20)之前:对于每个楼梯(20),由数据处理硬件(172)基于接收到的图像数据(164)确定对应的步伐区域(220),步伐区域(220)为机器人(100)的对应摆动腿(104
sw
)的远端识别对应楼梯(20)上的安全放置区域;和由数据处理硬件(172)将机器人(100)的重量分布向机器人(100)的前部移位;和当机器人(100)穿越楼梯(20)时,对于每个楼梯(20),通过数据处理硬件(172)将机器人(100)的相应摆动腿(104
sw
)的远端(106)移动到目标步伐位置,该目标步伐位置在楼梯的相应步伐区域(220)内。2.根据权利要求1所述的方法(500),还包括在机器人(100)穿越楼梯(20)之前,由数据处理硬件(172)识别每个楼梯(20)的相应碰撞区域(230),该碰撞区域(230)对应于当机器人(100)穿越楼梯(20)时机器人(100)的腿(104)应该避开的相应楼梯(20)的区域。3.根据权利要求2所述的方法(500),还包括,当机器人(100)穿越楼梯(20)时,由数据处理硬件(172)调节机器人(100)的质心(com)相对于楼梯(20)的表面的身体高度和机器人(100)围绕沿着机器人(100)的身体(102)限定的纵向轴线的俯仰,身体高度和俯仰的调节基于为每个楼梯(20)识别的相应碰撞区域(230)。4.根据权利要求2所述的方法(500),还包括,当机器人(100)穿越楼梯(20)时:由数据处理硬件(172)识别机器人(100)的每条腿(104)的相应腿运动学;和由数据处理硬件(172)调节机器人(100)的质心(com)相对于楼梯(20)的表面的身体高度和机器人(100)围绕沿着机器人(100)的身体(102)限定的纵向轴线的俯仰,身体高度和俯仰的调节基于为每个楼梯(20)识别的相应碰撞区域(230)和机器人(100)的每个腿(104)的相应腿运动学。5.根据权利要求1
‑
4中任一项所述的方法(500),还包括,当将相应摆动腿(104
sw
)的远端(106)移动到目标步伐位置时:由数据处理硬件(172)检测机器人(100)的相应摆动腿(104
sw
)的远端(106)接触目标步伐位置处的相应楼梯(20);和基于该检测,由数据处理硬件(172)将机器人(100)的相应摆动腿(104
sw
)分类为站立腿(104
st
)。6.根据权利要求1
‑
5中任一项所述的方法(500),还包括,当将相应摆动腿(104
sw
)的远端(106)移动到目标步伐位置时:由数据处理硬件(172)检测机器人(100)的后腿(104
t
)的膝关节(j
k
)接触机器人(100)的身体(102)后面的物体;和基于该检测,由数据处理硬件(172)将后腿(104
t
)的膝关节(j
k
)向前移动到机器人(100)的身体(102)下方。7.根据权利要求1
‑
6中任一项所述的方法(500),还包括,当将相应摆动腿(104
sw
)的远端(106)移动到目标步伐位置时:由数据处理硬件(172)检测机器人(100)的相应摆动腿(104
sw
)和机器人(100)的对侧站
立腿(104
c
)之间的冲击(310);和基于检测到的冲击(310),由数据处理硬件(172)将机器人(100)的相应摆动腿(104
sw
)的远端(106)从机器人(100)的对侧站立腿(104
c
)移开到调整后的步伐位置,调整后的步伐位置在楼梯的相应步伐区域(220)内并相对于目标步伐位置移位。8.根据权利要求1
‑
7中任一项所述的方法(500),还包括,当将相应摆动腿(104
sw
)的远端(106)移动到目标步伐位置时:由数据处理硬件(172)检测导致机器人(100)不稳定的机器人(100)的相应摆动腿(104
sw
)的绊倒条件;和基于检测到的绊倒条件,由数据处理硬件(172)抬升相应摆动腿的远端(106)。9.根据权利要求1
‑
8中任一项所述的方法(500),还包括,在机器人(100)穿越楼梯(20)之前,由数据处理硬件(172)选择用于以固定节奏穿越楼梯(20)的运动控制器(120),所述固定节奏基于为每个楼梯(20)确定的相应步伐区域(220)。10.根据权利要求1
‑
9中任一项所述的方法(500),还包括,当将机器人(100)的相应摆动腿(104
sw
)的远端(106)移动到目标步伐位置时,由数据处理硬件(172)将站立腿(104
st
)的远端(106)定位到后楼梯(20),后楼梯(20)位于以下位置之一:当机器人(100)正在上楼梯(20)时在与相应摆动腿(104
sw
)的目标步伐位置相关联的楼梯(20)下方;或者当机器人(100)正在下楼梯(20)时在与相应摆动腿(104
sw
)的目标步伐位置相关联的楼梯(20)上方。11.根据权利要求10所述的方法(500),其中,机器人(100)的相应摆动腿(104
sw
)的远端(106)的运动和机器人(100)的站立腿(104
st
)的远端(106)的运动以固定的节奏发生。12.根据权利要求1
‑
11中任一项所述的方法(500),其中,为每个楼梯(20)确定的相应步伐区域(220)与相应楼梯(20)的踏板部分(22)相关联。13.一种机器人(100),包括:身体(102);两条或更多条腿(104),该两条或更多条腿联接到身体(102)并被配置成穿越具有楼梯(20)的环境(10);和与两条或更多条腿(104)通信的运动控制器(120),该运动控制器(120)包括数据处理硬件(172)和与该数据处理硬件(172)通信的存储器硬件(174),该存储器硬件(174)存储指令,该指令当在数据处理硬件(172)上执行时使得数据处理硬件(172)执行包括以下的操作:接收关于机器人(100)在具有楼梯(20)的环境(10)中操纵的图像数据(164);在机器人(100)穿越楼梯(20)之前:对于每个楼梯(20),基于接收到的图像数据(164)确定相应的步伐区域(220),该步伐区域(220)为机器人(100)的相应摆动腿(104
sw
)的远端(106)识别相应楼梯(20)上的安全放置区域;和朝向机器人(100)的前部移位机器人(100)的重量分布;和当机器人(100)穿越楼梯(20)时,对于每个楼梯(20),将机器人(100)的相应摆动腿(104
sw
)的远端(106)移动到目标步伐位置,该目标步伐位置在楼梯的相应步伐区域(220)
内。14.根据权利要求13所述的机器人(100),其中,所述操作还包括,在机器人(100)穿越楼梯(20)之前,识别每个楼梯(20)的相应碰撞区域(230),该碰撞区域(230)对应于当机器人(100)穿越楼梯(20)时机器人(100)的腿(104)应该避开的相应楼梯(20)的区域。15.根据权利要求14所述的机器人(100),其中,所述操作还包括,当所述机器人(100)穿越所述楼梯(20)时,调节所述机器人(100)的质心(com)相对于所述楼梯(20)的表面的身体高度和所述机器人(100)围绕沿着所述机器人(100)的身体(102)限定的纵向轴线的俯仰,身体高度和俯仰的调节基于为每个楼梯(20)识别的相应碰撞区域(230)。16.根据权利要求14所述的机器人(100),其中,所述操作还包括,当机器人(100)穿越楼梯(20)时:为机器人(100)的每条腿(104)识别相应的腿运动学;和调节机器人(100)的质心(com)相对于楼梯(20)的表面的身体高度和机器人(100)围绕沿着机器人(100)的身体(102)限定的纵向轴线的俯仰,身体高度和俯仰的调节、身体高度和俯仰的调节基于为每个楼梯(20)识别的相应碰撞区域(230)和机器人(100)的每个腿(104)的相应腿运动学。17.根据权利要求13
‑
16中任一项所述的机器人(100),其中,所述操作还包括,在将相应摆动腿(104
sw
)的远端(106)移动到目标步伐位置的同时:检测机器人(100)的相应摆动腿(104
sw
)的远端(106)在目标步伐位置处接触相应的楼梯(20);和基于该检测,将机器人(100)的相应摆动腿(104
sw
)分类为站立腿(104
st
)。18.根据权利要求13
‑
17中任一项所述的机器人(100),其中,所述操作还包括,在将相应摆动腿(104
sw
)的远端(106)移动到目标步伐位置的同时:检测机器人(100)的后腿(104
t
)的膝关节(j
k
)接触机器人(100)的身体(102)后面的物体;和基于该检测,将后腿(104
t
)的膝关节(j
k
)向前移动到在机器人(100)的身体(102)下方。19.根据权利要求13
‑
18中任一项所述的机器人(100),其中,所述操作还包括,在将相应摆动腿(104
sw
)的远端(106)移动到目标步伐位置的同时:检测机器人(100)的相应摆动腿(104
sw
)和机器人(100)的对侧站立腿(104
c
)之间的冲击(310);和基于检测到的冲击(310),将机器人(100)的相应摆动腿(104
sw
)的远端(106)从机器人(100)的对侧站立腿(104
c
)移开到调整后的步伐位置,调整后的步伐位置在楼梯的相应步伐区域(220)内并相对于目标步伐位置移位。20.根据权利要求13
‑
19中任一项所述的机器人(100),其中,所述操作还包括,在将相应摆动腿(104
sw
)的远端(106)移动到目标步伐位置的同时:检测导致机器人(100)不稳定的机器人(100)的相应摆动腿(104
sw
)的绊倒条件;和基于检测到的绊倒条件,抬升相应摆动腿的远端(106)。21.根据权利要求13
‑
20中任一项所述的机器人(100),其中,所述操作还包括,在机器人(100)穿越楼梯(20)之前,选择用于以固定节奏穿越楼梯(20)的运动控制器(120),所述固定节奏基于为每个楼梯(20)确定的相应步伐区域(220)。
22.根据权利要求13
‑
21中任一项所述的机器人(100),其中,所述操作还包括,当将所述机器人(100)的相应摆动腿(104
sw
)的远端(106)移动到目标步伐位置时,将站立腿(104
st
)的远端(106)定位在后楼梯(20)上,所述后楼梯(20)位于以下位置之一:当机器人(100)正在上楼梯(20)时在与相应摆动腿(104
sw
)的目标步伐位置相关联的楼梯(20)下方;或者当机器人(100)正在下楼梯(20)时在与相应摆动腿(104
sw
)的目标步伐位置相关联的楼梯(20)上方。23.根据权利要求22所述的机器人(100),其中,机器人(100)的相应摆动腿(104
sw
)的远端(106)的运动和机器人(100)的站立腿(104
st
)的远端(106)的运动以固定的节奏发生。24.根据权利要求13
‑
23中任一项所述的机器人(100),其中,为每个楼梯(20)确定的相应步伐区域(220)与相应楼梯(20)的踏板部分(22)相关联。
技术总结
一种用于通过楼梯(20)的方法(500)包括接收关于机器人(100)在具有楼梯的环境(10)中操纵的图像数据(164)。这里,机器人包括两条或更多条腿(104)。在机器人穿越楼梯之前,对于每个楼梯,该方法还包括基于接收的图像数据确定相应的步伐区域(220)。步伐区域为机器人的相应摆动腿的远端(106)识别相应楼梯上的安全放置区域。同样在机器人穿越楼梯之前,该方法包括将机器人的重量分布向机器人的前部移位。该方法还包括,对于每个楼梯,将机器人的相应摆动腿的远端移动到目标步伐位置,其中目标步伐位置在楼梯的相应步伐区域内。置在楼梯的相应步伐区域内。置在楼梯的相应步伐区域内。
技术研发人员:E.惠特曼 G.C.费伊 B.斯维林
受保护的技术使用者:波士顿动力公司
技术研发日:2019.08.23
技术公布日:2021/11/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。