1.本发明属于螺杆真空泵制造技术领域,涉及一种螺杆真空泵及其螺杆转子。
背景技术:
2.近年来,随着国内制药、化工、半导体等行业的蓬勃发展,工业生产中涌现出越来越多的低污染、高真空要求的使用场景。其中,螺杆真空泵是获得干燥、低污染的高真空环境,以及压缩洁净气体的大中型干泵的主力泵型。具体来说,螺杆真空泵是利用一对螺杆转子在泵壳中作同步高速反向旋转而产生的吸气和排气作用的抽气设备,其核心部件为两个相互啮合的螺杆转子,而转子端面型线决定了转子的结构和真空泵的工作性能。例如,型线影响着真空泵的容积效率,热力学性能,良好的型线可以提高真空泵的效率,减少气体的泄漏量。
3.在现有技术中,干式螺杆真空泵两个转子的型线选取一般符合啮合定理,即转子间可以实现非接触啮合。而现有转子传统型线中存在尖点,使得生成的转子出现棱边,易形成泄漏三角形,导致气体返流,降低真空泵的极限真空度,且尖点形成的棱边导致转子转动时易发生磨损,从而增大螺杆真空泵的工作间隙,降低螺杆真空泵工作性能。为了解决上述尖点导致的问题,本领域技术人员开发设计了一种具有光滑连续型线的螺杆转子,如中国专利文献【申请号:201510756059.8】公开的全光滑螺杆转子,该螺杆转子端面型线由7段曲线组成且曲线之间光滑连接,不存在尖点,采用圆弧de和摆线的等距曲线ef将齿顶圆弧cd和齿根圆弧fg光滑连接,采用圆弧ga将齿根圆弧fg和圆渐开线ab光滑连接,采用摆线的等距曲线bc将圆渐开线ab和齿顶圆弧cd光滑连接;相互共轭啮合的2个螺杆转子端面型线相同,工作中能够实现正确的啮合,且啮合密封效果较好;在实际生产过程中,受到加工误差与运行过程中转子的热变形效应的影响,将上述转子装配到真空泵泵壳内时,往往需要给予两转子之间、以及转子与泵腔之间设计一合理间隙,防止间隙过小热卡死现象,同时也防止间隙过大导致极限真空度降低。由此,为了保证螺杆真空泵具有良好的工作性能指标,设计合理稳定的间隙尤其重要。
4.但是,由于上述光滑螺杆的型线设计出于光滑无尖点以提高啮合密封效果的目的,在设计两转子时,采用了无啮合间隙配合的设计,那么完成转子设计后,只能通过后期修正获得间隙,现有常规采用的修正手段一般通过调整转子之间的中心距,或者根据所需间隙要求,对转子或者泵腔进行二次打磨加工。也就是说,无论后期采用何种修正手段,由于上述现有螺杆型线设计无法直接生成啮合间隙,这样不仅影响了螺杆真空泵的制造效率,而且在后期修正过程中,受到加工、装配精度的影响,往往会导致最后修正后的间隙与预想的间隙要求误差较大,最终对真空泵的性能会造成比较大的影响。
技术实现要素:
5.本发明的目的是针对现有的技术存在上述问题,提出了一种螺杆真空泵及其螺杆转子,本发明所要解决的技术问题是如何通过合理设计螺杆转子端面型线以提高螺杆真空
泵的制造效率和工作性能。
6.本发明的目的可通过下列技术方案来实现:一种螺杆真空泵的螺杆转子,所述螺杆转子包括端面型线相同的阴转子和阳转子,其特征在于,所述阴转子和阳转子的端面型线均由8段曲线组成,该8段曲线依次连续光滑相接,分别为圆弧ab、修正外摆线bc、圆弧cd、齿根圆de、圆弧ef、修正渐开线fg、圆弧gh、齿顶圆ha;
7.所述圆弧ab的曲线公式为:
8.x
ab
=(r
a
‑
r3)cos(
‑
θ)
‑
r3cos(t)
9.y
ab
=(r
a
‑
r3)sin(
‑
θ) r3sin(t)
10.所述修正外摆线bc的曲线公式为:
[0011][0012][0013]
所述圆弧cd的曲线公式为:
[0014]
x
cd
=(r
f
r4‑
d2)cos(σ)
‑
r4cos(t)
[0015]
y
cd
=(r
f
r4‑
d2)sin(σ) r4sin(t)
[0016]
所述齿根圆de的曲线公式为:
[0017][0018][0019]
所述圆弧ef的曲线公式为:
[0020]
x
de
=(r
f
r1)cos(90 β)
‑
r1cos(t)
[0021]
y
de
=(r
f
r1)sin(90 β) r1sin(t)
[0022]
所述修正渐开线fg的曲线公式为:
[0023][0024]
[0025]
所述圆弧gh的曲线公式为:
[0026]
x
gh
=
‑
(r
a
‑
r2)cos(90
‑
γ)
‑
r2cos(t)
[0027]
y
gh
=
‑
(r
a
‑
r2)sin(90
‑
γ) r2sin(t)
[0028]
所述齿顶圆ha的曲线公式为:
[0029][0030][0031]
上述曲线公式中,t为弧度变量参数,取值范围0~2π;d1、d2、d3分别为生成转子各面预设所需的啮合间隙;d4为生成转子外周与泵壳之间预设所需的周向间隙;r
a
为齿顶圆半径;r
f
为齿根圆半径;r
e
为节圆半径;r0为基圆半径;r1为圆弧ef的半径;r2为圆弧gh的半径;r3为圆弧ab的半径;r4为圆弧cd的半径;θ为圆弧ab的相位角;为修正外摆线bc的相位角;σ为圆弧cd的相位角;β为圆弧ef的相位角;γ为圆弧gh的相位角;
[0032]
当阴转子和阳转子安装到螺杆真空泵的泵壳内时,所述阴转子和阳转子两者之间直接形成所需的啮合间隙,并且所述阴转子和阳转子分别与泵壳之间直接形成所需的周向间隙。
[0033]
区别于现有技术中的螺杆型线设计无法直接生成啮合间隙,在后续真空泵制造组装过程还需二次修正获得间隙的问题;本发明通过对螺杆转子的端面型线进行了改进设计,将间隙参数引入端面型线的曲线公式,得到一种连续光滑无尖点,且能够直接生成各类要求间隙的型线,使得端面型线生成的阴、阳螺杆转子,配合后可直接生成稳定的各类所需间隙,避免了传统型线无法直接生成啮合间隙,需后期修正获得间隙的问题;具体来说,本螺杆转子的端面型线采用8段曲线设计,依次为圆弧ab、修正外摆线bc、圆弧cd、齿根圆de、圆弧ef、修正渐开线fg、圆弧gh、齿顶圆ha,上述8段曲线组成了连续光滑的型线;其中,修正外摆线bc、圆弧cd、齿根圆de、修正渐开线fg通过设计的曲线公式可以根据预设所需的啮合间隙生成,齿顶圆ha通过设计的曲线公式可以根据预设所需的周向间隙生成,这样使得最终形成的螺杆转子的端面型线能够直接生成各类满足要求的间隙;那么,根据该端面型线制造生成的阴、阳螺杆转子就可以直接安装在泵壳内,无需二次修正,其安装后就自然形成了满足要求的啮合间隙和周向间隙。因此,通过以上型线设计,使得生成的螺杆转子无需二次修正就可直接形成所需的各类间隙,这样就大大提高了真空泵的制造效率,并且避免了二次修正所带来的误差,使得获得的间隙稳定,由于这些间隙的稳定性和大小极大影响了泵的极限真空等技术性能指标,也就是说,通过以上设计使得螺杆真空泵的工作性能也能够得到提高。
[0034]
在上述的螺杆真空泵的螺杆转子中,所述阴转子由上述端面型线沿轴向作逆时针螺旋展开生成,所述阳转子由上述端面型线沿轴向作顺时针螺旋展开生成,所述阴转子和阳转子均具有齿顶面、凸面、凹面、齿根面。在本发明中,上述阴、阳转子采用同一端面型线,除了旋向相反外,其余结构均相同,这样有利于间隙的稳定设计,从而有利于提高真空泵的工作性能。
[0035]
在上述的螺杆真空泵的螺杆转子中,所述啮合间隙包括齿形间隙、齿侧间隙和径
向间隙,齿形间隙为形成于阴转子和阳转子的凹面之间的间隙,齿侧间隙为形成于阴转子和阳转子的凸面之间的间隙,径向间隙为形成于阴转子的齿顶面和阳转子的齿根面之间的间隙,d1为齿侧间隙,d2为径向间隙、d3为齿形间隙。齿侧间隙、径向间隙、齿形间隙这些啮合间隙是决定真空泵性能的关键参数,那么,依据上述间隙参数获取的对应曲线组成的端面型线,其生成的转子能够更好地提高真空的性能。
[0036]
在上述的螺杆真空泵的螺杆转子中,所述周向间隙为形成于阴转子或阳转子的齿顶面与泵壳内周面之间的间隙。周向间隙也是决定真空泵性能的关键参数,那么,依据上述间隙参数获取的对应曲线组成的端面型线,其生成的转子能够更好地提高真空的性能。
[0037]
与现有技术相比,本螺杆真空泵的螺杆转子具有以下优点:
[0038]
1、由于本螺杆转子的端面型线依据各类间隙参数设计而成,其安装后无需二次修正就可直接形成所需的各类间隙,这样就大大提高了真空泵组装、制造的效率;
[0039]
2、由于本螺杆转子安装后自带啮合间隙,无需修正,这样就避免了二次修正所带来的误差,使得获得的间隙稳定,从而使得螺杆真空泵的工作性能也能够得到提高;
附图说明
[0040]
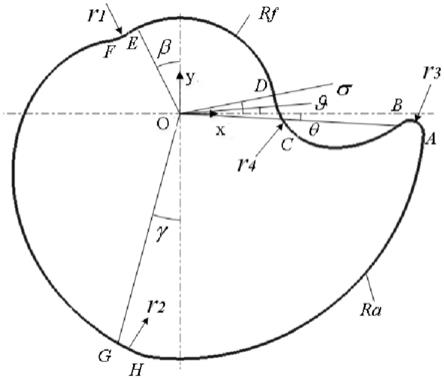
图1是本螺杆真空泵的螺杆转子的端面型线形状示意图。
[0041]
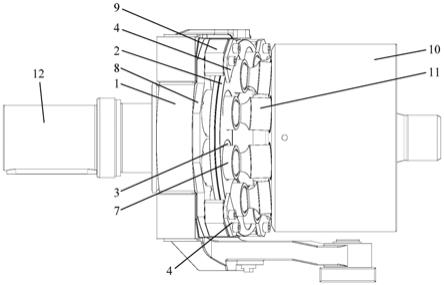
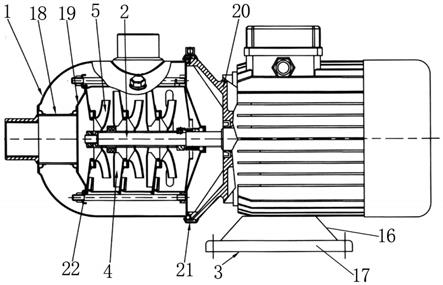
图2是本螺杆真空泵的螺杆转子安装啮合后的结构示意图。
[0042]
图3是本螺杆转子安装啮合后四个不同角度的端面型线配合示意图。
[0043]
图中,1、阴转子;2、阳转子;3、泵壳;4、齿顶面;5、凸面;6、凹面;7、齿根面。
具体实施方式
[0044]
以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
[0045]
实施例一:
[0046]
具体来说,如图1至3所示,本螺杆真空泵的螺杆转子包括端面型线相同的阴转子1和阳转子2,阴转子1和阳转子2的端面型线均由8段曲线组成,该8段曲线依次连续光滑相接,分别为圆弧ab、修正外摆线bc、圆弧cd、齿根圆de、圆弧ef、修正渐开线fg、圆弧gh、齿顶圆ha;
[0047]
圆弧ab的曲线公式为:
[0048]
x
ab
=(r
a
‑
r3)cos(
‑
θ)
‑
r3cos(t)
[0049]
y
ab
=(r
a
‑
r3)sin(
‑
θ) r3sin(t)
[0050]
修正外摆线bc的曲线公式为:
[0051]
[0052][0053]
圆弧cd的曲线公式为:
[0054]
x
cd
=(r
f
r4‑
d2)cos(σ)
‑
r4cos(t)
[0055]
y
cd
=(r
f
r4‑
d2)sin(σ) r4sin(t)
[0056]
齿根圆de的曲线公式为:
[0057][0058][0059]
圆弧ef的曲线公式为:
[0060]
x
de
=(r
f
r1)cos(90 β)
‑
r1cos(t)
[0061]
y
de
=(r
f
r1)sin(90 β) r1sin(t)
[0062]
修正渐开线fg的曲线公式为:
[0063][0064][0065]
圆弧gh的曲线公式为:
[0066]
x
gh
=
‑
(r
a
‑
r2)cos(90
‑
γ)
‑
r2cos(t)
[0067]
y
gh
=
‑
(r
a
‑
r2)sin(90
‑
γ) r2sin(t)
[0068]
齿顶圆ha的曲线公式为:
[0069][0070][0071]
上述曲线公式中,t为弧度变量参数,取值范围0~2π,单位rad;d1、d2、d3分别为生成转子各面预设所需的啮合间隙;d4为生成转子外周与泵壳3之间预设所需的周向间隙;d1、d2、d3、d4单位为mm;r
a
为齿顶圆半径;r
f
为齿根圆半径;r
e
为节圆半径;r0为基圆半径;r1为圆弧ef的半径;r2为圆弧gh的半径;r3为圆弧ab的半径;r4为圆弧cd的半径;r
a
、r
f
、r
e
、r0、r1、r2、
r3、r4单位为mm;θ为圆弧ab的相位角;为修正外摆线bc的相位角;σ为圆弧cd的相位角;β为圆弧ef的相位角;γ为圆弧gh的相位角,各相位角的单位为度;上述参数除了t这一变量以外,其余都是定值,只需输入t值就可获得对应的坐标(x
t
、y
t
),从而可以获得完整的端面型线。
[0072]
更具体地,阴转子1由上述端面型线沿轴向作逆时针螺旋展开生成,阳转子2由上述端面型线沿轴向作顺时针螺旋展开生成,阴转子1和阳转子2均具有齿顶面4、凸面5、凹面6、齿根面7。啮合间隙包括齿形间隙、齿侧间隙和径向间隙,齿形间隙为形成于阴转子1和阳转子2的凹面6之间的间隙,齿侧间隙为形成于阴转子1和阳转子2的凸面5之间的间隙,径向间隙为形成于阴转子1的齿顶面4和阳转子2的齿根面7之间的间隙,d1为齿侧间隙,d2为径向间隙、d3为齿形间隙。d4周向间隙为形成于阴转子1或阳转子2的齿顶面4与泵壳3内周面之间的间隙。当阴转子1和阳转子2安装到螺杆真空泵的泵壳3内时,阴转子1和阳转子2两者之间直接形成所需的啮合间隙,并且,阴转子1和阳转子2分别与泵壳3之间直接形成所需的周向间隙。
[0073]
通过本发明,本领域技术人员根据不同螺杆真空泵的尺寸要求,只需输入所需的预想间隙参数,就可直接获得能够生成自带啮合间隙和周向间隙的转子。
[0074]
实施例二:
[0075]
本实施例中的技术方案中,螺杆真空泵采用实施例一中的螺杆转子,即螺杆真空泵包括实施例一中的螺杆转子。
[0076]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
[0077]
尽管本文较多地使用了阴转子1、阳转子2、泵壳3、齿顶面4、凸面5、凹面6、齿根面7、等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。