1.本发明涉及机械自动化技术领域,尤其涉及一种伺服控制丝杠传动机构。
背景技术:
2.伺服控制的丝杠传动机构在需要实现设备动作精准控制的场合具有广泛应用,典型的应用为各种飞行器的舵机。
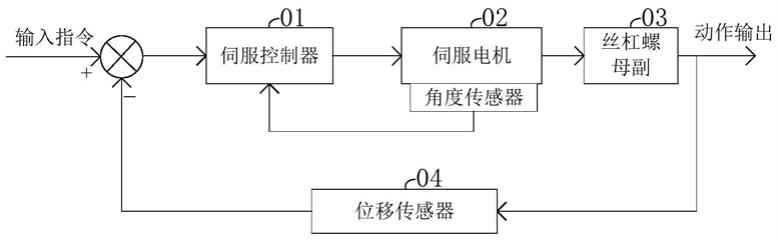
3.图1是典型的伺服控制丝杠传动机构的原理图。如图1所示,典型的伺服控制丝杠传动机构包括控制器01、伺服电机02、丝杠螺母副03和位移传感器04,伺服电机02中还包括角度传感器。在伺服控制器01接收到输入指令后,其通过角度传感器确定伺服电机02当前角度位置以及位置传感器04确定的丝杠螺母副中丝杠的伸出位置生成控制信号,控制伺服电机的动作。
4.目前,前述的伺服控制丝杠传动机构仍然使用角度传感器检测电机的位置,角度传感器的工作可靠性直接影响其安全性;另外,角度传感器等结构还增加伺服电机的尺寸,使得整个伺服控制传动结构的尺寸增加。
技术实现要素:
5.本说明书提供一种伺服控制丝杠传动装置和控制方法,简化伺服控制丝杠传动装置的结构,并能够实现伺服控制。
6.本说明书提供一种伺服控制丝杠传动装置,包括伺服电机、丝杠螺母副、直线位移式电位器和控制器;所述丝杠螺母副包括丝杠螺母和丝杠;
7.所述伺服电机用于驱动所述丝杠螺母转动,继而驱动所述丝杠相对所述丝杠螺母平移;
8.所述直线位移式电位器用于生成表示所述丝杠当前位置的反馈信号;
9.所述控制器用于根据所述反馈信号确定所述丝杠的当前位置和所述伺服电机的当前转动位置,以及根据所述当前位置、所述当前转动位置和输入指令生成控制所述伺服电机转动的控制信号。
10.可选地,所述伺服电机为环形内转子伺服电机;所述环形内转子伺服电机的环形内转子与所述丝杠螺母固定连接。
11.可选地,包括一转筒;所述转筒套设在所述丝杠的外周侧;
12.所述环形内转子固定在所述转筒上,通过所述转筒与所述丝杠螺母固定连接;所述伺服电机和所述丝杠螺母位于所述转筒的不同径向位置区域。
13.可选地,所述丝杠的轴心处设置有空腔;所述直线位移式电位器至少部分位于所述空腔内。
14.可选地,所述根据所述反馈信号确定所述丝杠的当前位置和所述伺服电机的当前转动位置,包括:
15.根据所述反馈信号确定所述丝杠的当前位置;
16.根据所述当前位置和标定位置计算位置偏差;
17.根据所述位置偏差和所述丝杠的导程计算所述伺服电机的转动角度;
18.以及,根据所述转动角度和所述标定位置对应的所述伺服电机的转动位置确定所述当前转动位置。
19.可选地,所述伺服电机的输出端和所述丝杠螺母之间设置有传动齿轮;
20.所述根据所述位置偏差和所述丝杠的导程计算所述伺服电机的转动角度,包括:
21.根据所述丝杠的转动角度和由所述传动齿轮确定的传动比计算伺服电机的转动角度。
22.可选地,所述直线式位移电位器为线性位移传感器。
23.本说明书提供一种伺服控制丝杠传动装置的控制方法,应用于伺服控制丝杠传动装置的控制器;
24.所述伺服传动装置包括伺服电机、丝杠螺母副、直线位移式电位器和控制器;所述丝杠螺母副包括丝杠螺母和丝杠;
25.所述伺服电机用于驱动所述丝杠螺母转动,继而驱动所述丝杠相对所述丝杠螺母移动;
26.所述直线位移式电位器用于生成表示所述丝杠当前位置的反馈信号;
27.所述控制方法包括:根据所述反馈信号确定所述丝杠的当前位置和所述伺服电机的当前转动位置;
28.以及根据所述当前位置、所述当前转动位置和输入指令生成控制所述伺服电机转动的控制信号。
29.可选地,所述直线位移式电位器为线性电位器;
30.根据所述反馈信号确定所述丝杠的当前位置和所述伺服电机的转动位置,包括:
31.根据所述反馈信号确定所述丝杠的当前位置;
32.根据所述当前位置和标定位置计算位置偏差;
33.根据所述位置偏差和所述丝杠的导程计算所述伺服电机的转动角度;
34.以及根据所述角度偏差和所述伺服电机在标定位置对应的所述伺服电机的转动位置确定所述当前转动位置。
35.可选地,所述伺服电机的输出端和所述丝杠螺母之间设置有传动齿轮;
36.所根据所述位置偏差和所述丝杠的导程计算所述伺服电机的转动角度,包括:根据所述位置偏差和所述丝杠的导程计算所述丝杠的转动角度;
37.根据所述丝杠的转动角度和由所述传动齿轮确定的传动比计算伺服电机的转动角度。
38.相对于现有技术中的伺服控制丝杠传动装置,本说明书提供的伺服控制丝杠传动装置仅使用直线位移式电位器即实现了丝杠当前位置和伺服电机当前转动位置的确定,无需在伺服电机中设置专门的角度检测传感器。因无需设置转动的角度检测传感器,所以伺服电机的结构可以简化。角度检测传感器具有检测精度高等特点,在丝杠传动机构具有较好的传动精度时,采用角度检测传感器即可以实现丝杠当前位置和伺服电机当前转动位置的精确测量。而因为取消了伺服电机中的角度传感器,还可以减少因为角度传感器出现问题造成的传动装置故障。
39.本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
40.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
41.图1是典型的伺服控制丝杠传动机构的原理图;
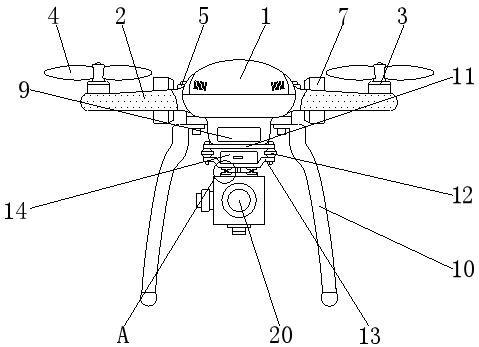
42.图2是实施例提供的伺服控制丝杠传动装置的结构示意图;
43.图3是伺服控制传动装置的部分组件剖面示意图;
44.图4是实施例提供的丝杠传动装置确定伺服电机当前位置的流程图;
45.图5是实施例提供的控制方法的流程图;
46.图1中:01-控制器,02-伺服电机,03-丝杠螺母副,04位移传感器;图2-图3:中:11-伺服电机,10-丝杠螺母副,12-丝杠螺母,13-丝杠,14-直线位移式电位器,15-控制器,16-前端盖,17-外壳,18-后端盖,19-轴承,20-定位套筒,21-转筒。
具体实施方式
47.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
48.本说明书实施例提供一种伺服控制传动装置。图2是实施例提供的伺服控制丝杠13传动装置的结构示意图,图3是伺服控制传动装置的部分组件剖面示意图。如图2和图3所示,本实施例中,伺服控制丝杠13传动装置包括伺服电机11、丝杠螺母12丝杠螺母副10、直线位移式电位器14和控制器15;丝杠螺母副10包括丝杠13和丝杠螺母12。
49.应当注意的是,本实施例中的伺服电机11中的涵义是其可以通过闭环实现伺服反馈控制的电机,但是其并不包括常规伺服电机中具有的检测电机转动角度的角度传感器。
50.当然,伺服控制丝杠13传动机构还包括用于实现设备一体化的前端盖16、外壳17和后端盖18,用于减少摩擦的轴承19,以及实现相关部件定位的定位套筒20。因为此类部件并不是本发明实施例的核心发明点,因此下文不再对其展开描述;相应的技术内容可以参见相关技术文献。
51.伺服电机11的输出端与丝杠螺母12连接,用于驱动丝杠螺母12的转动,继而驱动丝杠13相对于丝杠螺母12平移,使得丝杠13执行控制动作。直线位移式电位器14至少部分与丝杠13固定连接;直线位移式电位器14用于检测丝杠13的当前位置,并生成表示丝杠13当前位置的反馈信号。
52.控制器15与伺服电机11和直线位移式点位器的输出端均连接,其用于接收直线位移式电位器14生成的反馈信号,根据反馈信号确定丝杠13的当前位置和伺服电机11的当前转动位置,并根据丝杠13的当前位置、伺服电机11的当前转动位置和输入指令生成控制伺服电机11转动的控制信号。
53.具体的,控制器15根据丝杠13当前位置和控制指令确定伺服电机11的转动方向和
转动量,根据伺服电机11的当前转动位置确定给伺服电机11的哪些绕组通电以使得其能够合理地实现转动。
54.根据前述连接关系可知,在伺服电机11转动过程中,丝杠13随之相对丝杠螺母12移动,并且伺服电机11转动过程中的各个当前转动角度分别对应至少一个丝杠13的当前位置;反之,在丝杠13的当前位置确定的情况下,可以根据丝杠13的当前位置反向地确定伺服电机11的当前位置,继而确定怎样生成控制伺服电机11转动的控制信号。
55.相对于现有技术中的伺服控制丝杠13传动装置,本实施例提供的伺服控制丝杠13传动装置仅使用直线位移式电位器14即实现了丝杠13当前位置和伺服电机11当前转动位置的确定,无需在伺服电机11中设置专门的角度检测传感器。因无需设置角度检测传感器,所以伺服电机11的结构可以简化。而因为取消了伺服电机11中的角度传感器,还可以减少因为角度传感器出现问题造成的传动装置故障。
56.电位器具有检测精度高等特点,在丝杠13传动机构具有较好的传动精度时,采用电位器即可以实现丝杠13当前位置和伺服电机11当前转动位置的精确测量。
57.如图3所示,本实施例中的伺服电机11为一环形内转子伺服电机。内转子伺服电机11的环形内转子和丝杠螺母12固定连接,其可以直接套设在丝杠13的外周面侧。如此,可以降低伺服控制丝杠13传动装置的结构体积,使得传动装置尽可能安装在体积严格限定的设备上(诸如导弹设备)。当然,在其他实施例中,伺服电机11为内转子的情况下,其也可以采用类似常规的内转子伺服电机11;或者,伺服电机11可以采用外转子电机11。
58.请继续参见图3,本实施例中的装置还包括一转筒21,转筒21套设在丝杠13的外周侧。内转子伺服电机11固定在转筒21的外周侧,通过转筒21与丝杠螺母12固定连接。为了尽可能地减小传动装置的直径尺寸,本实施例中伺服电机11和丝杠螺母12位于转筒21的不同径向位置区域。
59.本实施例中,伺服电机11为采用了无刷直流伺服电机11。其他实施例中,伺服电机11也可以采用其他类型的电机,只要能够满足前述的控制方式即可,本发明并不做特别地限定。
60.本实施例中,为保证良好的传动精度,提高传动效率,丝杠螺母副10优选采用滚珠丝杠螺母副。
61.请继续参见图3,本实施例中,为了进一步地减小传动装置的结构。丝杠螺母副10的丝杠13的轴心处设置有空腔。前述的直线位移式电位器14设置在空腔内,用于检测丝杠13的当前位置。在其他实施例中,直线位移式传感器也可以设置在丝杠13的外侧。
62.图4是实施例提供的丝杠13传动装置确定伺服电机当前位置的流程图,此流程图表示的控制方法用于控制器15。如图4所示,控制方法包括步骤s101-s104。
63.s101:根据反馈信号确定丝杠的当前位置。
64.本实施例中具体应用中,在获得丝杠13当前位置对应的反馈信号后,根据标定位置处(一特定丝杠位置)对应的信号可以快速的计算出丝杠13的当前位置。当然,在其他实施例中,控制器15也可以利用查找表方式,通过反馈信号直接查找查找表确定丝杠13的当前位置。
65.s102:根据丝杠的当前位置和标定位置计算位置偏差。
66.当前位置采用l表示,标定位置采用l0表示,则位置偏差为l-l0。
67.s103:根据位置偏差和丝杠的导程计算伺服电机的转动角度。
68.本实施例中,丝杠13平移一个导程d时,其对应的转动角度为2π。在前述位置偏差确定的情况下,对应的伺服电机11的转动角度可以采用计算得到。当然,前述的计算方法考虑直接使得伺服电机11的输出端和丝杠螺母12直接固定连接的情况。在其他实施例中,如果在伺服电机11的输出端和丝杠螺母12之间设置有传动齿轮,可以根据传动齿轮的传动比和前述的θ计算出伺服电机11的转动角度。
69.s104:根据转动角度和标定位置处对应的伺服电机的转动位置确定当前转动位置。
70.例如,标定位置处伺服电机11的转动位置为θ0,则当前转动位置为θ0 θ;根据当前转动位置即可以确定应当如何使伺服电机11的绕组通电而使得伺服电机11转动。
71.在其他实施例中,控制器15也可以利用查找表方式,通过反馈信号直接查找查找表确定伺服电机11的当前位置。
72.本实施例中,直线式位移电位器优选采用线性电位器;当然,在其他实施例中,也可以采用非线性点位器。
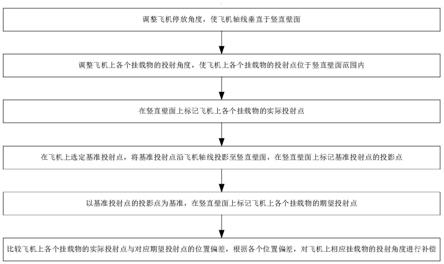
73.除了提供前述的伺服控制传动装置外,本说明书实施例还提供一种前述装置的控制方法。控制方法应用于前述的传动装置中的控制器15中。图5是实施例提供的控制方法的流程图;如图5所示,控制方法包括步骤s201-s202。
74.s201:根据反馈信号确定丝杠的当前位置和伺服电机的当前转动位置。
75.具体应用中,步骤s201可以采用前述的s101-s104中体积的步骤确定丝杠13的当前位置和伺服电机11的当前转动位置。
76.s202:根据当前位置、当前转动位置和输入指令生成控制伺服电机转动的控制信号。
77.在确定丝杠13的当前位置后,并通过输入指令确定丝杠13需要达到的位置后,控制器15可以确定伺服电机11的转动方向。随后,控制器15根据前述的转动方向和伺服电机11的当前转动位置确定生成控制伺服电机11绕组通电的控制信号,继而控制伺服电机11转动。
78.以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。