1.本实用新型涉及虾类加工技术领域,尤其是涉及一种虾体加工装置。
背景技术:
2.随着人民生活水平的不断提高,消费者对于高蛋白、高营养的虾类制品的喜爱也不断提升,这极大地推进了水产行业的迅猛发展,而我国巨大的人口需求体量,也对水产品加工行业提出了更为迫切的产业升级诉求。
3.目前的水产品行业,在对虾体的自动化加工过程中,需要通过流水线上的各种加工处理机构,逐一实现对虾体的清理、剥壳、去虾线、去虾脚、分选等自动化机械加工,但是,发明人经研究发现,现有的虾体自动化加工过程均没有考虑到虾体本身的形状特征限制,而在实际的加工过程中,有些虾类的虾体形状过于弯曲,难以上料,不利于后续对虾体的自动化加工,导致加工精度受到影响,最终对虾体的加工处理效果较差。
技术实现要素:
4.本实用新型提供一种虾体加工装置,充分考虑在虾体自动化加工过程中的虾体弯曲形状的影响问题,通过构建能够将弯曲虾体掰直展平的虾体加工装置,优化了后续对虾体的自动化加工进程,保障了对虾体的加工处理效果。
5.为了解决上述技术问题,本实用新型实施例提供了一种虾体加工装置,包括:支架、运动机构、动力机构和针刺机构;
6.所述支架的一侧设有所述运动机构,所述运动机构包括固定块、移动块、固定推块、移动推块;所述固定块与所述移动块内均设有气缸;所述固定推块、所述移动推块均通过对应的气缸推杆可伸缩移动地与对应的所述气缸的输出端连接;
7.所述动力机构包括旋转轴、同步轮、传动皮带和驱动电机;所述旋转轴沿所述固定块的长度方向设于所述固定块的侧部,所述旋转轴与所述移动块固定连接,且所述旋转轴可相对于所述固定块往复旋转;所述驱动电机设于所述支架的另一侧;所述旋转轴的一端设有所述同步轮,所述同步轮通过所述传动皮带与所述驱动电机的转轴连接;
8.所述针刺机构包括动针与定针,所述动针朝着待加工虾体的一端设于所述移动推块的端部;所述定针朝着待加工虾体的另一端设于所述固定推块的端部。
9.作为其中一种优选方案,所述针刺机构还包括限位针;
10.所述限位针朝着待加工虾体的中央部设于所述固定推块的端部。
11.作为其中一种优选方案,所述支架的底部设有退料挡板;所述退料挡板开设有供所述动针运动的开口、供所述定针穿过的第一通孔和供所述限位针穿过的第二通孔。
12.作为其中一种优选方案,所述支架为l形结构。
13.作为其中一种优选方案,所述动针的数量为1个。
14.作为其中一种优选方案,所述定针的数量为1个。
15.作为其中一种优选方案,所述限位针的数量为1个。
16.作为其中一种优选方案,所述移动推块的端部设有动针架,所述动针通过所述动针架与所述移动推块的端部连接;
17.所述固定推块的端部设有定针架,所述定针通过所述定针架与所述固定推块的端部连接。
18.作为其中一种优选方案,所述驱动电机的转轴上设有主动轮,所述同步轮通过所述传动皮带与所述主动轮连接。
19.作为其中一种优选方案,所述旋转轴的一端还设有连接法兰。
20.相比于现有技术,本实用新型实施例的有益效果在于,在支架上构建相互配合、协同作用的运动机构、动力机构和针刺机构,其中的固定推块在对应气缸的作用下只做上下的伸缩运动,移动推块在对应的气缸与旋转轴的共同作用下既能做上下的伸缩运动,也能做左右的往复运动,进而通过在固定推块端部设置定针,在移动推块端部设置动针,二者相互配合刺入虾体的对应位置,将待加工虾体的一端固定,另一端掰直,从而展平虾体,最终通过伸缩运动将加工后的虾体放回传送带中。整个加工装置自动化程度较高,能够实现将弯曲虾体掰直的效果,从而优化了后续对虾体的自动化加工进程,保障了对虾体的加工处理效果。
附图说明
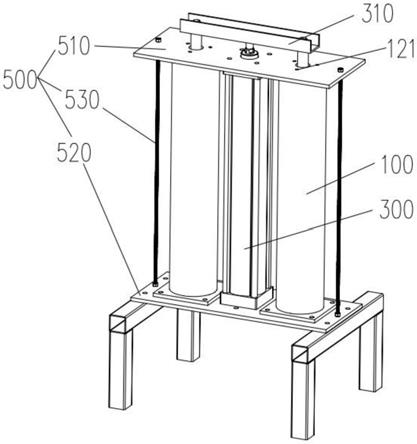
21.图1是本实用新型其中一种实施例中的虾体加工装置的结构示意图;
22.图2是本实用新型其中一种实施例中的虾体加工装置的第一阶段的运动示意图;
23.图3是本实用新型其中一种实施例中的虾体加工装置的第二阶段的运动示意图;
24.图4是本实用新型其中一种实施例中的虾体加工装置的第三阶段的运动示意图;
25.图5是本实用新型其中一种实施例中的虾体加工装置的第四阶段的运动示意图;
26.其中,1、支架;11、退料挡板;21、固定块;22、移动块;23、固定推块;24、移动推块;25、气缸;25’、气缸;26、气缸推杆;26’、气缸推杆;27、动针架;28、定针架;31、旋转轴;32、同步轮;33、传动皮带;34、驱动电机;35、主动轮;36、连接法兰;41、动针;42、定针;43、限位针。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.在本技术描述中,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,除非另有说明,“多个”的含义是两个或两个以上。
29.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本
申请中的具体含义。
30.在本技术的描述中,需要说明的是,除非另有定义,本实用新型所使用的所有的技术和科学术语与属于本的技术领域的技术人员通常理解的含义相同。本实用新型中说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型,对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
31.本实用新型一实施例提供了一种虾体加工装置,具体的,请参见图1至图5,其中图1示出为本实用新型其中一种实施例中的虾体加工装置的结构示意图,图2示出为本实用新型其中一种实施例中的虾体加工装置的第一阶段的运动示意图,图3示出为本实用新型其中一种实施例中的虾体加工装置的第二阶段的运动示意图,图4示出为本实用新型其中一种实施例中的虾体加工装置的第三阶段的运动示意图,图5示出为本实用新型其中一种实施例中的虾体加工装置的第四阶段的运动示意图,虾体加工装置具体包括:支架1、运动机构、动力机构和针刺机构;
32.所述支架的一侧设有所述运动机构,所述运动机构包括固定块21、移动块22、固定推块23、移动推块24;所述固定块21与所述移动块22内均设有气缸25(图中显示为固定块21内的气缸25,移动块22内的气缸25’);所述固定推块23、所述移动推块24均通过对应的气缸推杆26可伸缩移动地与对应的所述气缸的输出端连接(图中显示为固定推块23通过对应的气缸推杆26与对应的气缸25的输出端连接,移动推块24通过对应的气缸推杆26’与对应的气缸25’的输出端连接);
33.所述动力机构包括旋转轴31、同步轮32、传动皮带33和驱动电机34;所述旋转轴31沿所述固定块21的长度方向设于所述固定块21的侧部,所述旋转轴31与所述移动块22固定连接,且所述旋转轴31可相对于所述固定块21往复旋转;所述驱动电机34设于所述支架1的另一侧;所述旋转轴31的一端设有所述同步轮32,所述同步轮32通过所述传动皮带33与所述驱动电机34的转轴连接;
34.所述针刺机构包括动针41与定针42,所述动针41朝着待加工虾体的一端设于所述移动推块24的端部;所述定针42朝着待加工虾体的另一端设于所述固定推块23的端部。
35.应当说明的是,在对虾体自动化加工的过程中,不同的虾类具有不同的形状特征,某些虾类如皮皮虾的弯曲程度较小,对后续的上料及精密加工影响较小,但诸如红虾、对虾、毛虾等其他种类,其本身的弯曲程度较大,这对于后续的自动化加工处理会产生难以预估的影响,导致对虾体的加工效果较差。有鉴于此,本实用新型实施例构建了一种能够将我拿去虾体掰直的虾体加工装置,基本原理是通过刺针刺入虾体从而固定位置,固定块保持位置不变,移动块移动将弯曲虾体的一端掰直,最终展平虾体。
36.请参见图2至图5(图2至图5均是以俯视的视角呈现虾体被掰直的过程),为实现将单个弯曲虾体掰直,本实用新型实施例中的虾体加工装置包括四个工作阶段:第一阶段,当传送带上的待加工虾体被传输至加工装置底部时,优选地,由相应的视觉识别装置(如摄像头等)确定待加工虾体的弯曲弧度,从而驱动电机转动相应角度,在传动皮带的带动下使得旋转轴转动,进而使得与旋转轴固定连接的移动块转动;第二阶段,移动块移动至待加工虾体的弯曲一侧上方(在图中即移动至虾尾处),固定块保持在待加工虾体的未弯曲一侧上方(在图中即移动至虾头处),此时移动块与固定块内的气缸分别动作,使得移动推块与固定推块伸出,刺针向下运动,定针刺入待加工虾体的未弯曲一端,动针刺入待加工虾体的弯曲
一端;第三阶段,由驱动电机回转相应角度,在传动皮带的带动下使得旋转轴回转,进而使得与旋转轴固定连接的移动块转动,带动刺入动针的待加工虾体的弯曲一端(图中即虾尾)移动;第四阶段,虾体被掰直,待加工虾体的两端达到基本对应的位置,刺针收回,即完成对单个弯曲虾体的加工处理。
37.进一步地,在上述实施例中,所述针刺机构还包括限位针43;所述限位针43朝着待加工虾体的中央部设于所述固定推块23的端部。为了进一步优化对弯曲虾体的掰直动作,结合不同的虾类的尺寸大小因素影响,优选地,以虾体第3节为虾体中心点,限位针用于刺入虾体的中心点位置,从而实现在掰直过程中,对于大尺寸虾体的位置固定,优选地,在加工装置动作前,将定针、动针和限位针移动至与虾体尾弯曲轮廓线角度一致的对应位置处,启动对应的气缸与驱动电机,最终使定针、动针和限位针在同一直线上,从而掰直虾体。
38.进一步地,在上述实施例中,所述支架1的底部设有退料挡板11;所述退料挡板11开设有供所述动针41运动的开口、供所述定针42穿过的第一通孔和供所述限位针43穿过的第二通孔。退料挡板的作用是方便加工装置在掰直一个虾体后,刺针收回,已掰直的虾体在刺针回缩时触碰到退料挡板,进而落下至传送带上,从而简化了掰直加工后的虾体回收动作。
39.进一步地,在上述实施例中,所述支架1为l形结构。当然,支架的形状由实际的加工要求与成本因素所决定。
40.对于正常尺寸的弯曲虾体,上述实施例中的动针、定针与限位针的数量均优选为1个。当然,不同的虾类形状尺寸各有差异,例如阿根廷大红虾的尺寸较大,采用单个的动针、定针与限位针的加工处理效果往往不尽人意,因此,可根据实际的加工要求与虾体尺寸对应设置不同数量的动针、定针与限位针。
41.为了进一步优化虾体加工装置的结构,在所述移动推块24的端部设有动针架27,所述动针41通过所述动针架27与所述移动推块24的端部连接;所述固定推块23的端部设有定针架28,所述定针42通过所述定针架28与所述固定推块23的端部连接。当然,考虑到动针的移动幅度可能偏大,因此,也可将动针架与定针架的对应位置设置相互卡接的卡槽,当动针架运动幅度较大触碰至定针架时,对应的卡槽相互卡接,使得装置不会因运动幅度较大而产生相互碰撞的机械故障。
42.在上述实施例中,动力机构的动力源为驱动电机34,通过皮带传动的方式,使得旋转轴31在驱动电机34的转动下相应转动,优选地,所述驱动电机34的转轴上设有主动轮35,所述同步轮32通过所述传动皮带33与所述主动轮35连接。
43.进一步地,在上述实施例中,所述旋转轴31的一端还设有连接法兰36。连接法兰用于连接至加工流水线上的机架上,进而保障加工装置的稳定性。
44.本实用新型实施例提供的虾体加工装置,有益效果在于,在支架上构建相互配合、协同作用的运动机构、动力机构和针刺机构,其中的固定推块在对应气缸的作用下只做上下的伸缩运动,移动推块在对应的气缸与旋转轴的共同作用下既能做上下的伸缩运动,也能做左右的往复运动,进而通过在固定推块端部设置定针,在移动推块端部设置动针,二者相互配合刺入虾体的对应位置,将待加工虾体的一端固定,另一端掰直,从而展平虾体,最终通过伸缩运动将加工后的虾体放回传送带中。整个加工装置自动化程度较高,能够实现将弯曲虾体掰直的效果,从而优化了后续对虾体的自动化加工进程,保障了对虾体的加工
处理效果。
45.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。