1.本实用新型涉及水位预测领域,具体为一种测量水位波动对通江湖泊底栖动物栖息地水动力影响的装置。
背景技术:
2.水资源是生态环境中的重要资源,为保持通江湖泊生态环境的健康稳定,对水环境进行检测和调节管理十分重要,不可或缺。水中的微生物、鱼类、水生植物、底栖动物等的生存都需要适宜的水环境,一旦水环境发生变化,就会对水中生物的生存状态造成影响。梯级水库的修建,水利水电技术的不断发展进步,虽然让水资源得到了充分的利用,如通航、发电、防洪等,但是却忽视了水中生物的适宜生境。其中,通江湖泊的底栖动物是河流生态系统重要的生物类群,其组成与分布受河流水动力条件影响显著。
3.底栖动物在河流纵向上展现出了明显的分布特征:底栖动物的物种数量及组成与底质的稳定性、河流含沙量、降水量等因素相关。其中水动力条件中的底质、含沙量及流速对底栖动物的影响最为显著。因此,通江湖泊底栖动物对水深和流速十分敏感,一旦水位和流速发生变化,就会对底栖动物的食物数量和质量产生影响,不仅会改变底栖动物栖息的微生境,还会影响其取食效率。当水位波动的范围超过通江湖泊底栖动物的适应范围时,会迫使其栖息地改变,影响湿地生态平衡,甚至会严重影响种群的稳定性。
4.但是,目前缺少一种针对通江湖泊同时测量水深和底部流速的先进调控设备。如杨正丽(专利号cn111811610a)实用新型了一种水利工程测量装置,但仅仅只针对水深的测量,考虑的因素较为单一,陶进(专利号cn110988377a)实用新型了一种高频震动工况下的流速检测仪,但是适用条件比较小,仅适用于小型管道,龚志安(专利号cn212134728u)实用新型了一种水利工程流速检测设备,但由于设备是固定的,仅能测试某个固定点的数据,所得数据不具有代表性。因此,需要一种测量水位波动对通江湖泊底栖动物栖息地水动力影响的装置,及时的同时对水位和流速的变化进行检测来解决上述问题,为维护生态多样性做出重要的贡献。
技术实现要素:
5.本实用新型的目的是在于提供一种测量水位波动对通江湖泊底栖动物栖息地水动力影响的装置,以解决上述背景技术中提出的问题。
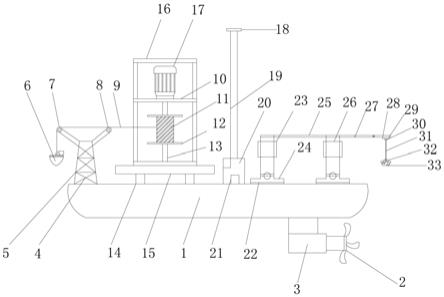
6.为了实现上述的技术特征,本实用新型的目的是这样实现的:一种测量水位波动对通江湖泊底栖动物栖息地水动力影响的装置,它包括船体,所述船体上安装有用于控制整个船体移动的动力装置,所述船体的顶部一侧安装有用于测量水深的水深测量装置;所述船体的中间部位安装有控制间,所述控制间的内部设置有搜集和反馈数据的数据采集处理模块;所述船体的顶部并位于水深测量装置的另一侧安装有流量测量装置。
7.所述动力装置包括安装在船体底部的驱动桨轮,所述驱动桨轮与用于驱动其转动
的桨动力仪相连,所述驱动桨轮与设置在船体上的舵杆相连,所述舵杆穿过设置在船体上的舵孔,所述舵杆顶端安装有船舵,并控制船体的移动方向;所述船体上安装有gps定位装置,gps定位装置采用百通记录仪,能够智能实时传输定位,拍摄视频,实现实时观看。
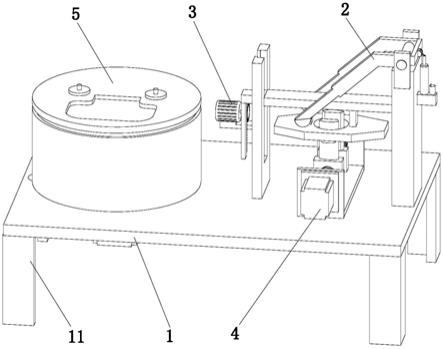
8.所述水深测量装置包括固定在船体顶部的支撑件,所述支撑件的顶部固定有减震板,所述减震板的顶部固定有防护壳,所述防护壳的内部安装有重锤线收放机构,所述重锤线收放机构上缠绕有重锤线,所述重锤线的另一端绕过轮架机构,并在其末端连接重锤;所述重锤线收放机构上安装有用于测量重锤线长度的计米器。
9.所述重锤线收放机构包括固定在防护壳内部的安装隔板,所述安装隔板的顶部固定有电动机,所述电动机的输出轴安装有驱动盘,所述驱动盘之间安装有线轮,所述线轮上缠绕有重锤线。
10.所述轮架机构包括固定在船体顶部的支撑条,所述支撑条之间通过连接螺栓连接成为桁架结构,在桁架结构的顶部通过支撑杆对称安装有第一滑轮和第二滑轮,所述重锤线依次绕过第一滑轮和第二滑轮。
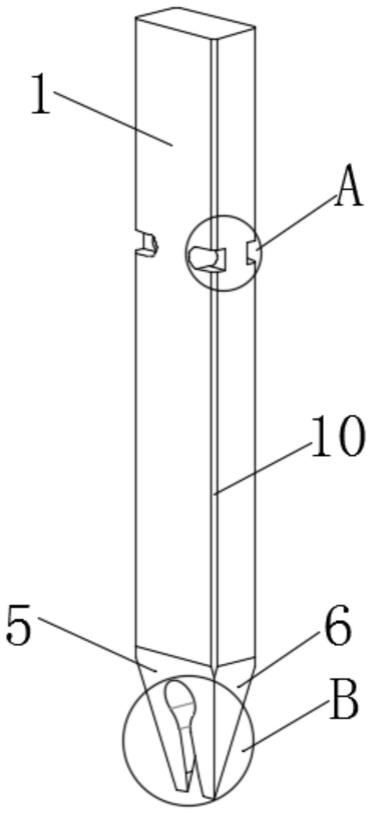
11.所述重锤的上端通过套环安装有压力传感器,在重锤的顶部安装有电磁阀,当重锤达到水底时压力传感器进行感应触动电磁阀,然后反馈给计米器,计米器通过led面板显示读数;
12.所述计米器通过无线与控制间的数据采集处理模块进行数据传输,使得水深检测数据能够通过5g快速传输实时监控。
13.所述重锤包括锥形结构的铅块,所述铅块的外部设置有黄铜层。
14.所述控制间的顶部固定安装有监控杆,所述监控杆的顶部安装有太阳能板及监控装置,所述太阳能板及监控装置包括监控支架,所述监控支架上通过监控支架螺栓固定安装有高清摄像头,所述监控支架上安装有太阳能板支架,所述太阳能板支架上安装有太阳能板;太阳能板为需电设备提供电能,高清摄像头能够360
°
旋转,并实时监控船上的装置的情况,监测数据能够通过5g快速传输。
15.所述流量测量装置包括固定在船体顶部的加固垫板,所述加固垫板的顶部平行固定有分别采用伸缩套筒依次相连的第一伸缩柱和第二伸缩柱,所述第一伸缩柱和第二伸缩柱的顶部安装有横向伸缩板,所述横向伸缩板上安装有伸缩节,所述伸缩节的另一端安装有凹轨,所述凹轨上转动安装有转向轮,所述转向轮的底端通过卡扣安装有监测臂,所述监测臂的底端安装有抓斗,所述抓斗上安装有光学测量装置。
16.本实用新型有如下有益效果:
17.1、通过采用本实用新型的装置,能够用于对水体的水深进行自动监测,通过重锤线收放机构、重锤线、计米器和测量重锤的组合结构,通过对重锤线轮的卷绕和收放,有效的保障了对重锤线末端测量重锤的收放,结合计米器对收放重锤线的测量,有效的测量出放入水中重锤线的长度,从而测量出水深。
18.2、通过重锤线收放机构和轨迹测量机构的组合结构,在测量重锤下放到达水底后,加速度传感器配合滑动套设在重锤线上的滑动套筒,沿着重锤线向下运行,实现对重锤线轨迹的测量,配合显示出重锤线在入水后的延展与分布,配合对重锤线的计米,电脑绘制出重锤线的痕迹,配合对加速度传感器测量的运动里程的计算,以及重锤线的计米,有效的综合保证对水深测量。
19.3、本实用新型提出一种通过偏振
‑
光学感应测量水体地区的悬浮物质的偏振数据和图像,获得颗粒物的物理结构和色素荧光信息,从而实现对悬浮物质通量的测量。其中通过光学感应装置和感光相机以及水体截面内的多个悬浮颗粒的偏振散射特性和激发荧光特性,确定水体内的颗粒、数量、分类信息等,从而快速的识别水体悬浮物的运动。
20.4、由于其他河底的状况复杂,所以常规的测量方法可能存在较大的误差,相比较其他方法,本实用新型通过不同悬浮物质对不同光源成像不相同,从而接收片光源所照亮的水体界面内多个颗粒的散射光,并且同步获得偏振数据和图像,利用偏振了解颗粒的内部结构,通过激发荧光特征了解悬浮物质的色素信息等,极大的实现了水体悬浮物质的测量效率,同时也极大的提高了识别的准确性。并且环保,经济,对于生态环评,环境检测具有重要意义。
21.5、通过采用本实用新型的装置,能够用于对水体的悬浮物质进行自动监测,从而测得通江湖泊的流量值。对通江湖泊底栖动物的取食具有重要意义。
附图说明
22.下面结合附图和实施例对本实用新型作进一步说明。
23.图1是本实用新型是整体示意图。
24.图2是本实用新型太阳能板及监控示意图。
25.图3是本实用新型重锤详图。
26.图4是本实用新型利用光学方法测量悬浮物质流程图。
27.图5是本实用新型测量系统的结构框图。
28.图6是本实用新型水深
‑
流量数据图。
29.图中:1船体、2桨动力仪、3驱动桨轮、4支撑条、5连接螺栓、6重锤、7第一滑轮、8第二滑轮、9重锤线、10安装隔板、11线轮、12驱动盘、13计米器、14支撑件、15减震板、16防护壳、17电动机、18太阳能板及监控装置、19监控杆、20控制间、21数据采集处理模块、22加固垫板、23第一伸缩柱、24第二伸缩柱、25横向伸缩板、26伸缩套筒、27伸缩节、28凹轨、29转向轮、30卡扣、31监测臂、32抓斗、33光学测量装置、34监控支架螺栓、35高清摄像头、36监控支架、37太阳能板、38太阳能板支架、39环套、40压力传感器、41电磁阀、42铅块、43黄铜层。
具体实施方式
30.下面结合附图对本实用新型的实施方式做进一步的说明。
31.实施例1:
32.参见图1
‑
6,一种测量水位波动对通江湖泊底栖动物栖息地水动力影响的装置,它包括船体1,所述船体1上安装有用于控制整个船体移动的动力装置,所述船体1的顶部一侧安装有用于测量水深的水深测量装置;所述船体1的中间部位安装有控制间20,所述控制间20的内部设置有搜集和反馈数据的数据采集处理模块21;所述船体1的顶部并位于水深测量装置的另一侧安装有流量测量装置。通过采用本实用新型的装置能够用于测量通江湖泊水深和流量的测量,进而对水动力环境进行测量。其流量测量装置利用光学原理对湖泊底部的流速进行实时测量;所述水深测量装置、流量测量装置安装在船上可以随时随地移动进行测量,突破了只能测量某一点或某一固定断面的特点,具有结构简单、操作方便、共享
效率高等优点;能很好的测量通江湖泊的实时流速和水深,为底栖动物的生存提供适应生境。
33.进一步的,本实用新型用于某通江湖泊,为了便于仪器随时随地的测量水深和流量,因此船体1要承受较大的风浪冲击和交变负荷。为了保证船体的强度、稳定性、浮性和不沉性,船体的材料采用优质碳素钢。
34.进一步的,所述动力装置包括安装在船体1底部的驱动桨轮3,所述驱动桨轮3与用于驱动其转动的桨动力仪2相连,所述驱动桨轮3与设置在船体1上的舵杆相连,所述舵杆穿过设置在船体1上的舵孔,所述舵杆顶端安装有船舵,并控制船体1的移动方向;所述船体1上安装有gps定位装置,gps定位装置采用百通记录仪,能够智能实时传输定位,拍摄视频,实现实时观看。通过上述的动力装置能够用于驱动船体1的行走,并通过gps定位装置确定船的具体位置。工作过程中,通过桨动力仪2带动驱动桨轮3,进而通过驱动桨轮3推动船体1运行。
35.进一步的,所述水深测量装置包括固定在船体1顶部的支撑件14,所述支撑件14的顶部固定有减震板15,所述减震板15的顶部固定有防护壳16,所述防护壳16的内部安装有重锤线收放机构,所述重锤线收放机构上缠绕有重锤线9,所述重锤线9的另一端绕过轮架机构,并在其末端连接重锤6;所述重锤线收放机构上安装有用于测量重锤线9长度的计米器13。
36.进一步的,所述重锤线收放机构包括固定在防护壳16内部的安装隔板10,所述安装隔板10的顶部固定有电动机17,所述电动机17的输出轴安装有驱动盘12,所述驱动盘12之间安装有线轮11,所述线轮11上缠绕有重锤线9。为了减少发电机和线轮的噪音,在支撑件上安装减震板,支撑件厚度设置3
‑
5cm。防护壳的右侧有一个孔,重锤线通过该孔连接线轮和滑轮。防护壳的材质也采用钢材。
37.进一步的,所述轮架机构包括固定在船体1顶部的支撑条4,所述支撑条4之间通过连接螺栓5连接成为桁架结构,在桁架结构的顶部通过支撑杆对称安装有第一滑轮7和第二滑轮8,所述重锤线9依次绕过第一滑轮7和第二滑轮8。通过将支撑条与支撑条之间利用三角形具有稳定性的原理,按照三角形的形状,采用螺栓进行连接。固定支架的底部采用焊接的方式与船面相连,以保证固定支架的牢固性。第一滑轮7和第二滑轮8构成v型结构。
38.进一步的,所述重锤6的上端通过套环39安装有压力传感器40,在重锤6的顶部安装有电磁阀41,当重锤6达到水底时压力传感器40进行感应触动电磁阀41,然后反馈给计米器13,计米器13通过led面板显示读数。为了保证重锤成功的进入水底,在重锤上部安装环套,环套内圈与重锤外相连接,在环套的上端安装压力传感器。为了实时探测重锤在水体深度,在压力传感器的左边安装电池阀。
39.进一步的,所述计米器13通过无线与控制间20的数据采集处理模块21进行数据传输,使得水深检测数据能够通过5g快速传输实时监控。所述记米器为高精度电子数字自动感应计米器,屏幕为led数显屏,面板的规格为72mm*72mm,读数的精度可以精确到毫米。计米器也是通过太阳能电池板进行供电。
40.进一步的,本实施例中,如图1所示,所述重锤线收放机构包括安装在工作盘上端且开口侧朝向伸缩托架的线轮防护套,且线轮防护套的内部竖向转动安装有重锤线轮,重锤线轮的下轴端延伸至工作盘外腔并安装在电动机的输出端上,电动机安装在安装隔板的
底壁上,重锤线轮上卷绕有重锤线,且重锤线位于线轮防护套上,线轮防护套内腔上还套设有理线组件,电动机启动,通过对重锤线轮的卷绕和收放,保证重锤线末端测量重锤的收放,结合滚轮高精度电子数字自动感应计米器对收放重锤线的测量,有效的测量出放入水中重锤线的长度,从而测量出水深,再结合理线组件,有效的保证了对重锤线的线路整理,从而实现重锤线和测量重锤配合重锤线轮的卷绕和收放进行测量和回收。
41.进一步的,所述重锤6包括锥形结构的铅块42,所述铅块42的外部设置有黄铜层43。由于重锤长期浸泡在水中,为了提高其耐腐蚀性,重锤外部采用黄铜材质,里面包含铅块。
42.进一步的,所述控制间20的顶部固定安装有监控杆19,所述监控杆19的顶部安装有太阳能板及监控装置18,所述太阳能板及监控装置18包括监控支架36,所述监控支架36上通过监控支架螺栓34固定安装有高清摄像头35,所述监控支架36上安装有太阳能板支架38,所述太阳能板支架38上安装有太阳能板37;太阳能板为需电设备提供电能,高清摄像头35能够360
°
旋转,并实时监控船上的装置的情况,监测数据能够通过5g快速传输。
43.进一步的,控制间的右侧设置一扇们,方便工作人员在机器出现故障时进行检修。所有的数据采集系统和数据处理系统均通过5g实时传输至后台。
44.进一步的,在本实例中,控制间的对面设置太阳能电池板和监控装置。太阳能板的发电方式为光
‑
电直接转换。该太阳能板是一个半导体光电二极管,当太阳能照射到光电二极管上时,光电二极管把太阳的光能直接转换成电能,从而产生电流为电动机供电。监控采用海康威视太阳能摄像高清远程监控配套装置,该装置可以360
°
旋转,分辨率高且可高速读取数据。
45.进一步的,所述流量测量装置包括固定在船体1顶部的加固垫板22,所述加固垫板22的顶部平行固定有分别采用伸缩套筒26依次相连的第一伸缩柱23和第二伸缩柱24,所述第一伸缩柱23和第二伸缩柱24的顶部安装有横向伸缩板25,所述横向伸缩板25上安装有伸缩节27,所述伸缩节27的另一端安装有凹轨28,所述凹轨28上转动安装有转向轮29,所述转向轮29的底端通过卡扣30安装有监测臂31,所述监测臂31的底端安装有抓斗32,所述抓斗32上安装有光学测量装置33。通过采用上述的流量测量装置能够用于流量的自动测量。
46.实施例2:
47.参见图5,在本实例中,对于流量测量装置,通过光学原理进行测量。在与船面交接处焊接一块5cm厚的不锈钢钢板,在钢板上面设置t型底座,底座的中心向下凹2cm,然后安装立柱,立柱与底座之间采用螺栓连接。立柱与立柱之间安装纵向伸缩套筒,以便于升降杆的伸缩。其中升降杆呈对称分布。在升降杆的上端安装横向伸缩板,伸缩板与伸缩板的连接处由伸缩节进行连接,通过调节横向伸缩板来调节流速测量仪器进入湖底时与船体的距离,以确保不受干扰。在末端的横向伸缩板处设置一条凹轨,凹轨上安装一转向滑轮,可以调节流速测量装置进入水底时的角度。
48.在本实例中,流速测量装置采用高耐腐蚀性的合金钢材质。
49.偏振光对悬浮物质极其敏感,可以对悬浮颗粒的参数如结构、形态、运动等进行识别。悬浮颗粒物通过光源照射能识别悬浮物质的种类。当流量测量装置进入水底后,为了避免装置的扰动造成所测数据不准,因此设置间隔两分钟后进行光源照射,当打开光源,光源发射出的光经过起偏器产生偏振光,经过光学照射仪转化为片光源,照射水中的藻类等悬
浮物质,悬浮物质带有荧光标记,当带有荧光标记的悬浮物质经过第一光学感应装置时,感光相机拍摄图片发送至数据控制中心,第一光学感应装置距第二光学感应装置为1m,带有荧光标记的悬浮物质经过第二光学感应装置时,感光相机拍摄图片发送至数据控制中心,比较第一光学感应装置和第二感应装置的图片成像,通过水深测量数据,数据采集系统接收到的第一光学感应装置拍摄到的图片与第二光学感应装置拍摄到的图片时间差计算可得出该湖泊的实时流量。
50.由于单个颗粒的散射、荧光信号较弱,为了提高信噪比,测量装置应该尽可能的采用高功率光源。通过控制高功率光源的光功率、波长、脉冲或连续照明等,保证偏振信号的信噪比。利用相机成像技术,可实现对水体悬浮物快速、高通量偏振
‑
荧光成像。
51.然而,由于当荧光标记物质通过光感应装置时仅仅是一个发光的团点,因此对感光相机的分辨率、像素等不做要求,选择普通的相机即可,本实例中采用索尼hdr
‑
cx405。
52.在实施过程中,由于只有被光源照亮的截面内的颗粒才能被探测到其散射信号,并最终被感光相机拍摄被数据控制中心接收,因此,需要对探测的范围做一个限定,以便于提高测量质量,减少因颗粒重叠对对图像产生干扰。
53.进一步的,图6为在该湖泊2020年9月10日至10月30日所测得的流量
‑
水位数据。通过图中数据可看出,水深增加,流速也随之增加。
54.实施例3:
55.采用测量水位波动对通江湖泊底栖动物栖息地水动力影响的装置进行测量的方法,它包括以下步骤:
56.step1:将船开至湖泊,太阳能板为电动机,监控装置,数据采集处理模块供电;
57.step2:工作人员闭合电动机以及控制间的开关,控制器控制电动机和线轮协同工作,将重锤放入水底,测量水深;
58.step3:启动流量测量装置,通过抓斗将光学测量装置33放入水底,光学测量装置33中的光源通过起偏器后产生偏振光,经过光学照射仪之后转化为片光源,照射液体截面内的多个悬浮颗粒物,所述片光源经过第一感应照射装置时用感光相机拍摄,第一光源感应装置与第二光源感应装置间隔一定距离,当片光源经过第二感应照射装置时用感光相机再次拍摄,拍摄的结果传入控制间中的数据采集处理模块,数据经过处理后利用5g技术传输至后台电脑,检测流量;
59.step4:中间的控制间20记录水深和流量数据,数据采集装置通过5g信号传输至数据处理终端,输出数据至后台。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。