1.本发明涉及用于测量人类测试受试者的身体部位的振动触觉感知的技术。
背景技术:
2.诸如手和脚的周围身体部位的充分振动触觉感知对于日常生活至关重要。伴有手部对振动敏感性受损的个人可能难以操纵小的物体、易于掉落物体,甚或无法执行日常任务,诸如穿衣/脱衣、护理卫生或准备食物。足部的敏感性降低可能影响个人的平衡,并且可能削弱个人感知足部水疱形成的能力,从而潜在地使水疱发展成足部溃疡。
3.降低的振动触觉感知可能是因高幅度和长持续时间的机械振动对神经或血管的损伤而造成的。这种机械振动例如可以由手持式振动器械或工具产生。还公知的是,削弱的振动触觉感知可能由糖尿病患者的神经功能的逐渐恶化以及化疗患者的经化学引发的神经病而引起。
4.无论起源如何,外周神经病的早期检测对于防止永久性损伤或至少防止状况恶化是必要的。人类受试者的身体部位的振动触觉感知的灵敏和准确测量被认为是早期和可靠检测受损神经功能的有价值的工具。
5.在临床实践中,伴随触觉感知的问题通常是通过问卷中的自我报告来诊断的。这是一种快速且便宜的诊断技术。然而,即使向受试者发出细致的指令,该技术也是完全主观的,并且易于出现误解和心理偏差,诸如受试者当前的情绪或不愿意承认任何问题。
6.其它已知的诊断技术利用单丝或音叉,将该单丝或音叉按压至受试者的皮肤以引起限定的力/振动。要求受试者报告何时感知到力/振动,这表明触觉敏感性的水平。该技术依赖于操作者的技能并且不适于客观且准确的确定。
7.还已知使用一种专门的医学装置,该医学装置被称为振动计、生物振动计(biothesiometer)、触觉振动计(pallesthesiometer)或神经振动计(neurothesiometer)。将该医学装置配置成,以一个或更多个振动频率来测量振动/振动触觉感知阈值(vpt)。该装置包括突出的圆柱体或探头,当该圆柱体或探头与受试者的身体部位接合时,对该圆柱体或探头进行控制以针对一个或更多个不同的频率以变化的振幅振动。在该测试过程期间,可以指令受试者,指示振动随着振幅的逐渐减小何时不再可辨别,以及指示振动随着振幅的逐渐增大何时再次感测到。在感知丧失以及再次获得时的振幅形成了vpt,可以对该vpt进行分析以量化受试者的振动触觉感知。
8.在wo2006/046901中公开了这种振动计的示例。对于定量分析,重要的是受试者在测试过程期间以一致的方式将身体部位施加到探头上。为此,振动计可以包括压力/力传感器,该压力/力传感器被可操作地连接至探头以对施加的力进行测量。振动计向受试者或操作者提供关于所测得的施加的力的反馈,从而使得受试者能够进行调节以在探头上获得足够一致的施加的力。
9.已知皮肤温度对振动计所测得的vpt有影响。例如,已发现当手指温度低于27℃
时,手指对振动的敏感性显著下降,例如,参见harazin等人发表于int j occup med environ health,2013,26(6),pp 930
‑
939的“effect of individual finger skin temperature on vibrotactile perception threshold”。因此,获知皮肤温度以便避免vpt的不正确或误导性测量是重要的。事实上,由iso 13091
‑
1和13091
‑
2给出的用于振动触觉感知测量的iso标准规定,在测试过程期间,皮肤温度应处于27℃至35℃的范围内,并且环境温度应处于20℃至30℃的范围内。该标准还规定,如果在测试过程期间或之后检测到或怀疑偏离这些温度范围,则应重复该测试过程。
10.wo2006/046901提出在探头上安装温度传感器,以在测试过程期间或者至少在测试过程开始时对皮肤温度进行测量。然而,技术上要求将温度传感器与探头集成而不影响该探头的振动。此外,振动可能影响传感器的耐久性。
11.实际上,例如在本技术人的商业可获的第一代vibrosense 中,振动计壳体可以包括处于与探头很好地分离的位置的测温用接触传感器。可以将该接触传感器用于测量皮肤温度和环境(房间)温度两者。在测试过程之前,受试者将相关身体部位置于接触传感器上以检查皮肤温度。该附加步骤花费时间并且使振动计使用起来更复杂。为了避免忘记初始皮肤温度测量,振动计需要执行专用的确认步骤。此外,身体部位与接触传感器之间的不足的接触压力和接触时间可能损及温度测量的准确度。而且,环境温度的测量可以因振动计的温度而发生偏差,该振动计可能被壳体内部的电子器件加热。
技术实现要素:
12.本发明的目的是至少部分地克服现有技术的一个或更多个局限性。
13.另一目的是在用于测量振动触觉感知的设备中促进对相关身体部位的皮肤温度的自动测量。
14.另一目的是使得能够自动测量环境温度。
15.又一目的是确保所测得的温度的准确度。
16.这些目的中的一个或更多个目的以及从下面的描述中可以显现的进一步的目的是至少部分地通过根据独立权利要求的设备、方法以及计算机可读介质来实现的,所述设备、方法以及计算机可读介质的实施方式通过所附权利要求进行了限定。
17.本发明的第一方面是提供一种被配置成执行用于对受试者的振动触觉感知进行测量的测试过程的设备。该设备包括:振动探头,该振动探头具有端部,该端部被设置为接合受试者的身体部位;免接触温度传感器,该免接触温度传感器被配置成当身体部位与端部接合时面对该身体部位,该免接触温度传感器被配置成提供第一输出信号;被联接至振动探头的力传感器,所述力传感器被配置成提供指示施加到端部上的力的第二输出信号;以及控制单元,该控制单元被配置成,在测试过程之前,计算第一输出信号和/或第二输出信号指示身体部位的存在或不存在的一个或更多个特征参数,并且在基于所述一个或更多个特征参数确定存在身体部位时,将身体部位的当前温度定成由第一输出信号给出的当前温度值。
18.第一方面的设备包括用于感测温度的免接触传感器。这种免接触传感器能够远程感测视场内的温度。如果视场不受遮挡,则该传感器测量周围的温度,即,环境温度。如果在视场中放置有物体,则该传感器测量该物体的表面温度。由于身体部位温度和环境温度未
知并且可能重叠(如在背景技术部分中说明的),因此,在用于测量振动触觉感知的设备中实现免接触温度传感器需要区分环境温度的测量与身体部位温度(皮肤温度)的测量。虽然这可以通过对这两类测量的时间分隔来实现(例如,通过指令受试者以特定时间点将身体部位置于传感器上方),但是这种附加步骤花费时间、使该设备使用起来更复杂,并易于产生人为错误。第一方面基于以下见识:当身体部位接合振动探头的端部时,希望将免接触传感器设置成面对身体部位,因为这可使在测试过程之前,当身体部位在探头上就位时能够自动测量皮肤温度。将免接触传感器优选地设置成,测量身体部位和端部之间的接触区域附近的温度,例如在距接触区域0至50mm的距离内。第一方面还基于以下见识:可以将上面提及的时间区分替换成基于温度传感器的输出信号与被联接至振动探头的力传感器的输出信号中的至少一个输出信号的信号分析的区分,并且这样的区分使得能够自动且可靠地测量皮肤温度。因此,可以当受试者在通过将身体部位放置成与振动探头的端部接触来准备进行振动触觉感知测量时,对皮肤温度进行测量,而无需对标准过程进行任何改变,甚至无需通知或指令受试者关于温度测量。例如,该设备能够验证皮肤温度落入所需范围内,同时该设备验证施加的力是足够的。
19.可以认识到,第一方面在准备测试过程中通过使得在身体部位与振动探头接合的同时能够实现温度测量,来促进自动测量皮肤温度。由此,第一方面减少了测试过程的准备时间,并且消除了忘记测量以及验证皮肤温度的风险。第一方面还消除了指令受试者测量皮肤温度的需要。作为有益的副作用,第一方面还通过使用免接触传感器使得在测试过程期间能够自动测量皮肤温度。还可想到的是,在测试过程期间基于免接触传感器的输出信号来验证在探头上身体部位的存在。
20.此外,第一方面确保所测得的皮肤温度的准确度。由于在免接触传感器与身体部位之间没有物理接触,因此,准确度不受接触压力或接触时间的变化所影响。此外,由于皮肤温度是在准备测试过程中当身体部位与振动探头接合的同时进行测量的,因此,可以最小化测量时间的变化。
21.更进一步地,也可以操作免接触传感器来测量环境温度。与接触传感器相比,由于免接触传感器通常对其自身温度以及安装位点处的温度不太敏感,因此,可以提高环境温度的准确度。可以将免接触传感器配置成,在确定预定的视场内的温度时,测量并补偿安装位置处的温度。
22.下面,定义了第一方面的各种实施方式。这些实施方式提供了前文所描述的技术效果和优点中的至少一些技术效果和优点,并且本领域技术人员例如考虑到以下详细描述而容易理解的附加技术效果和优点。
23.在一些实施方式中,还将控制单元被配置成,当基于所述一个或更多个特征参数确定在端部上不存在身体部位时,将当前环境温度设定成由第一输出信号给出的当前温度值。
24.在一些实施方式中,所述一个或更多个特征参数包括至少两个特征参数,其中,将控制单元配置成,仅当全部特征参数均指示存在身体部位时,才将身体部位的当前温度设定成由第一输出信号给出的当前温度值。
25.在一些实施方式中,还将控制单元配置成,当所述两个或更多个特征参数中的至少一个特征参数指示在端部上不存在身体部位时,将当前环境温度设定成由第一输出信号
给出的当前温度值。
26.在一些实施方式中,免接触温度传感器是电磁辐射传感器。
27.在一些实施方式中,将控制单元配置成,根据第一输出信号和第二输出信号两者来计算所述一个或更多个特征参数。
28.在一些实施方式中,将控制单元配置成,通过关于相应的值范围对所述一个或更多个特征参数进行评估,来确定在端部上身体部位的存在。
29.在一些实施方式中,将控制单元配置成,计算所述一个或更多个特征参数中的表示第一输出信号或第二输出信号的时间梯度的至少一个特征参数,并且关于梯度值范围对时间梯度进行评估,以确定在端部上身体部位的存在。
30.在一些实施方式中,将控制单元配置成,计算所述一个或更多个特征参数中的表示第一输出信号或第二输出信号的可变性的至少一个特征参数,并且关于可变性基准对该可变性进行评估,以确定在端部上身体部位的存在。
31.在一些实施方式中,将控制单元配置成,在在端部处不存在身体部位的基准阶段期间,计算基线时间可变性,并且基于该基线时间可变性来设定可变性基准。
32.在一些实施方式中,该设备还包括热源,该热源被配置成,如果身体部位与端部接合,则在该身体部位处产生热,以供免接触温度传感器进行检测,还将控制单元配置成,在预定时段内使热源启用至少一次,并且计算在预定时段期间第一输出信号的所述特征参数中的至少一个特征参数。
33.在一些实施方式中,还将控制单元配置成,当基于所述一个或更多个特征参数确定不存在身体部位时,将当前环境温度设定成由在热源被停用时第一输出信号给出的当前温度值。
34.在一些实施方式中,还将控制单元配置成,计算所述一个或更多个特征参数中的表示第一输出信号或第二输出信号的幅度的至少一个特征参数,并且关于幅度范围对该幅度进行评估,以确定在端部上身体部位的存在。
35.在一些实施方式中,该包括另一温度传感器,并且将控制单元配置成,从该另一温度传感器获得温度值,并且基于该温度值设定幅度范围。
36.在一些实施方式中,该设备包括壳体,该壳体至少容纳振动探头和免接触温度传感器,并且该另一温度传感器被定位成感测壳体内部的温度。
37.在一些实施方式中,所述一个或更多个特征参数表示第一输出信号和/或第二输出信号的幅度、可变性以及时间梯度中的至少一者。
38.在一些实施方式中,该设备还包括:支承表面部分,该支承表面部分是与振动探头间隔开的;以及接触传感器,该接触传感器被设置在支承表面部分处,以对身体部位和支承表面部分之间的接触进行检测,其中,将控制单元配置成:从接触传感器获得第三输出信号,并且仅当基于所述一个或更多个特征参数确定身体部位存在,并且第三输出信号指示身体部位与支承表面部分之间的所述接触时,才将身体部位的当前温度设定成由第一输出信号给出的当前温度值。
39.在一些实施方式中,该设备还包括壳体,该壳体限定第一开孔以及与第一开孔在空间上分隔开的第二开孔,并且将振动探头与第一开孔对准地设置在壳体中,并且将免接触温度传感器与第二开孔对准地设置在壳体中。
40.第二方面是提供一种准备用于对受试者的振动触觉感知进行测量的设备的方法,该设备包括振动探头,该振动探头具有端部,该端部被设置为接合受试者的身体部位。所述方法包括以下步骤:当身体部位与振动探头的端部接合时,从被设置成面对该身体部位的免接触温度传感器获得第一输出信号,并且可选地从联接至振动探头的力传感器获得第二输出信号,所述第二输出信号指示施加到端部上的力;计算第一输出信号和/或第二输出信号的一个或更多个特征参数;针对身体部位的存在,对所述一个或更多个特征参数进行评估;以及在所述评估指示存在身体部位时,将该身体部位的当前温度设定成由第一输出信号给出的当前温度值。
41.第一方面的所述实施方式中的任一实施方式均可以适于和实现为第二方面的实施方式。
42.本发明的第三方面是提供一种包括计算机指令的计算机可读介质,该计算机指令在由处理器执行时,使该处理器执行第二方面或其实施方式中的任一实施方式的方法。
43.第四方面是提供一种被配置成执行用于对受试者的振动触觉感知进行测量的测试过程的设备。该设备包括:振动探头,该振动探头具有端部,该端部被设置为接合受试者的身体部位;免接触温度传感器,该免接触温度传感器被配置成提供第一输出信号,并且该免接触温度传感器设置有其视场,该视场在身体部位与端部接合时面对该身体部位;存在传感器,该存在传感器被配置成,提供指示在视场中身体部位的存在的第二输出信号;以及控制单元,该控制单元被配置成,在测试过程之前,针对在视场中身体部位的存在,对第二输出信号进行评估,并且当确定存在身体部位时,将身体部位的当前温度定成由第一输出信号给出的当前温度值。在一个实施方式中,存在传感器是被配置成对身体部位的阴影进行检测的辐射检测器。在一个实施方式中,辐射传感器的视场至少部分地重叠免接触温度传感器的视场。在一个实施方式中,将存在传感器配置成,至少部分地检测可见波长范围内的辐射。
44.第五方面是提供一种准备用于对受试者的振动触觉感知进行测量的设备的方法,该设备包括振动探头,该振动探头具有端部,该端部被设置为接合受试者的身体部位。所述方法包括以下步骤:从免接触温度传感器获得第一输出信号,该免接触温度传感器设置有其视场,该视场在身体部位与端部接合时面对该身体部位;从存在传感器获得第二输出信号,该第二输出信号是响应于视场中身体部位的存在的;针对在视场中身体部位的存在,对第二输出信号进行评估;以及在所述评估确定存在身体部位时,将该身体部位的当前温度设定成由第一输出信号给出的当前温度值。
45.根据下面的详细描述、根据所附权利要求以及根据附图,可以呈现本发明的其它的目的、特征、实施方式、方面以及优点。
附图说明
46.现在,参照附图,对本发明的实施方式进行更详细描述。
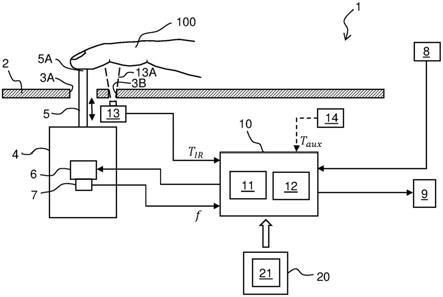
47.图1是根据实施方式的用于测量身体部位的振动触觉感知的设备的、部分采用截面的示意性侧视图。
48.图2是在身体部位与图1的设备接合期间来自该设备中的传感器的举例说明的输出信号的曲线图。
49.图3是根据实施方式的用于温度确定的处理的流程图。
50.图4a至图4f是根据另一些实施方式的用于温度确定的处理的流程图。
51.图5是根据另一实施方式的用于测量身体部位的振动触觉感知的设备的示意性侧视图。
52.图6是根据另一实施方式的用于温度确定的处理的流程图。
具体实施方式
53.下文中,可以参照附图,对本发明的实施方式进行更全面描述,其中,示出了本发明的一些而非全部实施方式。实际上,本发明可以按许多不同的形式具体实施,而不应视为对本文所阐述的实施方式进行限制。相反地,提供这些实施方式,以使本公开可以满足可应用法定需求。贯穿全文,相同的数字指代相同的要素。
54.而且,应理解,在可能的情况下,本文所描述和/或设想的本发明的实施方式中的任何实施方式的优点、特征、功能、装置和/或可操作方面中的任一者都可以被包括在本文所描述和/或设想的本发明的其它实施方式中的任何其它实施方式中,反之亦然。另外,在可能的情况下,除非另外明确地规定,否则本文按单数形式表达的任何术语意指也包括多数形式,反之亦然。如本文所用,“至少一个”应当意指“一个或更多个”并且这些短语可互换。因此,即使本文还使用了短语“一个或更多个”或者“至少一个”,术语“一(a)”和/或“一(an)”也应当意指“至少一个”或者“一个或更多个”。如本文所用,除上下文因明确的语言或必要的含义而另有要求之外,单词“包括”或诸如“包括(comprises)”或“包含(comprising)”之类的变体以包含的意义加以使用,就是说,指定存在规定特征,但不排除在本发明的各种实施方式中存在或添加另一些特征。类似地,表达“根据(as a function of)”和“基于”与指定的参数集等组合是包括性的,并且不排除存在或添加另一些参数。
55.图1是用于测量振动触觉感知的设备1的示意性截面图,该设备在下面指示为“振动计”。将振动计1配置成,确定待测试的人类受试者(“测试受试者”)的身体部位100在一个或更多个频率下的振动感知阈值vpt。用于确定和评估vpt的技术在本领域中是公知的,本文不再进行详细描述。可以测量任何身体部位100(包括手或脚)的vpt。在例示示例中,身体部位100是手,并且对手指的振动触觉感知进行测量。
56.振动计1包括仅部分示出的壳体2,该壳体封闭机电测量系统并限定第一开孔3a和第二开孔3b。壳体2还可以用作身体部位100的机械支承,以提高测试受试者的舒适度并且确保以一致且可重复的方式测量vpt。该测量系统包括具有振动探头5的测量装置4,该振动探头5被设置成穿过第一开孔3a突出以暴露探头远端5a(“端部”)。测量装置4包括振动器6和力传感器7,该振动器是在供应有电流或电压时进行振动的电动装置。将振动探头5联接至振动器6,该振动器由此可操作以将纵向振动传给探头5,如双向箭头所示。将力传感器7直接或间接联接至探头5,以感测探头端部5a上的纵向施加的力。力传感器7可以是任何类型的,并且力可以通过直接力测量(例如通过一个或更多个应变仪、加速度计等)给出,或者通过探头或振动器6的位移的间接测量来给出。力也可以通过对供应给振动器6的电流的分析来间接给出。振动计1还包括输入装置8,该输入装置可使测试受试者能够发信号通知该测试受试者何时感测到探头5的振动。输入装置8可以包括按钮、键盘、小键盘、麦克风、姿势识别系统等的任何组合。反馈装置9使得振动计1能够向测试受试者或系统1的操作者输出
指示或指令。反馈装置9可以包括指示灯、显示器、触摸屏、扬声器等的任何组合。控制单元10操作振动计1并且通过有线或无线进行连接,以向振动器6输出控制信号和向反馈装置9输出反馈信号,并接收来自力传感器7的力信号f和来自输入装置8的输入信号。将控制单元10配置成执行测试过程以获得vpt。在测试过程期间,控制单元10操作振动器6,以在不同的强度(振幅)下以一个或更多个频率将振动传给探头5。已经将手指(例如,如图所示的指尖)与探头端部5a接合的测试受试者然后经由输入装置8指示何时感测到探头5的振动。在测试过程期间,控制单元10监测来自传感器7的力信号f,以确保指尖施加在探头端部5a上的力是足够的。
57.在例示示例中,控制单元10包括处理器11和计算机存储器12。包括程序指令的控制程序被存储在存储器12中并且可由处理系统1101来执行,以控制振动计1的操作(包括本文所公开的所有方法和处理)。如所示,可以将控制程序21通过计算机可读介质20提供给计控制单元10,该计算机可读介质可以是有形的(非暂时性)产品(例如,磁介质、光盘、只读存储器、闪存等),或者传播信号。
58.在图1中,振动计1还包括免接触温度传感器13,该免接触温度传感器被设置成与第二开孔3b对准,以测量由图1的虚线所示的视场13a内的温度。在另选例(未示出)中,将传感器13设置在第一开孔3a中并且省略了第二开孔3b。提供分离的开孔3a、3b可以有助于传感器13的视场13a的制造和适当放置。此外,两个分离的开孔可以设计有比容纳探头5和传感器13两者的单个开孔更小的总面积,从而减小污染物、灰尘、固态物、湿气等入侵的风险。将传感器13设置成使得视场13a位于探头端部5a附近。在这种背景下,“位于附近”意味着视场13a可以与探头端部5a间隔开、接界,或者包括探头端部5a。免接触传感器13(“远程传感器”)可以是能够远程测量温度的任何类型,包括不同类型的电磁辐射传感器,例如,以红外或近红外光谱操作的电磁辐射传感器。这种远程传感器包括辐射热计、热电堆传感器、热电检测器、光纤高温计、量子检测器以及热致变色传感器。将控制单元10通过有线或无线连接成从传感器13接收信号t
ir
。在下面进一步描述的一些实施方式中,还可以将控制单元10连接成从第二温度传感器14接收辅助温度信号t
aux
,该第二温度传感器14被设置成感测振动计1内部(即,壳体2内)的环境温度。第二传感器14可以是任何可想到的类型并且可以与传感器13集成。在一个实施方式中,将控制单元10或传感器13配置成使用信号t
aux
来补偿传感器13处的局部温度的信号t
ir
,如本领域所已知的。
59.如从背景技术部分所理解的,希望在开始测试过程之前,验证身体部位100的皮肤温度,并且优选地还验证振动计1的位置处的周围(环境)温度。还优选的是,这种验证由振动计1自动进行,而无需对测试受试者施加约束或特殊动作。传感器13的温度信号t
ir
将指示视场13a内的平均温度。可以认识到,该平均温度在身体部位100没有位于视场13a内时将对应于环境温度,而在身体部位100位于视场13a内时对应于皮肤温度。然而,由于皮肤温度和环境温度可以达到相似的值,因此,在温度信号t
ir
中区分环境温度和皮肤温度是有挑战性的。本发明的实施方式寻求克服这个问题,并且优选地在振动计1的成本和复杂性方面具有最小增加。
60.图2描绘了根据时间的测量信号,并且可以看出示意性地表示了来自传感器7的力信号f或者来自传感器13的温度信号t
ir
。在时间点t1,当身体部位100开始接合探头端部5a时力信号f有显著变化,并且当身体部位100开始进入视场13a时温度信号t
ir
有显著变化。如
所看到的,身体部位100的存在导致信号f、t
ir
中的阶跃变化δf、δt。然而,应注意,根据环境温度与皮肤温度之间的当前关系,温度的阶跃变化可以是正的(如图所示)、负的或者无变化。此外,在例示示例中,存在身体部位100时的时间可变性var(t
p
)、var(f
p
)大于不存在身体部位100时的时间可变性var(t
a
)、var(f
a
)。本技术人已经认识到,可以将图2中的信号f、t
ir
的一个或更多个特征用于区分身体部位100的存在与不存在,从而使得能够自动评估温度信号t
ir
。
61.图3例示了根据本发明的实施方式的用于温度确定的方法300。方法300是在用于确定vpt的测试过程开始之前的准备阶段期间执行的。在该准备阶段(举例来说,如在前述wo2006/046901中所公开的),通常的做法是测试受试者将身体部位100定位在探头端部5a上并施加处于预定的力范围内的纵向力。在准备阶段期间,振动计1可以通过经由反馈装置9提供关于施加的力的实时反馈来辅助测试受试者。可以将方法300与这种力调节过程并行或串行地执行。在步骤301中,从免接触温度传感器13的温度信号t
ir
获得第一测量数据。在可选(参见下文)的步骤302中,从力传感器7的力信号f获得第二测量数据。第一测量数据和第二测量数据包括相应信号t
ir
、f的一个或更多个信号值。
62.在步骤303中,基于第一测量数据和/或第二测量数据来计算一个或更多个特征参数。计算相应的特征参数,以产生表示身体部位100的存在或不存在的一个或更多个特征值。特征参数可以属于不同的类别。在第一类别中,特征参数表示温度信号t
ir
中的当前可变性,例如,在预定义或选定的时间窗δt内(图2)。可变性可以表示时域中的信号t
ir
(“时间可变性”),并且可以由任何合适的统计可变性或离差度量(诸如标准偏差、方差、范围或四分位距、平均偏差、平均绝对差等)及其归一化变体给出。另选地或者另外,可变性可以表示频域中的信号t
ir
(“频谱可变性”),并且同样可以由这种统计可变性度量给出。还可想到,频谱可变性可以由频域中的信号t
ir
的形状(例如,包括根据频率的幅度值的直方图),或者预定的频率范围中的平均幅度,或者信号t
ir
中的最大可变性的频率或频率范围来给出。在第二类别中,特征参数表示温度信号t
ir
中的当前时间梯度,例如,在时间窗δt内。梯度表示变化率(每单位时间的信号变化),并且可以另选地被表示为“导数”。梯度的计算可以涉及也可以不涉及温度信号t
ir
的低通滤波。可以使用任何可想到的梯度计算函数。在第三类别中,特征参数表示温度信号t
ir
的当前幅度,例如由单个值或者例如在时间窗δt内的多个信号值的平均值给出。
63.前述第一至第三类别的特征参数同样适用于力信号,并因此可以针对力信号f进行计算。
64.在步骤304中,对所述一个或更多个特征参数进行评估,以检测身体部位100的存在。步骤304可以涉及将各个所计算出的特征参数与相应的基准(例如指示身体部位存在或不存在的范围)进行比较。该范围可以是预定的或者是根据相应的信号t
ir
、f确定的。该范围可以是开放的或者是由最小阈值和最大阈值来定义的。举例来说,如根据图2所理解的,如果温度信号t
ir
的当前幅度超过最小温度阈值t
min
,或者如果当前幅度落入t
min
与t
max
之间的温度范围内,则可以指示存在。相应地,如果力信号f的当前幅度超过最小力值f
min
,则可以指示存在。在另一示例中,如果当前梯度超过梯度阈值,则可以指示存在,该梯度阈值被设定成检测温度信号t
ir
或力信号f的阶跃变化。在又一示例中,当可变性超过可变性阈值时可以指示存在。在特征参数表示频域中的形状的示例中,步骤304中的基准可以包括一个或更
多个形状基准,例如相应的基准直方图或其代表值,并且可以根据特征参数与形状基准之间的偏差量来指示存在。
65.步骤303可以计算用于步骤304进行评估的两个或更多个特征参数,该步骤304仅在所有特征参数均指示存在身体部位100时才确定这种存在。可以将特征参数计算为在时间上(例如对于共同时段(参照图2中的δt))基本并发的。然而,如下进一步举例说明的,同样可想到,将特征参数计算成表示两个单独的时间点。根据特征参数的类别,步骤303计算用于表示信号t
ir
、f这两者的特征参数可能是有利的,使得在步骤304确定身体部位100的存在之前需要在两个信号中指示存在。另选地或者另外,步骤303计算不同类别的特征参数可能是有利的。还可想到,由根据信号t
ir
、f中的一个或两个信号导出的度量的组合来给出一个特征参数。例如,可以将这种复合特征参数形成为信号t
ir
、f中的一个信号的当前幅度和当前可变性的(加权)组合,或者信号t
ir
、f中的各个信号中的当前可变性的(加权)组合。
66.如果步骤304确定身体部位100存在,则该方法进行至步骤305,该步骤将皮肤温度设定成温度信号t
ir
的当前幅度。步骤305可以计算信号t
ir
的当前幅度,或者如果该当前幅度是由步骤303计算出的,则使用已经计算出的幅度。
67.如果步骤304未能确定身体部位100存在,则该方法进行至步骤306,该步骤将环境温度设定成温度信号t
ir
的当前幅度。在步骤306之后,该方法返回至步骤s301。
68.图3的方法300假定环境温度将会在皮肤温度之前加以确定。如果在身体部位100不可能位于探头5上时,在振动计1启动时执行方法300,那么这是合理的假设。因此,当在步骤305中设定了皮肤温度时,该方法进行至步骤307,该步骤验证当前皮肤温度落入第一预定的范围内,例如根据上面提及的iso标准的27℃至35℃。步骤307还可以验证当前环境温度落入第二预定的范围内,例如根据iso标准的20℃至30℃。如果步骤307的验证失败,则该方法返回至步骤s301。可选地,如果验证失败或失败了预定的次数,则方法300可以经由反馈装置9通知测试受试者,并且提供用于改变环境温度和/或皮肤温度的指令。如果在步骤307中验证成功,则该方法进行至步骤308以开始测试过程,可选地经受通过输入装置8输入的命令。
69.方法300有助于测量皮肤温度,并且可以在准备测试过程中,在将身体部位100与探头端部5a接合的正常过程期间执行。方法300可以是自动的并且是在不需要向测试受试者提供专用指令以及身体部位100与传感器13之间没有物理接触的情况下执行的。皮肤温度的测量甚至可以在受试者不知道的情况下来执行。
70.如果特征参数表示两个信号t
ir
、f,则在步骤304中的存在验证产生了验证身体部位100被正确定向并定位于振动计1上的附加优点。这是相关的,因为振动计通常限定用于身体部位100的专用支承表面(参照图5中的17),以确保以一致且可重复的方式来测量vpt。然而,常规的振动计不会验证主体部分100相对于支承表面的定位。
71.尽管图3中未示出,但是可想到,控制单元在测试过程期间,即,在步骤308之后继续测量皮肤温度。皮肤温度的这种连续测量可以涉及对应于步骤301至305的步骤,这些步骤验证身体部位100的连续存以及确定皮肤温度。如果验证失败或者如果皮肤温度超出范围(参照步骤307),则可以终止测试过程。可以注意到,与测试过程之前的准备阶段相比,在测试过程期间可以计算不同的特征参数。例如,连续存在不产生阶跃变化(图2),因此梯度类别作为该阶段的存在指示符是无用的。
72.下面,将参照图4a至图4f的流程图来描述图3的方法300的几个非限制性实现。在以下示例中,信号的幅度由重音符号“^”指定。
73.图4a的方法400通过使用关于基准值t
ref
(幅度阈值)的温度信号t
ir
的幅度来确定存在。步骤401从传感器14(图1)获得辅助温度信号t
aux
的幅度步骤402根据来计算基准值t
ref
,例如通过将基准值t
ref
设定成或者相对于该来设定基准值。如上所提到的,传感器14测量壳体2内部的温度,该温度因振动计电子器件发射的热而可能超过振动计1周围的环境温度。例如,步骤402可以通过向添加预定的偏移量来设定t
ref
。步骤403获得温度信号t
ir
的当前幅度步骤404将特征参数值与基准值t
ref
进行比较。如果未超过t
ref
,则方法400进行至步骤405,该步骤将环境温度t
amb
设定成然后返回至步骤401。如果在步骤404中,超过t
ref
,则检测到身体部位存在,并且方法400进行至步骤406,该步骤将皮肤温度t
skin
设定成然后,步骤407例如通过验证t
skin
和t
amb
是可接受的,来评估测试过程是否可以开始。如果步骤407的评估失败,则方法400返回至步骤401,可选地在反馈装置9上呈现失败的原因之后,方法返回至步骤401。如果步骤407成功,则该方法进行至测试过程的启动。
74.图4b的方法410通过使用温度信号t
ir
的可变性来确定存在。步骤411获得温度信号t
ir
的当前幅度步骤412获得温度信号t
ir
的当前可变性。步骤413将该特征参数值var(t
ir
)与可以从存储器12(图1)获得的预定的可变性阈值th1进行比较。如果var(t
ir
)未超过th1,则方法410进行至步骤414,该步骤将环境温度t
amb
设定成然后返回至步骤411。如果var(t
ir
)超过th1,则该方法进行至步骤415,该步骤检查是否落入以t
min
和t
max
为界的预定的范围内(参照图2)。该预定的范围可以定义允许的皮肤温度,例如由上面提及的标准给出的皮肤温度。如果处于该预定的范围之外,则步骤415经由步骤416(该步骤在反馈装置9上输出皮肤温度处于范围之外的警告)返回至步骤411。否则,方法400进行至步骤417,该步骤将皮肤温度t
skin
设定成然后在步骤418开始测试过程。
75.图4c的方法420通过使用温度信号t
ir
的可变性和梯度来确定存在。该方法包括用于确定一个或更多个基线值的基准阶段i。例如在方法420开始,当可以安全地假定身体部位100不存在并且包括步骤421至423时,执行该基准阶段i。步骤421获得由温度信号t
ir
的幅度给出的基线幅度t
ir,0
。步骤422通过计算温度信号t
ir
的可变性获得基线可变性。回到图2,基线可变性对应于var(t
a
)。步骤423根据基线可变性来设定可变性阈值th2。例如,步骤423可以例如通过添加预定的偏移量,来将th2设定为等于或高于基线可变性。然后,该方法进行至步骤424,该步骤获得温度信号t
ir
的当前幅度当前可变性var(t
ir
)以及当前梯度grad(t
ir
)。步骤425将该特征参数值grad(t
ir
)与可以从存储器12获得的预定的梯度阈值th1进行比较。如果grad(t
ir
)未超过th1,则方法进行至步骤426,该步骤将环境温度t
amb
设定成然后返回至步骤424。如果grad(t
ir
)超过th1,则该方法进行至步骤427,该步骤将特征参数值var(t
ir
)与可变性阈值th2进行比较。如果var(t
ir
)未超过th2,则方法进行至步骤
426,该步骤将环境温度t
amb
设定成然后返回至步骤424。如果var(t
ir
)超过th2,则该方法进行至步骤428,该步骤可以对应于图4b的步骤415。如果步骤428的比较失败,则该方法经由步骤429(该步骤可以对应于图4b的步骤416)返回至步骤424。否则,方法400进行至步骤430,该步骤将皮肤温度t
skin
设定成然后在步骤431开始测试过程。在变型例中,var(t
ir
)是在步骤425与427之间的单独步骤中获得的,以使针对信号t
ir
中的单独时间段(窗)来获得grad(t
ir
)和var(t
ir
)。由此,参照图2,步骤425可以检测阶跃变化,并且步骤427可以检测阶跃变化之后的增加的可变性。
76.图4d的方法440通过使用力信号f的幅度和可变性来确定存在。步骤441获得力信号f的当前幅度步骤442获得力信号f的当前可变性var(f)。步骤443获得温度信号t
ir
的幅展步骤444将特征参数值与可以从存储器12获得的预定的幅度阈值th1进行比较。th1可以对应于图2的f
min
。如果未超过th1,则方法440进行至步骤445,该步骤将环境温度t
amb
设定成然后返回至步骤441。如果超过th1,则方法进行至步骤446,该步骤将特征参数值var(f)与可以从存储器12获得的预定的可变性阈值th2进行比较。另选地,可以在与图4c的th1相对应的基准阶段期间获得th2(步骤422至423)。如果var(f)未超过th2,则方法进行至步骤445,该步骤将环境温度t
amb
设定成然后返回至步骤441。如果var(f)超过th2,则该方法进行至步骤447,该步骤可以对应于图4b的步骤415。如果步骤447的比较失败,则该方法经由步骤448(该步骤可以对应于图4b的步骤416)返回至步骤441。否则,方法400进行至步骤449,该步骤将皮肤温度t
skin
设定成然后在步骤450开始测试过程。
77.图4e的方法460通过使用力信号f的幅度以及温度信号t
ir
的梯度来确定存在。步骤461获得力信号f的当前幅度步骤462获得温度信号f的当前梯度grad(t
ir
)。步骤463获得温度信号t
ir
的幅度步骤464将特征参数值与可以从存储器12获得的预定的幅度阈值th1进行比较。th1可以对应于图2的f
min
。如果未超过th1,则方法进行至步骤465,该步骤将环境温度t
amb
设定成然后返回至步骤461。如果超过th1,则方法进行至步骤466,该步骤将特征参数值grad(t
ir
)与可以从存储器12获得的预定的可变性阈值th2进行比较。如果grad(t
ir
)未超过th2,则方法进行至步骤465,该步骤将环境温度t
amb
设定成然后返回至步骤461。如果grad(t
ir
)超过th2,则该方法进行至步骤467,该步骤可以对应于图4b的步骤415。如果步骤467的比较失败,则该方法经由步骤468(该步骤可以对应于图4b的步骤416)返回至步骤461。否则,方法400进行至步骤469,该步骤将皮肤温度t
skin
设定成然后在步骤470开始测试过程。
78.图4f的方法480使用温度信号t
ir
的可变性作为用于检测身体部位的存在的特征参数,并且选择性地启用专用热源以增强可变性,从而有助于检测存在。图5示出了具有这种热源15的振动计1的实施方式。热源15与壳体2中的第三开孔3c对准,并且被定向成在传感器13的视场13a内发射热(ir辐射)。因此,当将热源15启用并且身体部位100位于视场13a内时,传感器13将检测所发射的热。如在图5中指示的,控制单元10可以通过控制信号c
h
来控
制热源15的启用。在步骤481中,将热源15重复地接通和断开(“切换”),以便在时间窗δt(图2)内导致增加的可变性。与步骤481并发地,步骤482计算温度信号t
ir
的当前可变性var(t
ir
)。在步骤483中,将热源15停用,并且步骤484获得温度信号t
ir
的当前幅度然后,方法进行至步骤485,该步骤将特征参数值var(t
ir
)与可以从存储器12获得的预定的可变性阈值th1进行比较。另选地,可以在与图4c的th1相对应的基准阶段期间获得th1(步骤421至422)。如果var(t
ir
)未超过th1,则方法进行至步骤486,该步骤将当前环境温度t
amb
设定成然后返回至步骤481。如果var(t
ir
)超过th1,则该方法进行至步骤487,该步骤可以对应于图4b的步骤415。如果步骤487的比较失败,则该方法经由步骤488(该步骤可以对应于图4b的步骤416)返回至步骤481。否则,方法400进行至步骤489,该步骤将皮肤温度t
skin
设定成然后在步骤490开始测试过程。在另选例中,步骤482确定信号t
ir
的一个或更多个主频,并且步骤485将所述一个或更多个主频与已知切换频率(即,将热源15接通和断开的频率)进行比较。仅当主频基本上对应于该切换频率时,步骤485进行至步骤487。
79.在方法480的变型例中,步骤482随着热源15被接通而获得温度信号t
ir
的梯度,并且步骤485将该梯度与预定的梯度阈值进行比较。在另一变型例中,步骤482在热源15已经被接通时获得温度信号t
ir
的幅值,并且步骤485将该幅值与幅值阈值进行比较,该幅值阈值可以是预定的或者是由步骤484获得的幅值给出的。在这些型例中,步骤481不需要将热源15重复地接通和断开,因为步骤481仅将热源15接通一次就足够了。可以通过步骤485评估可变性、梯度以及幅度的任何组合。目前认为最稳健的存在检测是通过使用可变性获得的。
80.除了力信号f和/或温度信号t
ir
之外,存在检测的评估还可以涉及一个或更多个另外的信号的信号分析。在图5的实施方式中,壳体2限定用于身体部位100(例如用于手掌(如图所示)或脚跟)的支承表面17。将接触传感器16定位成,生成指示身体部位100与支承表面17之间的接触的输出信号c1。控制单元10(图1)因此可以通过输出信号c1的分析来推断身体部位100与支承表面17接触。通过验证与支承表面17的接触以及探头尖端5a上的存在(基于力信号)和/或温度传感器13前方的存在(基于温度信号),进一步确保在确定皮肤温度并开始测试过程之前,将身体部位100正确地定向于振动计1上。
81.在图5的示例中,传感器16是机械开关,该传感器与壳体2中的第四开孔3d对准,以在将身体部位100置于支承表面17上时与该身体部位100接合。在变型例中(未示出),传感器16是温度传感器,其中,只要根据图3至图4的实施方式中的任一实施方式已经基于特征参数检测到存在,控制单元10就可以在输出信号c1的幅度基本上等于(例如,在
±
1℃至
±
3℃内)温度信号t
ir
的幅度时,推断在支承表面17上存在身体部位100。在变型例中(未示出),传感器16是位于支承表面17下方的免接触电容式传感器。在该变型例中,开孔3d是可选的。
82.在本文所公开的全部实施方式中,力信号f可以由指示身体部位200与探头端部5a之间的接触的接触信号c2来替换或加以补充。该接触信号c2可以由触摸或接触传感器18来提供,该触摸或接触传感器被配置成对身体部位100接触探头端部5a进行检测,如在图5中指示的。传感器18可以是被至少电联接至探头端部5a的导电式或电容式传感器。在另一变型例中,传感器18通过感测磁场的变化来检测触摸/接触。
83.图6例示了方法600,该方法通过使用图5的传感器18的接触信号c2来检测身体部位100的存在,并且可选地通过使用图5的传感器16的接触信号c1来验证身体部位100的取
向。步骤601获得温度信号t
ir
,步骤602获得接触信号c2。步骤603是可选的并且获得接触信号c1。步骤604基于接触信号c2的测量数据,并且可选地基于温度信号t
ir
的并发测量数据,来计算用于存在检测的一个或更多个特征参数。步骤605对这些特征参数进行评估,以用于检测身体部位100的存在。通过将力信号f替换成接触信号c2,可以与图3的方法300的步骤303至304相对应地执行步骤604至605。如果步骤605发现身体部位100不存在,则方法进行至步骤606,该步骤将环境温度t
amb
设定成并且返回至步骤601。如果步骤605发现身体部位100存在,则该方法进行至步骤607(可选),该步骤评估针对身体部位100与支承表面17之间的接触的信号c1。如果步骤607发现身体部位100未接触表面17,则该方法返回至步骤601,可选地在指令测试受试者重新定位身体部位100之后返回至步骤601。如果步骤607检测到身体部位100与表面17之间的接触,则该方法断定身体部位100被正确地定向和定位,并且进行至步骤608至610(这些步骤对应于图3的步骤307至309)。
84.在一些实施方式中,身体部位100存在于传感器13的视场13a内可以基于辐射检测器的输出信号来推断,该辐射检测器被配置成,针对环境辐射(即,来自振动计1的周围的传入辐射)来检测身体部位100的阴影。在图5中,标号15可以指定生成输出信号s的这种“阴影检测器”。阴影检测器15限定了至少部分地与传感器13的视场13a重叠的视场15a。阴影检测器15因此能够以零维、一维或二维来感测当身体部位100位于视场15a内时由该身体部位对环境光的部分阻挡。因此,为了提高存在检测,可以将输出信号s结合t
ir
和/或f和/或c2的特征参数来进行评估以检测身体部位100。在一个实施方式中,阴影检测器15至少部分地响应处于与温度传感器13不同的波长范围内(例如,处于约380nm至780nm的可见波长范围内)的辐射。
85.在附加方面,对身体部位100的存在的检测主要基于阴影检测器15的输出信号s,可选地通过对t
ir
和/或f和/或c2的特征参数的评估来加以补充。该附加方面可以通过修改图6的方法600来实现,以使步骤602获得阴影信号s,步骤604对该阴影信号s进行处理,以检测视场15a内的身体部位100,并且步骤605对于身体部位100的存在来评估步骤604的结果。步骤604可以可选地计算t
ir
和/或f和/或c2的一个或更多个特征参数,并且步骤605可以可选地仅当步骤604的结果和特征参数两者均指示存在身体部位100时才确定存在身体部位100。
86.虽然本发明已经结合当前被视为最实际且优选的实施方式进行了描述,但是要理解,本发明不限于所公开的实施方式,而且,正相反,其旨在覆盖被包括在所附权利要求的精神和范围内的各种修改例和等同布置。
87.此外,虽然在附图中按特定次序描绘了多个操作,但是这不应被理解为需要按所示特定次序或者按顺序次序执行这种操作,或者执行所有例示的操作来实现希望结果。在某些情况下,并行处理可能是有利的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。