1.本技术涉及机器人的领域,尤其是涉及一种具有拨号功能的巡检机器人。
背景技术:
2.巡检机器人在室外、室内巡检领域得到了广泛应用,代替了人工巡检的繁重劳动,还能够应用于通道较窄、有害环境等人工不便于巡检的场所。
3.相关技术中,巡检机器人在对设备进行巡检的过程中检测到设备运行温度异常时,先将告警信息反馈给后台,再由后台工作人员通知相关人员进行检修,导致了中间时间的浪费,尚有改进的空间。
技术实现要素:
4.为了使得巡检机器人检测设备运行温度异常时直接通知相关人员进行检修,减少中间时间的浪费,本技术提供一种具有拨号功能的巡检机器人。
5.本技术提供的一种具有拨号功能的巡检机器人采用如下的技术方案:
6.一种具有拨号功能的巡检机器人,包括机壳,还包括用于检测设备运行温度并转换为温度检测信号的温度检测装置、连接于温度检测装置以接收温度检测信号并输出比较信号的比较装置、连接于比较装置以为比较装置提供基准信号的基准装置、连接于比较装置以接收比较信号并输出控制信号的控制装置和连接于控制装置以接收控制信号并响应于控制信号的拨号装置;
7.温度检测信号大于基准信号时,拨号装置拨号。
8.通过采用上述技术方案,当温度检测信号大于基准信号时,即设备运行温度异常,比较装置输出高电平,控制装置控制拨号装置工作直接拨号给先关工作人员通知其进行检修,减少中间时间的浪费,保证了设备检修的及时性。
9.可选的,所述温度检测装置为红外热成像仪。
10.可选的,所述拨号装置包括壳体,所述壳体的两相对侧壁上均固定有安装板,所述机壳的侧壁上固定有两个立板,两所述立板上均固定有卡接板,两所述卡接板呈相向设置,所述卡接板与所述立板、机壳配合形成有供卡接板滑移卡嵌的卡嵌槽。
11.通过采用上述技术方案,安装板卡嵌于卡嵌槽内,以将壳体安装于机壳上,方便对拨号装置进行拆装,提高了拨号装置拆装的便利性。
12.可选的,所述卡接板上螺纹连接有压紧卡接板的锁定螺柱。
13.通过采用上述技术方案,壳体安装于机壳上时,锁定螺柱压紧安装板对拨号装置进行锁定,使得拨号装置不易与机壳发生相对滑动,提高了拨号装置的稳定性。
14.可选的,所述锁定螺柱远离卡接板的一端设有握持杆。
15.通过采用上述技术方案,握持杆的设置,增加了锁定螺柱的握持面积,方便握持锁定螺柱,同时增大了旋转锁定螺柱的旋转力臂,提高了旋转锁定螺柱的旋转效率。
16.可选的,所述锁定螺柱远离卡接板的一端设有穿设孔,所述握持杆穿设于穿设孔
内且与所述锁定螺柱滑移连接,所述握持杆的两端设有限位件。
17.通过采用上述技术方案,限位件对握持杆进行限位,使得握持杆不易滑离锁定螺柱。
18.可选的,所述机壳上还固定有挡板以及卡接块,所述挡板位于所述立板的一端,所述卡接块位于所述立板的另一端;
19.壳体的两安装板从立板的另一端滑入卡嵌槽内,壳体的两相对侧壁分别与挡板以及卡接块一一对应抵接。
20.通过采用上述技术方案,壳体安装于机壳上时,挡板以及卡接块分别抵接于壳体的两侧,使得壳体不易与机壳发生相对滑动,提高了巡检机器人运动时拨号装置的稳定性。
21.可选的,所述卡接块远离挡板的一侧具有一导向面,所述导向面从挡块至卡接块倾斜向靠近机壳的方向设置。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.当温度检测信号大于基准信号时,即设备运行温度异常,比较装置输出高电平,控制装置控制拨号装置工作直接拨号给先关工作人员通知其进行检修,减少中间时间的浪费,保证了设备检修的及时性。
附图说明
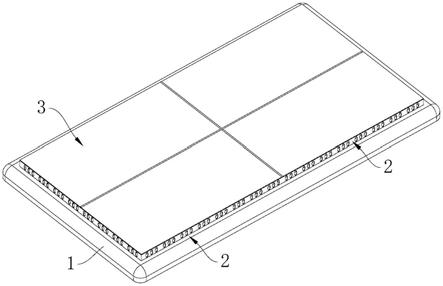
24.图1是本技术实施例的一种具有拨号功能的巡检机器人的结构示意图。
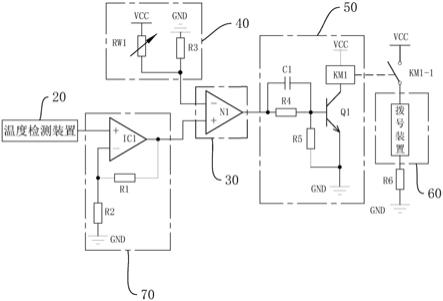
25.图2是本技术实施例的温度检测装置与放大装置、比较装置、基准装置、控制装置、拨号装置的电路连接图。
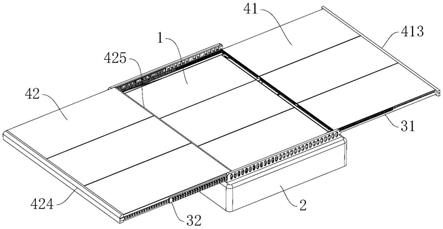
26.图3是本技术实施例的拨号装置与机壳的爆炸示意图。
27.图4是本技术实施例的握持杆与锁定螺柱、卡接板的爆炸示意图。
28.附图标记说明:10、机壳;11、立板;111、卡接板;1111、螺纹孔;12、卡嵌槽;112、锁定螺柱;113、握持杆;1121、穿设孔;1131、限位件;13、挡板;14、卡接块;141、导向面;20、温度检测装置;30、比较装置;40、基准装置;50、控制装置;60、拨号装置;61、壳体;611、安装板。
具体实施方式
29.以下结合附图1
‑
4对本技术作进一步详细说明。
30.本技术实施例公开一种具有拨号功能的巡检机器人。参照图1、2,具有拨号功能的巡检机器人包括机壳10、温度检测装置20、放大装置、比较装置30、基准装置40、控制装置50和拨号装置60。
31.温度检测装置20用于检测设备运行温度并转换为温度检测信号,放大装置用于对温度检测信号进行放大,比较装置30连接于温度检测装置20以接收温度检测信号并输出比较信号,基准装置40连接于比较装置30以为比较装置30提供基准信号,控制装置50连接于比较装置30以接收比较信号并输出控制信号,拨号装置60连接于控制装置50以接收控制信号并响应于控制信号。
32.温度检测装置20为红外热成像仪。
33.放大装置包括放大器ic1、第一电阻r1与第二电阻r2。放大器ic1的型号为lm324;
第一电阻r1的阻值为110kω,第二电阻r2的阻值为11kω。
34.放大器ic1的同向输入端与温度传感器的输出端连接,放大器ic1的反向输入端分别与第一电阻r1的一端、第二电阻r2的一端连接,第二电阻r2的另一端与地gnd连接,第一电阻r1的另一端与放大器ic的输出端连接。
35.比较装置30为比较器n1,比较器n1的型号为lm393;基准装置40包括第三电阻r3和第一电位器rw1,第三电阻r3的阻值为80kω,第一电位器rw1的型号为3296w,标称阻值范围为10ω
‑
2mω。
36.比较器n1的同相输入端与放大器ic1的输出端连接,比较器n1的反相输入端分别与第三电阻r3的一端以及第一电位器rw1的一端连接,第一电位器rw1的另一端与电源vcc连接,第三电阻r3的另一端与地gnd连接。
37.当放大之后的温度检测信号小于基准信号时,比较器n1输出低电平的比较信号;当放大信号大于基准信号时,比较器n1输出高电平的比较信号。
38.参照图2,控制装置50包括第一三极管q1、第四电阻r4、第五电阻r5、第一电磁继电器km1和第一电容器c1;第一三极管q1为pnp型的三极管且型号为2sc4019,其中第一三极管的导通阈值为0.7v;第四电阻r4的阻值为3kω,第五电阻r5的阻值为1.5kω,第一电磁继电器km1的型号为hh52p且为常开型,第一电容器c1的电容值为200pf。
39.第一三极管q1的基极分别与第四电阻r4的一端、第五电阻r5的一端、第一电容器c1的一端连接,第四电阻r4的另一端与第一电容器c1的另一端、第一比较器n1的输出端连接,第五电阻r5的另一端分别与第一三极管q1的发射极、地gnd连接;第一电磁继电器km1的一端与第一三极管q1的集电极连接,第一电磁继电器km1的另一端与电源vcc连接。
40.参照图2,拨号装置60为本领域技术人员公知常识,此处不做赘述,拨号装置60内存储有故障检修人员的号码,拨号装置60的一端连接有第六电阻r6,第六电阻r6的阻值为2kω;第六电阻r6的一端与拨号装置60的一端连接,另一端与地gnd连接,拨号装置60的另一端与第一电磁继电器km1常开触点km1
‑
1的一端连接,第一电磁继电器km1常开触点km1
‑
1的另一端与电源vcc连接。
41.当温度检测信号大于基准信号时,比较装置30输出高电平,第一三极管q1导通,第一电磁继电器km1常开触点km1
‑
1闭合,拨号装置60工作拨出号码给故障检修人员,通知故障检修人员;反之,比较装置30输出低电平,第一三极管q1不导通,第一电磁继电器km1常开触点km1
‑
1保持开启,拨号装置60不工作。
42.参照图1、3,拨号装置60包括壳体61,壳体61的两相对侧壁上均固定有安装板611,安装板611位于壳体61靠近机壳10的一侧。机壳10的上侧固定有两个立板11,两个立板11互相平行,立板11的上侧一一对应固定有卡接板111,两个卡接板111呈相向设置,卡接板111与立板11、机壳10配合形成有卡嵌槽12,安装板611卡嵌于卡嵌槽12内,以将拨号装置60安装于机壳10上。
43.为了安装拨号装置60时进行限位,机壳10上还固定有挡板13和卡接块14,挡板13与卡接块14分别位于立板11的两端,拨号装置60的安装板611卡接于卡嵌槽12内时,挡板13与卡接块14分别抵接于拨号装置60的壳体61的两侧,以使得拨号装置60安装于机壳10上时不易与机壳10发生相对滑动。卡接块14远离挡块的一侧设有导向面141,导向面141从挡块至卡接块14倾斜向靠近机壳10的方向设置,以引导拨号装置60安装于机壳10上。
44.参照图3、4,卡接板111上设有锁定螺柱112,锁定螺柱112用于压紧锁定安装板611。卡接板111上开设有螺纹孔1111,螺纹孔1111的轴线与卡接板111的板面互相垂直,锁定螺柱112穿设于螺纹孔1111内并与卡接板111螺纹连接,以对卡接于卡嵌槽12内的安装板611进行压紧锁定。
45.为了方便转动锁定螺柱112,锁定螺柱112的上端还设有握持杆113,以方便握持锁定螺柱112并增加锁定螺柱112的旋转力臂。握持杆113可以固定于锁定螺柱112的上端,也可以滑移连接于锁定螺柱112的上端,本实施例中锁定螺柱112的上端开设有穿设孔1121,穿设孔1121的轴线与锁定螺柱112的轴线垂直,握持杆113穿设于穿设孔1121内且与锁定螺柱112滑移连接。
46.为了使得握持杆113不易滑离锁定螺柱112,握持杆113的两端均设有限位件1131,限位件1131为螺母,螺母螺纹连接于握持杆113的两端,螺母的尺寸大于穿设孔1121的直径。
47.本技术实施例一种具有拨号功能的巡检机器人的实施原理为:当温度检测装置20输出的温度检测信号大于基准信号时,即设备的运行温度异常,比较装置30输出高电平的比较信号,第一三极管q1导通,第一电磁继电器km1常开触点km1
‑
1闭合,拨号装置60工作直接拨出号码给故障检修人员,通知故障检修人员,减少了中间时间的浪费;反之,比较装置30输出低电平,第一三极管q1不导通,第一电磁继电器km1常开触点km1
‑
1保持开启,拨号装置60不工作。
48.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。