1.本发明属于航空航天数据处理技术领域,具体涉及一种光电经纬仪与异址雷达联合弹道容错定位方法。
背景技术:
2.在航天器外测事后数据处理中,由于受到布站等各种因素的影响,常需要光电经纬仪与异址的雷达联合定位,这样既能发挥光电经纬仪角度测量与雷达距离测量精度高的优点,又能实现异址定位。长期以来,在航天器定位方法中受到高度重视和广泛应用。然而,由于光电经纬仪和雷达的测量数据中存在固有的系统误差和随机误差的影响,同时两者又处于异址约束的不同坐标下,会使得定位出的弹道参数产生部分的异常数据,从而很难有比较满意的定位结果。然而,事后弹道的分析、评价和鉴定是评估与改良制导系统精度及性能的重要信息依据,所以由外测设备测量的弹道必须是高精度、低误差的。在硬件测量设备的动态精度难以满足实际需求时,高精度的弹道容错定位方法是对硬件的一个有力补充。
技术实现要素:
3.本发明的目的是提供一种光电经纬仪与异址雷达联合弹道容错定位方法,能识别出弹道参数中的异常数据,从而提高了整条弹道的定位精度。
4.本发明所采用的技术方案是,一种光电经纬仪与异址雷达联合弹道容错定位方法,具体按照以下步骤实施:
5.步骤1、建立弹道参数的三阶差分模型,根据阈值原则识别出弹道参数中的异常参数与无异常参数;
6.步骤2、根据步骤1识别出的无异常参数建立弹道3次b样条模型;
7.步骤3、通过最小二乘法确定出步骤2模型中的样条系数估值并得到样条容错模型;
8.步骤4、由步骤1中识别出的异常参数以及步骤3确定出的样条容错模型得到异常参数的修正值;
9.步骤5、将步骤4得到的异常参数修正值替代原弹道参数中的异常参数,更新弹道参数,得到准确的定位结果。
10.本发明的特点还在于,
11.步骤1中,具体为:在x、y或者z方向的弹道参数中,{a
i
}i=1,2,l,n是一个等间隔采样的弹道参数数据序列,其中n为数据长度,对{a
i
}作3阶前向差分,得到三阶差分序列,如式(1)所示;
12.δ3a
i
=δ2a
i 1
‑
δ2a
i
ꢀꢀ
(1);
13.式(1)中,δ2a
i
=δa
i 1
‑
δa
i
,δ2a
i 1
=δa
i 2
‑
δa
i 1
;δa
i
=a
i 1
‑
a
i
,δa
i 1
=a
i 2
‑
a
i 1
;
14.在得到弹道参数的三阶差分序列{δ3a
i
},i=1,2,l,n
‑
3之后,可得三阶差分序列
的均方差σ,如式(2)所示;
[0015][0016]
式(2)中,m为数据的起始点,l为数据长度,σ为对应的均方差,如果σ>λ,λ为判断门限,将弹道参数中对应于该部分差分数据这一区域的弹道数据视为异常参数a
abnormal
;如果σ≤λ,则将该部分弹道参数视为无异常参数a
normal
,
[0017]
步骤2中,具体过程如下:
[0018]
由步骤1得到的无异常弹道参数用分段3次b样条函数表示,如式(3)所示;
[0019][0020]
式(3)中,为无异常弹道参数,t
i
为弹道参数的采样时间,l为数据长度;p为分段数,α
j
为每一段的未知样条系数,j=0,l,p;ε
i
为无异常弹道参数的随机误差向量;t0、t
p
分别为所处理弹道参数区间的两个时间端点,即t
p
=t
l
,t0=t1,t
j
为每一段弹道参数对应的时刻,并且t
j
=t0 jh;h为每个分段区间的时间长度,
[0021]
为三阶标准b样条函数,令则有b(t)如式(4)所示;
[0022][0023]
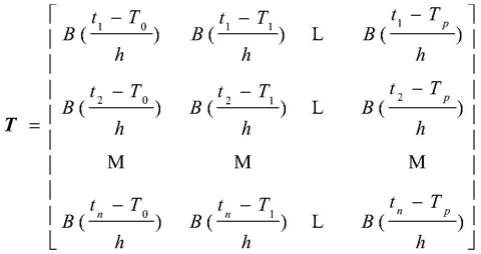
若令
[0024][0025]
并令ε=[ε1,l,ε
l
]
t
,则得到3次b样条模型,如式(5)所示;
[0026]
a
normal
=tα ε
ꢀꢀꢀꢀ
(5);
[0027]
其中,其中,
[0028]
步骤3中,具体过程如下:
[0029]
设随机误差向量ε在时间序列上独立同等方差σ2,由最小二乘法估计出样条系数估值如式(6)所示;
[0030][0031]
进一步得到样条容错模型
[0032]
式中,为待估数据序列,为待估数据序列的样条基函数,并且,
[0033][0034]
n为待估数据序列的长度,p为样条分段数,h为每个分段区间的时间长度。
[0035]
步骤4中,具体为:由步骤3中的计算弹道参数中异常区域数据的样条基函数再由样条容错模型得到异常区域数据的修正值,如式(7)所示;
[0036][0037]
本发明的有益效果是,由于三阶差分能分离出弹道参数中的非线性趋势,并通过阈值原则,能识别出异常数据,又因为3次b样条曲线可以很好的满足弹道曲线的特点,通过建立3次b样条容错模型可以对异常数据进行修正处理,从而得到准确的定位结果。实际的外弹道测量过程中误差是无法避免的,将测量数据中的测量误差存在的情况考虑其中,对弹道参数中的异常数据进行处理,使得定位出的弹道参数更加接近真实值,更有利于对评估与改良制导系统精度及性能。通过本发明光电经纬仪与异址雷达联合弹道容错定位方法得到的弹道参数,可以避免因光
‑
雷异址定位方法的弹道参数不准确而带来的巨大利益损失。
附图说明
[0038]
图1是本发明一种光电经纬仪与异址雷达联合弹道容错定位方法的流程图;
[0039]
图2是光电经纬仪与雷达联合定位关系图;
[0040]
图3是光电经纬仪与雷达两者测量信息相交时的关系图;
[0041]
图4是光电经纬仪与雷达两者测量信息相切时的关系图;
[0042]
图5是本发明光电经纬仪与异址雷达联合弹道容错定位方法的弹道参数结果以及光
‑
雷异址定位结果和gps弹道参数x方向的对比图;
[0043]
图6是本发明光电经纬仪与异址雷达联合弹道容错定位方法的弹道参数结果以及光
‑
雷异址定位结果和gps弹道参数y方向的对比图;
[0044]
图7是本发明光电经纬仪与异址雷达联合弹道容错定位方法的弹道参数结果以及光
‑
雷异址定位结果和gps弹道参数z方向的对比图;
[0045]
图8是本发明光电经纬仪与异址雷达联合弹道容错定位方法的弹道参数结果以及光
‑
雷异址定位结果和gps弹道参数x方向的差值图;
[0046]
图9是本发明光电经纬仪与异址雷达联合弹道容错定位方法的弹道参数结果以及光
‑
雷异址定位结果和gps弹道参数y方向的差值图;
[0047]
图10是本发明光电经纬仪与异址雷达联合弹道容错定位方法的弹道参数结果以及光
‑
雷异址定位结果和gps弹道参数z方向的差值图。
具体实施方式
[0048]
下面结合附图和具体实施方式对本发明进行详细说明。
[0049]
如图2所示,假设目标在发射系下的坐标为(x,y,z),光电经纬仪在发射系下站址为(x
g
,y
g
,z
g
),雷达在发射系下站址为(x
l
,y
l
,z
l
),雷达的距离测量信息为r,光电经纬仪发射系下的角度测量信息为a、e。光
‑
雷异址定位方法是通过图2中光电经纬仪与异址雷达的联合定位关系,来建立目标与测站的定位模型来得到目标弹道参数。如下式所示
[0050][0051]
对于上述定位模型,可解出一组或者两组目标的弹道参数。如图3所示,当光电经纬仪的测量信息形成的射线与雷达的测量信息形成的球面相交时,可解出两组目标弹道参数(x1,y1,z1),(x2,y2,z2),再通过测站与目标间的方向向量是否与光电经纬仪的测量信息形成的射线方向一致即可判别真正解(x,y,z)。但如图4所示,当光电经纬仪的测量信息形成的射线与雷达的测量信息形成的球面相切时,理论上可解出一组目标弹道参数(x,y,z),然而外弹道测量数据或大或小都含有一定的误差,此时由于测量信息误差的影响,将会解出两组弹道位置参数(x
′1,y
′1,z
′
1),(x
′2,y
′2,z
′2),若继续通过空间直线的方向向量也可判断出真正解(x,y,z),但这样势必会产生误差,经研究发现会在这一附近区域产生跃变的异常数据。
[0052]
本发明一种光电经纬仪与异址雷达联合弹道容错定位方法,对光
‑
雷异址定位方法的结果先建立弹道参数的三阶差分模型并根据阈值原则,识别出弹道参数中的异常数据,最后建立3次b样条容错模型对异常数据进行修正处理,从而得到准确的定位结果;
[0053]
如图1所示,具体按照以下步骤实施:
[0054]
步骤1、对光
‑
雷异址定位结果建立弹道参数的三阶差分模型,根据阈值原则识别出弹道参数中的异常参数与无异常参数;
[0055]
具体为:在x、y或者z方向的弹道参数中,{a
i
}i=1,2,l,n是一个等间隔采样的弹道参数数据序列,其中n为数据长度,对{a
i
}作3阶前向差分,得到三阶差分序列,如式(1)所示;
[0056]
δ3a
i
=δ2a
i 1
‑
δ2a
i
ꢀꢀꢀ
(1);
[0057]
式(1)中,δ2a
i
=δa
i 1
‑
δa
i
,δ2a
i 1
=δa
i 2
‑
δa
i 1
;δa
i
=a
i 1
‑
a
i
,δa
i 1
=a
i 2
‑
a
i 1
[0058]
在得到弹道参数的三阶差分序列{δ3a
i
},i=1,2,l,n
‑
3之后,由于差分可将弹道参数中趋势项剔除,所以可得三阶差分序列的均方差σ,如式(2)所示;
[0059][0060]
式(2)中,m为数据的起始点,l为数据长度,σ为对应的均方差,根据阈值原则,如果σ>λ,将弹道参数中对应于该部分差分数据这一区域的弹道数据视为异常参数a
abnormal
;如果σ≤λ,则将该部分弹道参数视为无异常参数a
normal
,
[0061]
λ为判断门限,是测量精度的3~5倍。为减少计算量,在三阶差分数据{δ3a
i
},i=1,2,l,n
‑
3中任取一段30个点的数据即可计算出测量精度,如下式所示;
[0062][0063]
式中,δ为测量精度,m
′
为所取三阶差分数据的起始点,l
′
为数据长度。
[0064]
步骤2、根据步骤1识别出的无异常参数建立弹道3次b样条模型;具体过程如下:
[0065]
3次b样条曲线是在贝塞尔曲线基础上推广来的,解决了贝塞尔曲线的许多不足之处,并且有着许多重要的性质:几何不变性、凸包性、保凸性、变差减小性、局部支撑性。
[0066]
由步骤1得到的无异常弹道参数可以用分段3次b样条函数表示,如式(3)所示;
[0067][0068]
式(3)中,为无异常弹道参数,t
i
为弹道参数的采样时间,l为数据长度;p为分段数,α
j
为每一段的未知样条系数,j=0,l,p;ε
i
为无异常弹道参数的随机误差向量;t0、t
p
分别为所处理弹道参数区间的两个时间端点,即t
p
=t
l
,t0=t1,t
j
为每一段弹道参数对应的时刻,并且t
j
=t0 jh;h为每个分段区间的时间长度,
[0069]
为三阶标准b样条函数,令则有b(t)如式(4)所示;
[0070][0071]
若令
[0072][0073]
并令ε=[ε1,l,ε
l
]
t
,则可得到3次b样条模型,如式(5)所示;
[0074]
a
normal
=tα ε
ꢀꢀꢀ
(5);
[0075]
其中,其中,
[0076]
步骤3、通过最小二乘法确定出步骤2模型中的样条系数估值并得到样条容错模型;具体过程如下:
[0077]
对于步骤2中样条未知系数α,设随机误差向量ε在时间序列上独立同等方差σ2,可由最小二乘法估计出样条系数估值,如式(6)所示;
[0078][0079]
进一步可得到样条容错模型
[0080]
式中,为待估数据序列,为待估数据序列的样条基函数,并且,
[0081][0082]
n为待估数据序列的长度,p为样条分段数,h为每个分段区间的时间长度,为样
条系数估值。
[0083]
步骤4、由步骤1中识别出的异常参数以及步骤3确定出的样条容错模型得到异常参数的修正值;
[0084]
由步骤3中的计算弹道参数中异常区域数据的样条基函数再由样条容错模型得到异常区域数据的修正值,如式(7)所示;
[0085][0086]
步骤5、将步骤4得到的异常参数修正值替代原弹道参数中的异常参数,更新弹道参数,得到准确的定位结果。
[0087]
本发明在光电经纬仪与异址雷达联合定位出目标弹道之后,根据弹道变化的连续性,当测量数据采样频率足够高时,相邻观测量之间的差距就会很小,而且只要目标弹道参数不发生异动,弹道位置曲线就不会发生突变。因此,可采用三阶差分模型将非线性趋势分离出来,再根据阈值原则,识别出异常数据。差分的优势在于能够将一个非平稳序列转变成平稳序列,特别是当时间序列中蕴含着显著的线性趋势,用一阶差分就可以提取出其中的趋势项。理论与实践结果均已表明,弹道关于时间t的泰勒展开最多为4次多项式,因此,对于弹道数据中的趋势通常低阶(二阶或者三阶)差分就可以提取曲线趋势的影响。
[0088]
识别出异常数据后,考虑到弹道曲线不会突变,所以,用剔除掉异常数据的数据集可以建立弹道的3次b样条容错模型。该模型除了对弹道参数具有容错功能外,还能通过对异常数据的修正以保证定位精度较高。原因是3次b样条一方面是以贝塞尔曲线为基础发展而来的,其具有几何不变性、变差减小性、局部支撑性等许多优良性质,而且其是具有连续二阶导数的光滑曲线,可以很好地满足弹道曲线的特点,另一方面,由3次b样条建立的弹道曲线模型相对于多项式模型所需辨识参数的个数要少的多。
[0089]
本发明采用某次火箭发射任务时的外弹道测量数据进行实验分析,选取一台光电经纬仪和一台雷达的数据进行实验,使用两台设备11.3s~130s之间的数据,采样频率均为20hz。首先根据光
‑
雷异址定位方法得到弹道位置参数,再用三阶差分模型识别出弹道参数中的异常区域,并用3次的b样条容错模型对异常区域的数据进行修正处理,并把光
‑
雷异址定位方法与本发明方法的结果与本次任务的gps数据进行了对比。图5、图6、图7为用光
‑
雷异址定位方法以及本发明方法得到的弹道位置参数与gps弹道参数的对比图,其中依次为x方向弹道参数、y方向弹道参数、z方向弹道参数。图8、图9、图10为用光
‑
雷异址定位方法以及本发明方法得到的弹道位置参数与gps弹道参数的差值图,其中依次为x方向弹道参数差值、y方向弹道参数差值、z方向弹道参数差值。
[0090]
从图5~图10的弹道参数结果对比图与差值图可以看出,如果利用光
‑
雷异址定位方法得到的弹道参数会在25s~45s这一区域出现跃变的异常数据,但是利用本发明方法得到的弹道参数中跃变区域的数据会被明显的修正,修正后的结果向gps弹道参数大幅度靠近,此结果说明了本发明方法的正确性与可靠性。
[0091]
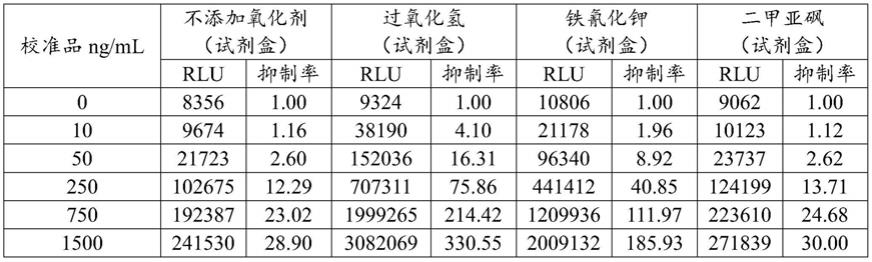
表1为用光
‑
雷异址定位方法和用本发明方法的结果与gps弹道参数的均方根误差。
[0092]
表1两种方法误差对比
[0093][0094]
从上表可看出,使用本发明方法得到的弹道参数与光
‑
雷异址定位方法得到的弹道参数误差相差较大,尤其是y方向弹道参数和z方向弹道参数的均方根误差都降低了60%以上,然而异常数据区域只有20s左右,约占整段数据时间长度的16.7%,这说明本发明方法的定位结果较光
‑
雷定位方法效果更佳。
[0095]
通过上述的仿真分析可知,本发明提出的光电经纬仪与异址雷达联合弹道容错定位方法相对于光
‑
雷异址定位方法,在测量数据中含有误差时能够更有效且更准确地定位出目标弹道参数。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。