1.本发明涉及四轮独立电驱动车,特别是一种基于四轮独立驱动电动汽车的车身稳定控制方法和系统。
背景技术:
2.随着汽车工业的发展,以及能源和环境的问题逐步出现,中国大力推广新能源汽车的发展。纯电动汽车作为新能源汽车的代表,受到越来越多消费者的关注,纯电动汽车驱动力由电机提供,有控制精度高,响应速度快的优势。目前车身稳定系统都是由单独的电控液压单元esc来进行车身稳定控制。现有esc不能在车身轻微失稳条件下进行稳定控制,响应速度慢,而且传动控制方法为液压制动控制,造成摩擦片的磨损消耗,并且产生的热能散发到大气中造成能源的损失。
技术实现要素:
3.发明目的:本发明的目的是提供一种控制精度高、响应速度快的基于四轮独立驱动电动汽车的车身稳定控制方法和系统。
4.技术方案:本发明所述的一种基于四轮独立驱动电动汽车的车身稳定控制方法,包括以下步骤:
5.(1)电动车辆配有四轮独立电机,车辆安装用于对车辆行驶工况进行监测的传感器;
6.(2)车辆行驶过程中,通过传感器对车辆行驶工况进行监测,实时采集行驶数据;
7.(3)车身稳定控制模块根据轮速和方向盘转角得到驾驶员计划行驶方向和车辆实际行驶方向;
8.(4)控制模块进行逻辑判断并发出指令;
9.(5)车身稳定控制模块将步骤(4)分析处理完成后的制动指令发给电机控制单元,电机控制单元对电机进行反扭矩制动。
10.步骤(1)中所述传感器包括加速度传感器、轮速传感器、方向盘转角传感器。
11.步骤(2)中所述行驶数据包括横向加速度信号、车辆轮速信号以及转角信号。
12.步骤(3)中所述车身稳定控制模块根据轮速和方向盘转角得到驾驶员计划行驶方向a;根据横摆角传感器和侧向加速度传感器得到车辆实际行驶方向b。
13.所述步骤(4)具体为:
14.(4.1)车辆行驶情况正常,继续行驶;
15.(4.2)转向不足,将内侧后轮电机施加再生制动抑制车辆横摆,使车辆进一步沿驾驶员转弯方向偏转,稳定车辆;
16.(4.3)转向过度,将外侧前轮电机施加再生制动,防止出现甩尾,并减弱过度转向趋势,稳定车辆。
17.步骤(4)中所述控制模块进行逻辑判断的依据为:当a=b时,车辆行驶情况正常;
当a>b,判断为转向不足;当a<b,判断为转向过度。
18.本发明所述的一种基于四轮独立驱动电动汽车的车身稳定控制系统,包括以下模块:
19.车身稳定控制模块:通过采集信号计算横摆角速度并输出控制指令给电机控制器;
20.电机控制单元:包括四个独立的电机控制器,主要控制电机的转速和扭矩。
21.一种计算机存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述的基于四轮独立驱动电动汽车的车身稳定控制方法。
22.一种计算机设备,包括储存器、处理器及存储在存储器上并可再处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述的基于四轮独立驱动电动汽车的车身稳定控制方法。
23.有益效果:与现有技术相比,本发明具有如下优点:降低制动能量消耗,提高整车行驶安全性,提高能量回收覆盖率,进而提高整车续航能力。
附图说明
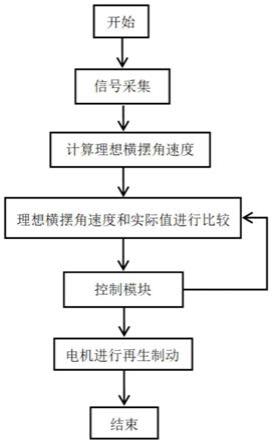
24.图1为本方法的步骤流程图。
具体实施方式
25.下面结合附图对本发明的技术方案作进一步说明。
26.实施例1:
27.如图1所示,本发明公开了一种基于四轮独立驱动电动汽车的车身稳定控制方法,包括以下步骤:
28.(1)电动车辆配有四轮独立电机,车辆安装用于对车辆行驶工况进行监测的传感器;所述传感器包括加速度传感器、轮速传感器、方向盘转角传感器;
29.(2)车辆行驶过程中,通过传感器对车辆行驶工况进行监测,实时采集行驶数据;所述行驶数据包括横向加速度信号、车辆轮速信号以及转角信号;
30.(3)车身稳定控制模块根据轮速和方向盘转角得到驾驶员计划行驶方向和车辆实际行驶方向;所述车身稳定控制模块根据轮速和方向盘转角得到驾驶员计划行驶方向a;根据横摆角传感器和侧向加速度传感器得到车辆实际行驶方向b;
31.(4)控制模块进行逻辑判断并发出指令;
32.(4.1)车辆行驶情况正常,继续行驶;
33.(4.2)转向不足,将内侧后轮电机施加再生制动抑制车辆横摆,使车辆进一步沿驾驶员转弯方向偏转,稳定车辆;
34.(4.3)转向过度,将外侧前轮电机施加再生制动,防止出现甩尾,并减弱过度转向趋势,稳定车辆。
35.(5)车身稳定控制模块将步骤(4)分析处理完成后的制动指令发给电机控制单元,电机控制单元对电机进行反扭矩制动;
36.(6)上述流程完成后车身稳定控制调节完成。
37.步骤(4)中所述控制模块进行逻辑判断的依据为:当a=b时,车辆行驶情况正常;
当a>b,判断为转向不足;当a<b,判断为转向过度。
38.实施例2:
39.本发明公开了一种基于四轮独立驱动电动汽车的车身稳定控制系统,包括以下模块:
40.车身稳定控制模块:通过采集信号计算横摆角速度并输出控制指令给电机控制器;
41.电机控制单元:四个独立的电机控制器,主要控制电机的转速和扭矩。
42.实施例3:
43.本发明公开了一种计算机存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述的基于四轮独立驱动电动汽车的车身稳定控制方法。
44.实施例4:
45.本发明公开了一种计算机设备,包括储存器、处理器及存储在存储器上并可再处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述的基于四轮独立驱动电动汽车的车身稳定控制方法。
技术特征:
1.一种基于四轮独立驱动电动汽车的车身稳定控制方法,其特征在于,包括以下步骤:(1)电动车辆配有四轮独立电机,车辆安装用于对车辆行驶工况进行监测的传感器;(2)车辆行驶过程中,通过传感器对车辆行驶工况进行监测,实时采集行驶数据;(3)车身稳定控制模块根据轮速和方向盘转角得到驾驶员计划行驶方向和车辆实际行驶方向;(4)控制模块进行逻辑判断并发出指令:(5)车身稳定控制模块将步骤(4)分析处理完成后的制动指令发给电机控制单元,电机控制单元对电机进行反扭矩制动。2.根据权利要求1所述的一种基于四轮独立驱动电动汽车的车身稳定控制方法,其特征在于,步骤(1)中所述传感器包括加速度传感器、轮速传感器、方向盘转角传感器。3.根据权利要求1所述的一种基于四轮独立驱动电动汽车的车身稳定控制方法,其特征在于,步骤(2)中所述行驶数据包括横向加速度信号、车辆轮速信号以及转角信号。4.根据权利要求1所述的一种基于四轮独立驱动电动汽车的车身稳定控制方法,其特征在于,步骤(3)中所述车身稳定控制模块根据轮速和方向盘转角得到驾驶员计划行驶方向a;根据横摆角传感器和侧向加速度传感器得到车辆实际行驶方向b。5.根据权利要求1所述的一种基于四轮独立驱动电动汽车的车身稳定控制方法,其特征在于,所述步骤(4)具体为:(4.1)车辆行驶情况正常,继续行驶;(4.2)转向不足,将内侧后轮电机施加再生制动抑制车辆横摆,使车辆进一步沿驾驶员转弯方向偏转,稳定车辆;(4.3)转向过度,将外侧前轮电机施加再生制动,防止出现甩尾,并减弱过度转向趋势,稳定车辆。6.根据权利要求1所述的一种基于四轮独立驱动电动汽车的车身稳定控制方法,其特征在于,步骤(4)中所述控制模块进行逻辑判断的依据为:当a=b时,车辆行驶情况正常;当a>b,判断为转向不足;当a<b,判断为转向过度。7.一种基于四轮独立驱动电动汽车的车身稳定控制系统,其特征在于,包括以下模块:车身稳定控制模块:通过采集信号计算横摆角速度并输出控制指令给电机控制器;电机控制单元:包括四个独立的电机控制器,主要控制电机的转速和扭矩。8.一种计算机存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现如权利要求1
‑
6中任一项所述的基于四轮独立驱动电动汽车的车身稳定控制方法。9.一种计算机设备,包括储存器、处理器及存储在存储器上并可再处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1
‑
6中任一项所述的基于四轮独立驱动电动汽车的车身稳定控制方法。
技术总结
本发明公开了一种基于四轮独立驱动电动汽车的车身稳定控制方法和系统,所述方法包括以下步骤:(1)电动车辆配有四轮独立电机,车辆安装用于对车辆行驶工况进行监测的传感器;(2)车辆行驶过程中,通过传感器对车辆行驶工况进行监测,实时采集行驶数据;(3)车身稳定控制模块根据轮速和方向盘转角得到驾驶员计划行驶方向和车辆实际行驶方向;(4)控制模块进行逻辑判断并发出指令:(5)车身稳定控制模块将制动指令发给电机控制单元,电机控制单元对电机进行反扭矩制动;本发明所述的系统包括车身稳定控制模块和电机控制单元。本发明能够降低制动能量消耗,提高整车行驶安全性,提高能量回收覆盖率,进而提高整车续航能力。进而提高整车续航能力。进而提高整车续航能力。
技术研发人员:钱川
受保护的技术使用者:的卢技术有限公司
技术研发日:2021.08.13
技术公布日:2021/11/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。