1.本发明属于海洋光学测量领域,特别涉及该领域中的一种自主浮沉式海洋光学环境光场剖面测量系统。
背景技术:
2.海洋光学是研究海洋的光学性质、光在海洋中的传播规律和运用光学技术探测海洋的实验性科学,海洋光学的发展离不开现场测量技术的更新和进步。太阳光入射海洋后,与海水组分(包括海水分子和海洋粒子)相互作用(吸收或散射),产生水下光谱辐射场。水下剖面辐射场的现场测量是光学遥感探测海洋的主要信息来源,是建立光学海洋遥感模型的重要依据,亦是海洋水色遥感数据产品校正和真实性检验的基础。
3.目前海水剖面辐射测量系统根据其搭载平台可分为船载、锚系浮标和bgc
‑
argo浮标测量,bgc
‑
argo中bgc是“biogrochemical”的缩写,中文含义是“生物地球化学”,argo是“array for real
‑
time geostrophic oceanography”的缩写,中文含义是“实时海洋参数测量阵列”,即通过向海洋里面投放很多浮标,可以快速准确测量海洋剖面参数。船载测量系统通常把海洋辐射计以绞车或自由落体光学平台作为载体进行剖面辐射测量。因此,船载测量系统依赖于科考船,只能进行大面站(点)观测,无法进行长期连续(面)观测;而且费时、费力、费用高。基于锚系浮标海洋光学辐射测量系统,比如美国宇航局管理和运营的海洋光学浮标moby和欧空局管理和运营的海洋光学浮标boussole,两者均在固定海域表层固定深度(<10米)进行海洋光学辐射测量,无法进行剖面测量也无法在其他海域进行测量。近年来,海洋辐射计安装在bgc
‑
argo浮标上,利用bgc
‑
argo浮标上浮和下潜测量海洋剖面辐射。但bgc
‑
argo浮标存储电能有限且考虑到长期观测(>2年),观测周期通常较长(>10天),无法捕获短期内海洋辐射或生物地球化学参数的变化;此外,bgg
‑
argo浮标下潜深度较深(>1000米)而海洋光学辐射变化一般只在海水的真光层内(<200米)。因此,上述无论是基于科考船、锚系浮标和bgc
‑
argo浮标的海洋光学辐射剖面测量系统均有其固有的缺点,不能实现海洋剖面辐射的长期、高频移动测量。
技术实现要素:
4.本发明所要解决的技术问题就是提供一种自主浮沉式海洋光学环境光场剖面测量系统。
5.本发明采用如下技术方案:一种自主浮沉式海洋光学环境光场剖面测量系统,其改进之处在于:包括漂浮在海面上的浮球,在浮球上安装重力姿态稳定装置、北斗通信终端和与北斗通信终端电连接的感应耦合数据接收单元,在重力姿态稳定装置上安装海洋光谱辐照度计;包塑钢缆的一端安装在浮球底部,另一端悬挂张紧锤,在包塑钢缆上临近浮球处安装上阻尼器,临近张紧锤处安装下阻尼器,在上、下阻尼器之间安装可沿包塑钢缆上下滑动的升降平台,在升降平台的顶部和底部分别安装余弦采集器和gershun管,在升降平台上安装水下感应耦合数据
传输单元,地磁姿态传感器和压力传感器,水下感应耦合数据传输单元通过包塑钢缆与上述的感应耦合数据接收单元连接通信,此外还在升降平台上设置两个密封舱,每个密封舱均包含电池、光谱仪和控制单元,一个密封舱的光谱仪与上述的余弦采集器连接通信,另一个密封舱的光谱仪与上述的gershun管连接通信,控制单元与其所在密封舱内的光谱仪及升降平台上的水下感应耦合数据传输单元,地磁姿态传感器和压力传感器连接通信,电池为其所在密封舱内的控制单元和光谱仪供电。
6.进一步的,重力姿态稳定装置和北斗通信终端安装在浮球顶部,感应耦合数据接收单元安装在浮球底部。
7.进一步的,在升降平台的顶部安装上连接杆,余弦采集器固定安装在上连接杆的端部。
8.进一步的,在升降平台的底部安装下连接杆,gershun管固定安装在下连接杆的端部。
9.进一步的,下连接杆的长度大于升降平台的高度。
10.本发明的有益效果是:本发明所公开的剖面测量系统,升降平台基于波浪动能沿包塑钢缆上下滑动,不消耗额外能量,可布放在大洋中进行长期观测。观测深度可根据研究海域定制,剖面速度约为10米/分钟,可实现高频剖面观测,在白天测量100米深度时,可测量25个剖面。集成姿态传感器,对观测数据进行阴影校正,提供高质量观测数据。采用感应耦合数据传输单元进行跨介质数据传输,实时传输测量数据。
附图说明
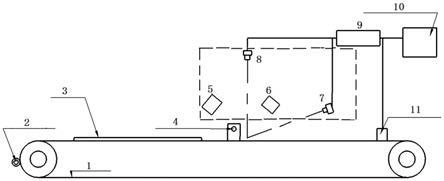
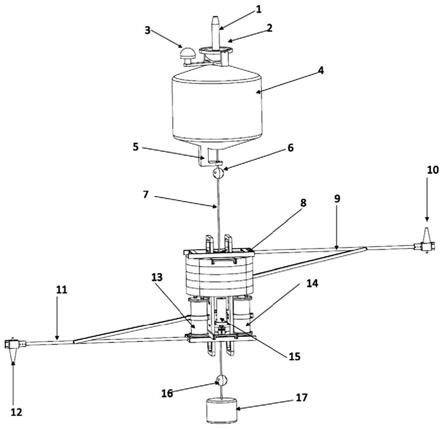
11.图1是本发明实施例1所公开剖面测量系统的结构示意图;图2是本发明实施例1所公开剖面测量系统的阴影位置示意图。
12.附图标记:1、海洋光谱辐照度计;2、重力姿态稳定装置;3、北斗通信终端;4、浮球;5、感应耦合数据接收单元;6、上阻尼器;7、包塑钢缆;8、升降平台;9、上连接杆;10、余弦采集器;11、下连接杆;12、gershun管;13、密封舱a;14、密封舱b;15、水下感应耦合数据传输单元;16、下阻尼器;17、张紧锤。
具体实施方式
13.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
14.实施例1,如图1所示,本实施例公开了一种自主浮沉式海洋光学环境光场剖面测量系统,包括漂浮在海面上的浮球4,在浮球上安装重力姿态稳定装置2、北斗通信终端3和与北斗通信终端电连接的感应耦合数据接收单元5,在重力姿态稳定装置上安装海洋光谱辐照度计1,用于测量海面向下辐照度,重力姿态稳定装置用于稳定海洋光谱辐照度计使之保持直立状态;包塑钢缆7的一端安装在浮球底部,另一端悬挂张紧锤17,在包塑钢缆上临近浮球处安装上阻尼器6,临近张紧锤处安装下阻尼器16,在上、下阻尼器之间安装可沿包塑钢缆上下滑动的升降平台8,升降平台与包塑钢缆单向耦合连接,包塑钢缆是升降平台上
下运动时的骑行通道,之所以包塑处理,一方面可保证与升降平台内的单向装置耦合得更紧密,另一方面为下述水下感应耦合数据传输单元提供数据传输通道。在升降平台的顶部和底部分别安装余弦采集器10和gershun管12,gershun管也称gershun管套件,用于控制一个海洋光学的端口光纤或一个光谱仪的入射孔径,属于光学测量领域现有技术,详细可见网页https://www.antpedia.com/news/69/n
‑
2221569.html。在升降平台上安装水下感应耦合数据传输单元15,地磁姿态传感器和压力传感器,水下感应耦合数据传输单元通过包塑钢缆与上述的感应耦合数据接收单元连接通信,此外还在升降平台上设置密封舱a13密封舱b14,每个密封舱均包含电池、光谱仪和控制单元,密封舱b的光谱仪与上述的余弦采集器连接通信,密封舱a的光谱仪与上述的gershun管连接通信,控制单元与其所在密封舱内的光谱仪及升降平台上的水下感应耦合数据传输单元,地磁姿态传感器和压力传感器连接通信,电池为其所在密封舱内的控制单元和光谱仪供电。
15.北斗通信终端功能为卫星通信并实时传输测量数据。
16.由浮球、包塑钢缆、上阻尼块、升降平台、下阻尼块和张紧锤组成动力系统。浮球漂浮在海表面,在海浪作用下上下运动为系统提供动力,升降平台在上阻尼块与下阻尼块之间的包塑钢缆上进行自主下潜和上升运动。通过调节配重,升降平台上升速度可控制在0.2
‑
0.5m/s,从而实现对海洋剖面辐射的高频测量。此外,升降平台下降依靠浮球提供的波浪动能,具备长期工作优势。
17.由感应耦合数据接收单元(hem)和水下感应耦合数据传输单元(ssm)组成数据传输系统,ssm通过包塑钢缆与水面hem通信,然后通过北斗终端无线传输数据。
18.余弦采集器和gershun管均固定在升降平台上,在升降平台的匀速上升阶段测量海洋剖面辐射。余弦采集器通过光纤和一个密封舱内的光谱仪连接,用于测量海水剖面辐照度;gershun管通过光纤和另一个密封舱内的光谱仪连接,用于测量海水剖面辐亮度。
19.地磁姿态传感器提供升降平台的倾斜角和方位角,用于海洋辐照度和辐亮度数据的阴影校正和数据控制。压力传感器提供升降平台的深度数据,用于海洋辐射计工作触发和后数据处理。
20.在本实施例中,重力姿态稳定装置和北斗通信终端安装在浮球顶部,感应耦合数据接收单元安装在浮球底部。在升降平台的顶部安装上连接杆9,余弦采集器10固定安装在上连接杆的端部。在升降平台的底部安装下连接杆11,gershun管12固定安装在下连接杆的端部。下连接杆的长度大于升降平台的高度。上、下连接杆的外伸距离由几何光学计算得到,避免升降平台的阴影影响测量结果。
21.本实施例所公开的自主浮沉式海洋光学环境光场剖面测量系统可长期布放在大洋,在波浪动力作用下将升降平台下潜到张紧锤处,然后升降平台匀速上升,在上升过程中同步测量海洋向下光谱辐照度和向上光谱辐亮度。在升降平台上升到海面附近,辐射计停止工作,ssm通过感应耦合上传数据到hem,随后升降平台在波浪能作用下开始下潜,重复下一个剖面测量周期。升降平台的实现方式参见申请号为201811475281.0的发明专利申请中的浮标平台。
22.该剖面测量系统具备长期和高频观测优势,可满足海洋光学剖面辐射业务化观测需求,服务于光学海洋学研究以及海洋水色遥感产品校正和真实性检验研究。
23.本实施例还公开可一种数据处理方法,用于处理上述剖面测量系统测得的数据,
包括如下步骤:步骤1,深度偏移校正,利用压力传感器测量压力数据及其与gershun管和余弦采集器的垂直距离,计算辐亮度和辐照度测量的深度数据;步骤2,质量控制,利用地磁姿态传感器记录升降平台倾角数据,去除倾角大于5
°
的数据;步骤3,阴影校正,根据地磁姿态传感器记录gershun管和余弦采集器方位角,计算是否在浮球阴影中,若是,则根据下式(1)—(3)计算阴影校正因子,并利用下式(4)进行校正,如图2所示,升降平台离海面高度和上、下连接杆长度设计要尽量避免浮球和升降平台对辐亮度测量影响。基于monte
‑
carlo模拟,浮体阴影对辐亮度测量的影响表示为
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)其中,为阴影校正因子,n为海水折射率,为太阳在空气中的折射角,为太阳在水中折射角,a为吸收系数,r0为浮球半径,z0为上连接杆距离水面距离, 为深度z处测量的上行辐亮度,为阴影校正后的上行辐亮度;圆柱形升降平台对辐照度测量没有影响,但会影响上行辐亮度测量。圆柱形升降平台的阴影随太阳高度角改变,下连接杆l1长度应该足够长以避免落在圆柱升降平台的阴影中。海洋光学辐射测量一般在太阳天顶角<70
°
下进行,此时下连接杆为最长,满足
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)其中,为下连接杆长度,为圆柱形升降平台的高度,为太阳在水中折射角。在太阳天顶角为70
°
时,由公式(4)可得到。因此,下连接杆长度需大于圆柱形升降平台。
24.步骤4,漫射衰减系数计算,根据质量控制后辐照度和辐亮度剖面测量数据及其对应深度数据,利用最小二乘法分别计算上行辐亮度漫射衰减系数k
lu
和下行辐照度漫射衰减系数k
ed
;步骤5,基于步骤4计算的k
lu
和k
ed
,计算恰在水面下上行辐亮度l
u
(0
‑
)和下行辐照度e
d
(0
‑
)以及水下遥感反射比r
rs
;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
步骤6,计算海面遥感反射比r
rs
,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)其中,是辐亮度由水下表面至水上表面透过率,是辐照度由水上表面至水下表面透过率,为水
‑
空气内反射系数。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。