1.本实用新型属于晶棒拼接设备机械领域,本实用新型涉及一种晶棒拼接设备。
背景技术:
2.伴随现有技术在生产过程中,一般采用人工辅助半自动化进行晶棒拼接,每次晶棒拼接都需要人工辅助完成,包括除污都需要人工辅助完成,如此操作不仅费时费力还费人工,而且存在一定程度的安全隐患;采用人工进行上料,需要人工等待设备完成工序才可进行下一步操作,如此大大的浪费了人工,且重复性操作太多,使操作者容易产生惰性,影响工作效率,存在安全隐患。
技术实现要素:
3.本实用新型的目的是克服上述背景技术中的不足,提供一种晶棒拼接设备,该设备不仅解决了省去人工上料、除污的问题,而且通过感应开关及伺服电机控制,可以做到快速精准定位的操作;另外,在完成拼棒后,还配有擦拭晶棒底部污垢的功能。行成一整套工作流程,如同将流水线浓缩成一台设备。
4.本实用新型解决其技术问题所采用的技术方案是:一种晶棒拼接设备,包括皮带机,皮带机的上方设有晶棒放置台,所述晶棒放置台的一侧设有驱动机构,所述驱动机构包括伺服电机,所述伺服电机通过联轴器与丝杠连接,丝杠的一端连接有丝母,丝母上设有摆缸安装块;摆缸安装块上设有摆缸,摆缸前端连接有插隔片;所述伺服电机的下方设有长度方向夹紧气缸;所述晶棒放置台的另一侧设有宽度方向夹紧气缸和无杆气缸;所述无杆气缸与海绵安装座相连接,所述海绵安装座上设有擦拭海绵;所述海绵安装座相临处设有支杆,所述支杆上设有感应开关;设备相临摆缸一侧的正前方设有支架,支架上与摆缸等高处设有照相机。
5.所述设备还外配有桁架机器人,桁架机器人用于移动晶棒,在拼接前,桁架机器人将待拼接晶棒移动至晶棒放置台;桁架机器人用于将拼接好后的晶棒,移动举起后经擦拭海绵擦拭后,在移动到下一工序。
6.所述皮带机用于运输待拼接的晶棒。所述设备在皮带机处还设有扫码仪,通过扫码仪对待拼接晶棒进行扫码确定晶棒的规格。
7.进一步的,所述伺服电机、长度方向夹紧气缸、宽度方向夹紧气缸、无杆气缸、桁架机器人、照相机、感应开关、扫码仪分别与plc系统相连接。
8.进一步的,所述设备设置在支架上。
9.本实用新型与现有技术相比具有的有益效果是:
10.本实用新型提供的一种晶棒拼接设备,该设备不仅解决了省去人工上料、除污的问题,而且通过感应开关及伺服电机控制,可以做到快速精准定位的操作;另外,在完成拼棒后,还配有擦拭晶棒底部污垢的功能。行成一整套工作流程,如同将流水线浓缩成一台设备。
附图说明
11.下面结合附图和实施例对本实用新型进一步说明:
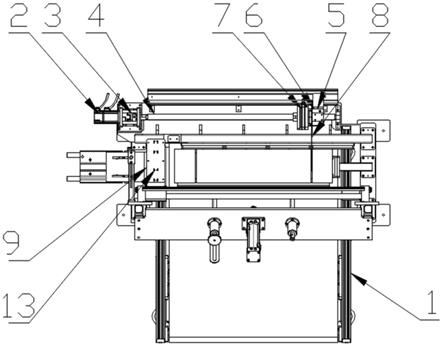
12.图1为本实用新型晶棒拼接设备主视图。
13.图2为本实用新型晶棒拼接设备右视图。
14.图3为本实用新型晶棒拼接设备俯视图。
15.图中1.皮带机;2.伺服电机;3.联轴器;4.丝杠;5.丝母;6.摆缸安装块;7.摆缸;8.插隔片;9.plc系统;10.长度方向夹紧气缸;11.宽度方向夹紧气缸;12.无杆气缸;13.海绵安装座;14.擦拭海绵。
具体实施方式
16.以下结合说明书附图,对本实用新型进一步说明,但本实用新型并不局限于以下实施例。以下实施例中与plc系统相连接的伺服电机、长度方向夹紧气缸、宽度方向夹紧气缸、无杆气缸、桁架机器人、照相机、感应开关、扫码仪均不限定具体型号。可实现其功能即可。
17.实施例1
18.一种晶棒拼接设备,如图1
‑
图3所示,包括皮带机1,皮带机1的上方设有晶棒放置台,所述晶棒放置台的一侧设有驱动机构,所述驱动机构包括伺服电机2,所述伺服电机2通过联轴器3与丝杠4连接,丝杠4的一端连接有丝母5,丝母5上设有摆缸安装块6;摆缸安装块6上设有摆缸7,摆缸7前端连接有插隔片8;所述伺服电机2的下方设有长度方向夹紧气缸10;所述晶棒放置台的另一侧设有宽度方向夹紧气缸11和无杆气缸12;所述无杆气缸12与海绵安装座13相连接,所述海绵安装座13上设有擦拭海绵14;所述海绵安装座13相临处设有支杆,所述支杆上设有感应开关;设备相临摆缸7一侧的正前方设有支架,支架上与摆缸7等高处设有照相机。
19.所述设备还外配有桁架机器人,桁架机器人用于移动晶棒,在拼接前,桁架机器人将待拼接晶棒移动至晶棒放置台;桁架机器人用于将拼接好后的晶棒,移动举起后经擦拭海绵14擦拭后,在移动到下一工序。
20.所述皮带机1用于运输待拼接的晶棒。所述皮带机1处还设有扫码仪,通过扫码仪对待拼接晶棒进行扫码确定晶棒的规格。
21.进一步的,所述伺服电机2、长度方向夹紧气缸10、宽度方向夹紧气缸11、无杆气缸12、桁架机器人、照相机、感应开关、扫码仪分别与plc系统9相连接。
22.进一步的,所述设备设置在支架上。
23.所述晶棒拼接设备将皮带机1输送的晶棒进行扫码仪扫码,以确定晶棒的规格,桁架机器人选取两个可行晶棒长度和相同规格晶棒放在待拼接工位:晶棒放置台;照相机对晶棒放置台上的两个晶棒进行拍照并判断接缝位置,给伺服电机2信号,伺服电机2接受信号后,将通过丝杠4驱动摆缸7达到指定位置,摆缸7将插隔片8插入两个晶棒的缝隙当中;动作完成后端部的长度方向夹紧气缸10动作将拼棒压紧,然后宽度方向夹紧气缸11动作将拼棒压紧;接着桁架机器人将晶棒吸到一定高度,即感应开关感应到晶棒到达位置后,反馈给plc系统9信号,plc系统9发出信号使桁架机器人停止动作,plc系统9给无杆气缸12信号使其动作,无杆气缸12连接的海绵安装座13上装有浸泡酒精的擦拭海绵14对晶棒底部进行擦
拭,全部动作完成后桁架机器人将晶棒取走送到下一道工序。
24.同时通过扫码仪,可以做到将不同规格的晶棒进行选取需要的两端,拼成所需长度规格的晶棒。
25.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
技术特征:
1.一种晶棒拼接设备,其特征是,包括皮带机(1),皮带机(1)的上方设有晶棒放置台,所述晶棒放置台的一侧设有驱动机构,所述驱动机构包括伺服电机(2),所述伺服电机(2)通过联轴器(3)与丝杠(4)连接,丝杠(4)的一端连接有丝母(5),丝母(5)上设有摆缸安装块(6);摆缸安装块(6)上设有摆缸(7),摆缸(7)前端连接有插隔片(8);所述伺服电机(2)的下方设有长度方向夹紧气缸(10);所述晶棒放置台的另一侧设有宽度方向夹紧气缸(11)和无杆气缸(12);所述无杆气缸(12)与海绵安装座(13)相连接,所述海绵安装座(13)上设有擦拭海绵(14);所述海绵安装座(13)相临处设有支杆,所述支杆上设有感应开关;设备相临摆缸(7)一侧的正前方设有支架,支架上与摆缸(7)等高处设有照相机。2.如权利要求1所述的一种晶棒拼接设备,其特征是,所述设备还外配有桁架机器人,桁架机器人用于移动晶棒。3.如权利要求2所述的一种晶棒拼接设备,其特征是,所述皮带机(1)处还设有扫码仪。4.如权利要求3所述的一种晶棒拼接设备,其特征是,述伺服电机(2)、长度方向夹紧气缸(10)、宽度方向夹紧气缸(11)、无杆气缸(12)、桁架机器人、照相机、感应开关、扫码仪分别与plc系统(9)相连接。5.如权利要求4所述的一种晶棒拼接设备,其特征是,所述设备设置在支架上。
技术总结
本实用新型属于晶棒拼接设备机械领域,公开了一种晶棒拼接设备。包括皮带机,皮带机的上方设有晶棒放置台,所述晶棒放置台的一侧设有驱动机构,所述晶棒放置台的另一侧设有宽度方向夹紧气缸和无杆气缸;所述无杆气缸与海绵安装座相连接,所述海绵安装座上设有擦拭海绵;所述海绵安装座相临处设有支杆,所述支杆上设有感应开关;设备相临摆缸一侧的正前方设有支架,支架上与摆缸等高处设有照相机。该设备不仅解决了省去人工上料、除污的问题,而且通过感应开关及伺服电机控制,可以做到快速精准定位的操作。准定位的操作。准定位的操作。
技术研发人员:李全普 鞠修勇 蔡振东 孙明波 姜维旭 李传璞 贺成
受保护的技术使用者:大连久卉科技有限公司
技术研发日:2021.04.13
技术公布日:2021/11/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。