1.本发明涉及一种用于制动装备的操纵装置,所述操纵装置带有进入杆,所述进入杆能够沿轴向推移并且为此具有能与制动踏板耦接的第一端部;带有位移传感器,所述位移传感器具有测量值发送器和接收器,并且所述位移传感器被构造用于获取所述进入杆的移动位置;带有制动力发生器,所述制动力发生器被构造用于根据所获取的移动位置来操纵所述制动装备的主制动缸;并且带有壳体,所述操纵装置的至少一部分布置在所述壳体中。
背景技术:
2.机动车辆的液压制动装备通常具有至少一个配属于车轮的车轮制动装置。此外,所述制动装备具有主制动缸,所述主制动缸与所述车轮制动装置的车轮制动缸在流体技术方面连接,从而通过被支承在所述主制动缸中的液压活塞的沿操纵方向轴向的位移而将制动液从所述主制动缸中推移到所述车轮制动缸中,并且因此,通过所述车轮制动装置来产生减速力矩。为了操纵所述主制动缸、也就是说为了沿操纵方向对所述液压活塞进行位移而设置操纵装置。
3.开头所提及的类型的操纵装置例如由公开文献de 10 2014 220 358 a1已知。所述操纵装置包括进入杆,所述进入杆能够沿轴向推移并且为此具有能与制动踏板耦接的第一端部。
4.此外,所述操纵装置具有位移传感器,所述位移传感器具有测量值发送器和接收器,并且所述位移传感器被构造用于获取所述进入杆的移动位置。此外,设置了制动力发生器,所述制动力发生器被构造用于根据所获取的移动位置来操纵所述制动装备的主制动缸。最后,所述操纵装置具有壳体,其中,在先前已知的操纵装置的情况下,例如制动力发生器的马达被布置在所述壳体中。
技术实现要素:
5.具有权利要求1的特征的按照本发明的操纵装置具有下述优点:能够可靠地获取所述进入杆的移动位置并且节省结构空间地布置所述位移传感器。为此,按照本发明地规定:多件式地构造所述壳体,其中,第一壳体部件配属于所述制动力发生器并且第二壳体部件与所述进入杆耦接,其中,这些壳体部件中的一个壳体部件以能沿轴向推移的方式被支承在所述壳体部件的另外的壳体部件处或者被支承在所述壳体部件的另外的壳体部件中,并且其中,所述第一壳体部件具有接收器并且所述第二壳体部件具有测量值发送器。特别地,所述第一壳体部件相对于所述制动力发生器、尤其相对于所述制动力发生器的电动马达固定地布置。所述位移传感器被构造用于获取所述进入杆的至少一个绝对位移作为所述进入杆的移动位置、也就是说所述进入杆的实际的位置与所述进入杆的初始位置之间的位移差值。在此,初始位置应该理解为所述进入杆的下述位置:从所述位置出发,所述进入杆仅仅能够朝所述主制动缸的方向、也就是说沿操纵方向轴向地位移然而不能够沿相反方向
位移。当所述进入杆不通过所述制动踏板被加载有操纵力时,所述进入杆通常位于所述初始位置中。知道绝对位移能够实现对于被构造为动力制动器的所述制动装备的制动力发生器进行特别有利的操控。为了构造所述动力制动器,所述操纵装置优选地如此构造,以使得所述进入杆和所述液压活塞机械地解除耦接,从而在所述进入杆沿操纵方向推移时,至少在所述操纵装置的正常运行中、也就是说当所述主制动缸能够通过所述制动力发生器无故障地被操纵时,在所述进入杆与所述液压活塞之间至少不存在刚性的机械的耦接。优选地,所述测量值发送器具有至少一个磁体。在这种情况下,所述接收器具有至少一个磁场敏感的元件。
6.按照一种优选的实施方式,所述第一壳体部件和/或所述第二壳体部件构造为抗压的。优选地,这两个壳体部件被构造为抗压的。由此确保了:所述壳体部件在所述进入杆朝所述主制动缸的方向位移时不会变形,从而确保了在所述测量值发送器与所述接收器之间的恒定的径向间距。由此,实现了移动位置的可靠的且精确的获取。
7.优选地,第一壳体部件和/或第二壳体部件具有空心柱形的区段。通过这样的构造,这些壳体部件有利地适合于容纳所述操纵装置的组成部件。
8.优选地,所述操纵装置具有在所述第一壳体部件与所述第二壳体部件之间起作用的扭转止动部。所述扭转止动部防止了这两个壳体部件围绕沿操纵方向伸展的旋转轴线相对于彼此转动。由此确保了所述测量值发送器和所述接收器相对于彼此沿径向对置地布置。
9.按照一种优选的实施方式规定:所述壳体部件中的一个壳体部件具有至少一个凹槽,所述至少一个凹槽沿操纵方向延伸,并且所述凹槽朝向所述壳体部件中的另外的壳体部件敞开,并且所述壳体部件中的另外的壳体部件具有至少一个接片,所述接片为了构成扭转止动部而插入到所述凹槽中。在此,涉及所述扭转止动部的在结构方面特别简单的实施方式。优选地,所述壳体部件中的一个壳体部件具有至少三个凹槽。优选地,所述凹槽沿周向看相对于彼此具有相同的间距。与此相应地,所述壳体部件中的另外的壳体部件具有与所述凹槽的数目相对应的数目的接片,其中,所述接片中的每个接片分别插入到所述凹槽中的一个凹槽中,以用于构成扭转止动部。
10.优选地,所述操纵装置具有密封元件,所述密封元件布置在所述第一壳体部件处并且抵靠在所述第二壳体部件的外壳壁的外侧处。由此防止了颗粒侵入到壳体的内腔中。由此,被支承在所述壳体中的构件得以保护免受由于颗粒所致的磨损。特别地,所述密封元件环形地构造并且沿着所述第一壳体部件的外壳壁的外侧的整个周缘延伸。
11.优选地,所述第二壳体部件的背离所述主制动缸的端壁具有穿口,其中,所述进入杆穿透所述穿口,并且其中,所述穿口的横截面大于所述进入杆的横截面,从而所述进入杆至少在所述穿口的区域中具有径向间隙。背离所述主制动缸的端壁应该理解为所述第二壳体部件的沿操纵方向看在前方的端壁。设置所述径向间隙对于所述进入杆而言是有利的,因为能够与所述进入杆耦接的制动踏板通常以能摆动的方式被布置。因此,与所述制动踏板耦接的进入杆在通过所述操纵装置的使用者来操纵所述制动踏板时不仅沿轴向而且也沿径向加载了力。
12.优选地,所述进入杆具有至少一个导引盘,所述导引盘沿轴向抵靠在所述端壁的后侧处或前侧处。在此,所述端壁的后侧应该理解为所述端壁的背离所述主制动缸的侧部。
所述前侧是所述端壁的面向所述主制动缸的侧部。通过所述导引盘确保了能够通过所述进入杆将轴向力传递到所述第二壳体部件上。因此,与所述进入杆耦接的导引盘确保了所述第二壳体部件与所述进入杆耦接。优选地设置两个导引盘,其中,所述导引盘中的第一导引盘沿轴向抵靠在所述端壁的后侧处,并且所述导引盘中的第二导引盘沿轴向抵靠在所述端壁的前侧处。
13.按照一种优选的实施方式规定:所述进入杆的面向所述主制动缸的第二端部球形地构造,并且为了构造球头关节而插入到与所述进入杆耦接的进入活塞的被构造为球头容纳部的、背离所述主制动缸的第一端部中。在此,通过所述球头关节一方面确保了轴向力能够通过所述进入杆被传递到所述进入活塞上并且另一方面确保了所述进入杆的径向间隙。特别地,所述径向间隙如此构造,以使得所述进入杆能够以大约5
°
为幅度沿径向倾斜。
14.优选地,所述第二壳体部件的端壁被构造为球的球冠,其中,所述球的中心点和所述球头关节的转动点在空间上重叠,并且其中,所述导引盘与所述端壁形状适配地构造。通过所述端壁和所述导引盘的这样的构造确保了所述进入杆的低摩擦的径向的倾斜。
15.按照一种优选的实施方式,所述第二壳体部件的端壁在所述穿口的区域中具有加厚部,从而所述导引盘沿轴向抵靠在所述加厚部处。由此,在所述进入杆沿径向倾斜时进一步减少了摩擦。优选地,所述加厚部沿着所述穿口的整个周缘延伸。
16.优选地,在所述第一壳体部件处构造插接器装置。在此优选地,所述插接器装置相对于所述接收器以位置固定的方式布置。所述插接器装置尤其提供所述接收器与另外的设备、例如控制器的电接触。通过所述固定地布置的第一壳体部件具有接收器并且所述插接器装置布置在所述第一壳体部件处这样的方式,能够放弃尤其用于使所述接收器与所述设备电接触的能变形的电缆。由此节省了结构空间。
17.优选地,为了使所述插接器装置与所述接收器电接触,电缆和/或冲裁网格伸展穿过所述第一壳体部件。因此,所述电缆或者所述冲裁网格布置在所述第一壳体部件的外壳壁之内。优选地,所述第一壳体部件被构造为塑料件。在这种情况下,所述电缆和/或所述冲裁网格优选地被注入到被构造为塑料件的所述第一壳体部件中。
18.优选地,所述操纵装置具有踏板行程模拟器,所述踏板行程模拟器在一方面所述进入杆与另一方面被布置在所述第一壳体部件处的部件之间被预紧。在此,所布置的部件要么紧挨着地也就是说直接地、要么并非紧挨着地也就是说间接地或者说在至少一个另外的元件的中间连接的情况下布置在所述第一壳体部件处。特别地,所布置的部件是所述第一壳体部件本身、另外的壳体部件或者是所述主制动缸。如上述说明的那样,所述进入杆和所述液压活塞能够机械地解除耦接。在这种情况下,通过设置踏板行程模拟器得到下述优点:在所述进入杆朝所述主制动缸的方向位移时提供能被所述操纵装置的使用者感知到的反作用力、也就是说与操纵方向相反地作用的轴向力。因此,所述使用者得到与所述使用者对于所述操纵装置的操纵有关的触觉的反馈。由所述踏板行程模拟器的预紧得到下述优点:所述踏板行程模拟器的部件被紧凑地结合在一起。
19.优选地,所述操纵装置具有弹簧装置,所述弹簧装置为了预紧所述踏板行程模拟器而一方面支撑在被布置在所述第一壳体部件处的部件处并且另一方面支撑在所述踏板行程模拟器处。所述踏板行程模拟器的预紧也就是说至少部分地通过所述弹簧装置来提供。所述弹簧装置在所布置的部件处或者在所述踏板行程模拟器处的支撑也要么紧挨着地
也就是说直接地、要么并非紧挨着地也就是说在至少一个另外的元件的中间连接的情况下来实现。优选地,所述弹簧装置具有用于螺杆的回位弹簧。所布置的部件于是例如是所述第一壳体部件本身、另一壳体部件或者是所述主制动缸。为了支撑在所述踏板行程模拟器处,所述用于所述螺杆的回位弹簧例如支撑在与所述螺杆耦接的压盘处,其中,所述压盘能够至少沿操纵方向随所述螺杆一起位移,并且所述螺杆能够至少与操纵方向相反地随所述压盘一起位移。因此,所述用于螺杆的回位弹簧至少借助于所述压盘、所述螺杆和所述螺杆螺母而支撑在所述踏板行程模拟器处。特别地,在所述螺杆螺母与所述踏板行程模拟器之间布置了传递轴向力的轴承,从而所述弹簧装置于是也借助于所述轴承而支撑在所述踏板行程模拟器处。作为替代方案或者附加方案,所述弹簧装置具有用于所述液压活塞的回位弹簧。所述回位弹簧一方面在所述主制动缸之内支撑在所述主制动缸的面向所述进入杆的侧部处并且另一方面支撑在所述液压活塞的背离所述进入杆的侧部处。因此,用于所述液压活塞的回位弹簧借助于所述液压活塞、所述压杆、所述螺杆、所述螺杆螺母和所述轴承而支撑在所述踏板行程模拟器处。
附图说明
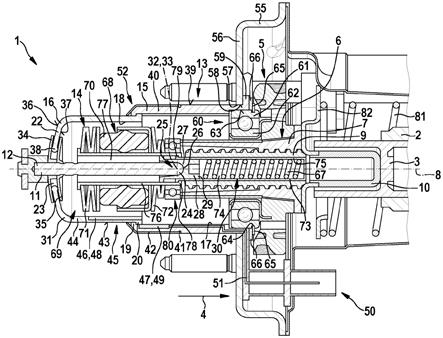
20.在下文中借助于附图更详细地说明本发明,其中,相同的和相应的元件在附图中设有相同的附图标记。其中:图1示出了制动装备的操纵装置的纵向剖视图;并且图2示出了所述操纵装置的壳体部件的详细视图。
具体实施方式
21.图1示出了制动装备的操纵装置1的纵向剖视图。所述操纵装置1被构造用于操纵所述制动装备的主制动缸2,也就是说沿操纵方向4来推移被支承在所述主制动缸2中的液压活塞3。所述主制动缸2在流体技术方面与未被示出的车轮制动装置的车轮制动缸相连接。在此,通过沿操纵方向4推移所述液压活塞3将液压流体从所述主制动缸2推移到所述车轮制动缸中。因此,通过车轮制动装置产生减速力矩。
22.在此,所述操纵装置1具有制动力发生器5。所述制动力发生器5具有螺杆传动机构6。所述螺杆传动机构6包括能通过所述制动力发生器5的电动马达来驱动的螺杆螺母7,所述螺杆螺母以能围绕沿操纵方向4延伸的旋转轴线8转动的方式被支承。此外,所述螺杆传动机构6包括抗转动地且能沿轴向位移地布置的螺杆9,其中所述螺杆9的外传动机构与所述螺杆螺母7的内传动机构咬合,从而所述螺杆9能够通过所述转动螺杆螺母7的转动而沿轴向位移。通过所述螺杆9沿操纵方向4的轴向的位移,所述压杆10——所述压杆的端侧至少在操纵所述主制动缸2时沿轴向抵靠在液压活塞3处——随所述螺杆9一起位移。
23.所述操纵装置1具有进入杆11,所述进入杆能够通过未被示出的制动踏板而沿操纵方向4推移并且能够相对于所述螺杆9沿轴向位移。为此,所述进入杆11的第一端部12与所述制动踏板能够耦接或者耦接。为了沿操纵方向4推移所述进入杆11,所述操纵装置1的使用者操纵所述制动踏板,由此沿操纵方向4作用的轴向力或者说操纵力被传递到所述进入杆11上。
24.此外,所述操纵装置1具有壳体13,在此,所述制动力发生器5和踏板行程模拟器14
布置在所述壳体中。所述壳体13具有第一壳体部件15,所述第一壳体部件相对于所述制动力发生器5固定地布置。此外,所述壳体13具有与所述进入杆11耦接的第二壳体部件16,从而所述第二壳体部件16能够在所述进入杆11沿轴向推移时被一起推移。在此,所述第二壳体部件16以能沿轴向推移的方式支承在所述第一壳体部件15中。为此,所述第一壳体部件15具有比所述第二壳体部件16要大的横截面。作为对此的替代方案,所述第一壳体部件15以能沿轴向推移的方式支承在所述第二壳体部件16中,从而所述第二壳体部件16于是具有更大的横截面。在此,所述第一壳体部件15和所述第二壳体部件16柱形地构造并且具有圆形的横截面。所述壳体部件15和16分别具有轴向凹部17或者18,其中,所述第一壳体部件15的轴向凹部17被构造为轴向穿口。
25.所述第一壳体部件15的背离所述主制动缸2的侧部具有横截面收窄部19。所述第二壳体部件16的面向所述主制动缸2的侧部具有径向突起20,所述径向突起在后方接合所述横截面收窄部19。在此,通过所述径向突起20和所述横截面收窄部19预先给定所述进入杆11的与操纵方向4相反的最大允许的位移。在此,当所述径向突起20沿轴向与所述横截面收窄部19存在触碰接触时,所述进入杆11不能够或不能够进一步与操纵方向4相反地位移。
26.所述第二壳体部件16具有背离所述主制动缸2的端壁22。所述端壁22具有轴向穿口23,所述进入杆11穿透所述轴向穿口。在此,所述轴向穿口23的横截面大于所述进入杆11的横截面,从而所述进入杆11具有径向间隙。优选地,所述轴向穿口23的和进入杆11的横截面如此构造,以使得所述径向间隙大约为5
°
。所述进入杆11的背离所述制动踏板的第二端部24球形地构造,并且为了构造球头关节25而插入到与所述进入杆11耦接的进入活塞28的被构造为球头容纳部26的、背离所述主制动缸2的第一端部27中。
27.所述第二壳体部件16的端壁22被构造为球的球冠31,其中,所述球的中心点32和所述球头关节28的转动点33在空间上重叠。为了将所述进入杆11与所述第二壳体部件16耦接起来,所述进入杆11具有第一导引盘34和第二导引盘35。在此,所述第一导引盘34沿轴向抵靠在所述端壁22的后侧36处、也就是说背离所述主制动缸2的侧部处。所述第二导引盘35沿轴向抵靠在所述端壁22的前侧37处、也就是说面向所述主制动缸2的侧部处。两个导引盘34和35与所述端壁22形状适配,从而确保所述进入杆11的低摩擦的径向的倾斜。为了在径向的倾斜时进一步减少摩擦,所述端壁22在所述轴向穿口23的区域中具有加厚部38,其中,所述导引盘34和35仅仅沿轴向抵靠在所述加厚部38处。
28.所述进入活塞28的面向所述主制动缸2的第二端部29沿轴向抵靠在所述踏板行程模拟器14的背离所述主制动缸2的端部处,从而所述踏板行程模拟器14能够通过所述进入活塞28或者通过与所述进入活塞28耦接的进入杆11来操纵。因为所述进入杆11和所述进入活塞28彼此耦接,所以所述踏板行程模拟器14的背离所述主制动缸2的端部间接地抵靠在所述进入杆11的第二端部24处。在另一端,所述踏板行程模拟器14借助于传递轴向力的轴承80沿轴向抵靠在所述螺杆螺母7的背离所述主制动缸2的侧部处。
29.在此,所述踏板行程模拟器具有第一弹簧装置30、第二弹簧装置68和第三弹簧装置69。所述第一弹簧装置具有螺旋弹簧67。所述第二弹簧装置68具有弹性体弹簧70。所述第三弹簧装置69具有两个蝶形弹簧71、72。所述踏板行程模拟器14借助于所述螺旋弹簧67抵靠在所述进入活塞28处并且因此抵靠在所述进入杆11处。所述踏板行程模拟器14的弹簧装置30、68和69串联地连接。
30.此外,所述操纵装置1具有套筒形的第一元件73。所述第一元件73具有轴向凹部74,所述第一弹簧装置30或者说所述螺旋弹簧67布置在所述轴向凹部中。所述第一弹簧装置30的或者说所述螺旋弹簧67的面向所述主制动缸2的端部在所述轴向凹部74之内沿轴向抵靠在所述第一元件73的背离所述主制动缸2的侧部处。在此,所述第一元件73能够相对于所述螺杆9位移并且支承在所述螺杆9的轴向凹部75中。
31.此外,所述操纵装置1具有套筒形的第二元件76,所述第二元件具有轴向穿口77,所述进入杆11同轴地延伸穿过所述轴向穿口。所述第二元件76和所述第一元件73至少部分区段地彼此同中心地布置,其中,所述第二元件76比所述第一元件73具有更大的横截面。因此,所述第一元件73沿径向在所述第二元件76中被引导。所述第二元件76具有横截面收窄部78,所述横截面收窄部在后方接合所述第一元件73的径向突起79。在此,横截面收窄部78位于所述第二元件76的沿操纵方向看在后方的端部的区域中。所述径向突起79位于所述第一元件73的沿操纵方向4看在前方的端部处。此外,所述第二元件76具有沿操纵方向4在所述横截面收窄部78的前方的径向突起79,其中,所述第三弹簧装置69支撑在所述径向突起79的面向所述主制动缸2的侧部处。因此,所述第一弹簧装置30和所述第三弹簧装置69借助于所述第一元件73和所述第二元件76串联地连接。按照图1,所述径向突起79位于所述第二元件76的沿操纵方向4看在前方的端部处。
32.所述踏板行程模拟器14如此构造,以使得所述踏板行程模拟器在一方面所述进入杆11与另一方面至少间接地被布置在所述第一壳体部件15处的部件之间保持预紧。也就是说,所述踏板行程模拟器14至少在所述第一壳体部件15的横截面收窄部19沿轴向抵靠在所述第二壳体部件16的径向突起20处的情况下,所述踏板行程模拟器14一方面提供与操纵方向4相反地作用到所述进入杆11上的轴向力并且另一方面提供沿操纵方向4作用到至少间接地被布置在所述第一壳体部件15处的部件上的轴向力。
33.在此,所述操纵装置1为了预紧所述踏板行程模拟器14而具有第四弹簧装置81。所述第四弹簧装置81一方面支撑在压盘82处,所述压盘沿轴向抵靠在所述螺杆9处,其中,所述压盘82能够至少沿操纵方向4随所述螺杆9一起位移,并且所述螺杆9能够至少与操纵方向4相反地随所述压盘82一起位移。因此,所述第四弹簧装置81被构造为用于所述螺杆9的回位弹簧81。所述第四弹簧装置81另一方面支撑在未被示出的壳体部件处,所述壳体部件至少间接地布置在所述第一壳体15处。最终,借助于所述进入活塞28、所述踏板行程模拟器14、所述轴承80、所述螺杆螺母7、所述螺杆9和所述第四弹簧装置81实现将轴向力从所述进入杆11传递到所述未被示出的壳体部件上。
34.所述第一壳体部件15在其外壳壁40的外侧39处具有沿周向伸展的环形槽41。环形的密封元件42插入到所述环形槽41中。所述密封元件42朝所述第二壳体部件16的方向延伸并且沿径向抵靠在所述第二壳体部件的外壳壁44的外侧43处。通过所述密封元件42防止了颗粒侵入到所述轴向凹部17和18中、也就是说侵入到所述壳体13的内腔中。
35.此外,所述操纵装置1具有位移传感器45。所述位移传感器被构造用于获取所述进入杆11的绝对位移。为此,所述位移传感器45具有布置在所述第二壳体部件16处的测量值发送器46。此外,所述位移传感器45具有接收器47,所述接收器与所述测量值发送器46沿径向对置地布置在所述第一壳体部件15处。在此,所述测量值发送器46具有至少一个磁体48。所述接收器47具有至少一个磁场敏感的元件49。所述制动力发生器5被构造用于:根据进入
杆11的所获取的绝对位移使得所述螺杆9进行位移并且因此操纵所述主制动缸2。
36.为了尤其电接触所述接收器47,所述第一壳体部件15具有插接器装置50。所述插接器装置50和所述接收器47通过延伸穿过所述第一壳体部件15的冲裁网格(stanzgitter)51彼此连接。在此,所述第一壳体部件15被构造为塑料件。在此,所述冲裁网格51被注入到被构造为塑料件的第一壳体部件15中。优选地,所述第二壳体部件16也被构造为塑料件。
37.此外,所述操纵装置1具有传动机构壳体55,所述传动机构壳体相对于所述制动力发生器5固定地布置。所述传动机构壳体55的端壁56具有轴向穿口57,所述第一壳体部件15穿过所述轴向穿口。如此选择所述轴向穿口57的直径,以使得所述第一壳体部件15的外壳壁40的外侧39沿径向抵靠在所述传动机构壳体55的或者所述端壁56的限定了所述轴向穿口57的内侧58处。所述第一壳体部件15具有在后方接合所述端壁56的径向突起59,从而所述径向突起59的背离所述主制动缸2的侧部沿轴向抵靠在所述端壁56的面向所述主制动缸2的侧部处。通过轴向的抵靠限定了所述第一壳体部件15的与操纵方向4相反的最大允许的位移。所述插接器装置50在所述第一壳体部件15处构造在所述径向突起59的区域中。因此,所述插接器装置50位于所述传动机构壳体55的端壁56的面向所述主制动缸2的侧部上。由此,所述插接器装置50能够与另外的设备、例如与用于操控所述制动力放大器5的电动马达的控制器在结构方面简单地且节省结构空间地电连接或者在通信技术方面连接。
38.此外,所述操纵装置1具有滚动轴承60。所述滚动轴承60具有两个同中心的轴承环61和62,其中,所述轴承环61比所述轴承环62具有更大的直径。相应地,所述轴承环61是外部的轴承环61并且所述轴承环62是内部的轴承环62。所述外部的轴承环61沿径向抵靠在所述第一壳体部件15的外壳壁40的内侧63处。所述外部的轴承环61具有沿周向伸展的环形槽64,止动环、尤其是卡合环65插入到所述环形槽中。在此,所述卡合环65具有下述直径,所述直径大于所述外部的轴承环61的直径并且小于所述轴向穿口57的直径。
39.此外,所述操纵装置1具有支撑环66、尤其板式支撑环66,其直径大于所述轴向穿口57的直径。所述支撑环66布置在所述第一壳体部件15与所述卡合环65之间,其中,所述支撑环66的背离所述主制动缸2的侧部抵靠在所述径向突起59的或者说所述第一壳体部件15的面向所述主制动缸2的侧部处,并且其中,所述支撑环66的面向所述主制动缸2的侧部抵靠在所述卡合环65的背离所述主制动缸2的侧部处。通过使得所述支撑环66的直径大于所述轴向穿口57的直径来确保:在给所述第一壳体部件15施加轴向力时,所述轴向力作为纯压力通过所述径向突起59流动,从而所述径向突起59不经受剪切力或者说不经受使所述径向突起59弯曲的力。
40.按照未被示出的实施例,优选地放弃所述支撑环66。为了确保所述轴向力作为纯压力通过所述径向突起59流动,于是所述卡合环65和所述环形槽64如此布置,以使得所述卡合环65的背离所述主制动缸2的侧部沿轴向直接抵靠在所述第一壳体部件15的或者说所述径向突起59的面向所述主制动缸2的侧部处。此外,所述卡合环65于是如此确定尺寸,以使得所述卡合环65的直径大于所述轴向穿口57的直径。
41.按照另一未被示出的实施例,优选地不仅放弃所述支撑环66而且也放弃所述卡合环65。为了确保所述轴向力作为纯压力通过所述径向突起59流动,于是所述外部的轴承环61如此构造,以使得所述外部的轴承环具有径向突起,所述径向突起的直径大于所述轴向穿口57的直径,并且所述径向突起的背离所述主制动缸2的侧部沿轴向直接抵靠在所述第
一壳体部件15或者说所述径向突起59的面向所述主制动缸2的侧部处。
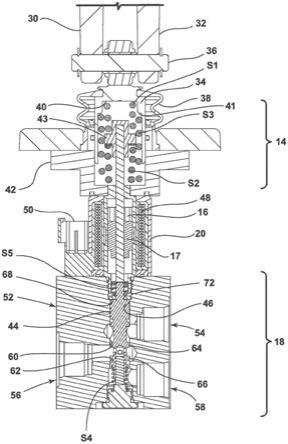
42.图2示出了第二壳体部件16的立体图以及第一壳体部件15的纵向剖视图。所述操纵装置1具有在所述第一壳体部件15与所述第二壳体部件16之间起作用的扭转止动部52。一方面,所述扭转止动部52包括三个凹槽53,其构造在所述第二壳体部件16的径向突起20中并且沿操纵方向4延伸。此外,所述扭转止动部52包括三个构造在所述第一壳体部件15处的接片54。在所述操纵装置1的装配好的状态中,为了构造所述扭转止动部52所述接片54中的每个接片分别插入到所述凹槽53中的一个凹槽中。通过所述扭转止动部52防止了所述第一壳体部件15和所述第二壳体部件16围绕旋转轴线8相对于彼此转动。因此,所述扭转止动部52确保了所述测量值发送器46和所述接收器47沿径向对置地布置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。