1.本发明涉及检测机器人技术领域,具体为一种检测机器人及其检测方法。
背景技术:
2.在电机生产制备的过程中,需要对零部件进行检测,以保障后期电机组装后的工作稳定性,如果在制备的过程中不进行检测,会直接影响后期电机的使用寿命;现有的检测设备结构简单,将工件放置在检测设备商即可进行检测,但是当工件的结构大小不一致时,检测的调节性能以及精准度会受到一定程度的影响;同时在对工件进行检测时,由于工件的外表面残留一定的杂质,会直接影响扫描精准度,因此为了满足上述需求,需要一种检测机器人。
技术实现要素:
3.发明目的:提供一种检测机器人,解决现有的检测设备结构简单,将工件放置在检测设备商即可进行检测,但是当工件的结构大小不一致时,检测的调节性能以及精准度会受到一定程度的影响的问题。
4.目的之二在于解决在对工件进行检测时,由于工件的外表面残留一定的杂质,会直接影响扫描精准度的问题。
5.为实现上述目的,本发明提供如下技术方案:一种检测机器人,包括:设置为可调结构、用以待检测工件进行清洁的清洁结构,设置有两个、沿所述清洁结构的中心向外侧等距延伸预定距离安装的检测结构,以及与所述检测结构固定、用以进行检测后的输送放置的输送结构,所述清洁组件的单侧周向外径大于检测结构的外径。
6.通过安装有两个检测结构,能够同时进行两个工件的检测,在一定程度上提升检测的效率,同时通过设置有清洁结构和输送结构,能够在检测前以及检测后对外表面进行清洁,以保障检测的精准度以及工件的清洁性能,后期的输送进行组装性能更加完善,整体的结构性能更加简单全面,实用性更高。
7.根据本技术实施例的一个方面,所述清洁结构包括:设置为四点支撑结构、用以对整体检测结构进行支撑固定的支撑架,与所述支撑架螺接、用以对工件进行检测的检测结构,与所述检测结构卡接、用以进行工件的放置限位的放置调节结构,以及与所述检测结构插接、用以对工件的一角进行限位、达到定位效果的定位固定架,所述放置调节结构设置有电磁块,能够保障对工件的固定限位性能。
8.通过支撑架、检测结构、放置结构以及定位固定架,能够使得检测结构在工作时,更加稳定,同时放置调节结构的调节稳定性更高,结构性能更加稳定完善,电磁块对工件的边缘进行吸附,在不影响检测性能的同时保障固定性能。
9.根据本技术实施例的一个方面,所述放置调节结构包括:设置为矩形、一体注塑成型的支撑检测座,与所述支撑检测座固定、用以提升拆卸手持灵活性的固定拉把,开设于所
述支撑检测座上端、用以提供组件工作所需空间的工作腔,以及一端与所述支撑检测座螺接、另一端与所述下料顶板通过转动安装组件转动连接的顶出组件。
10.通过顶出组件的伸缩带动下料顶板进行伸缩,能够在工件放置检测完成后,通过顶出,使得工件滑动至输送结构进行输送,同时在工作腔内部安装检测组件,以保障对工件的检测性能,使用起来更加便捷省事,实用性更高。
11.根据本技术实施例的一个方面,所述检测结构包括:与所述检测结构基座卡槽连接,用以检测工件的水平度的水平检测模块,设置有两个,与所述检测结构基座卡槽连接,用以进行工件重量检测的重量检测模块,以及开设于所述水平检测模块和重量检测模块上、用以与延伸检测组件配合的检测延伸孔。
12.通过安装有水平检测模块和重量检测模块,与放置调节结构相固定,放置调节结构下端的延伸检测端延伸至检测延伸孔内部,以保障检测组件检测的精准度,能够更好地了解重量以及水平度。
13.根据本技术实施例的一个方面,所述输送结构包括:与所述检测结构的输出端位置相对、与其螺接、用以进行工件的输送导向的输送斜台,与所述输送斜台的输出端位置相对、用以进行输送定位的放置平台,以及与所述输送斜台粘贴连接、上端面与所述放置平台的一端持平、用以进行工件缓冲防撞的防撞软垫。
14.通过安装有输送斜台、放置平台以及防撞软垫,能够在工件需要进行输送进行后期装配时,通过顶出工件,使得工件滑动至放置平台,再进行传送即可。
15.根据本技术实施例的一个方面,所述清洁结构包括:由若干个调节组件组成、用以带动清洁组件进行位置的调节的调节结构,与所述调节结构的输出端固定、用以对工件外表面进行清洁的清洁组件。
16.通过在下端设置可移动支撑结构,能够提升对清洁结构整体的支撑性能,同时下端设置有万向轮,能够进行位置的微调以及锁紧,结构简单,通过设置有调节组件和清洁组件,能够使得对工件的清洁性能更加全面,可以根据工件的高度对清洁的高度进行调节。
17.根据本技术实施例的一个方面,所述调节结构包括:与所述调节结构下端底板固定、用以带动上方组件进行转动的转动电机,与所述转动电机输出轴固定、用于与上方组件进行固定、保障传动稳定性的转动连接轴,一端与所述转动连接轴固定、用以对清洁组件的清洁高度进行调节的伸缩组件,以及与所述伸缩组件的另一端固定、同时另一端与清洁组件的一端卡接、以保障传动性能的传动连接卡块。
18.通过安装有转动调节结构以及伸缩结构,能够通过伸缩组件进行清洁组件高度的调节,同时通过转动组件带动清洁组件进行转动清洁,以保障整体结构的使用性能以及灵活性。
19.根据本技术实施例的一个方面,所述清洁组件包括:设置为内部镂空型、用以保障清洁液的存储性能的清洁固定壳体,通过与清洁液管道或者清洁液储存罐连接以保障后期的清洁液填充性能的连接组件,设置在所述清洁固定壳体与工件接触端、用以对工件进行清洁的清洁组件。
20.通过安装有连接组件以及清洁组件,能够使得对工件的清洁性能得到更好地保障,使用起来更加便捷省事。
21.一种检测机器人及其检测方法,包括以下步骤:
s1、将需要进行检测的工件放置在检测结构上方下料顶板上,一角与定位固定架对齐,对齐后通过检测组件进行检测即可;s2、通过清洁组件对工件的上端面进行清洁,进一步保障工件检测的全面,检测更加便捷;s3、检测完成后通过下料顶板顶出工件,滑落至输送斜台上方,进行下一步的输送加工;s4、重复进行放置检测动作即可。
22.与现有技术相比,本发明的有益效果是:通过安装有两个检测结构,能够形成两个检测流水线,能够在一定程度上提升检测效率,同时通过安装有清洁结构能够对工件进行表面的清洁,通过检测结构内部的组件保障全方位检测性能,解决了上述提出的问题。
附图说明
23.图1为本发明一种检测机器人的立体图。
24.图2为本发明调节结构的立体图。
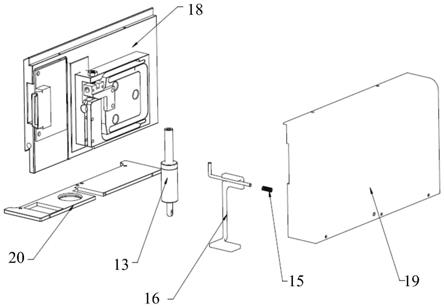
25.图3为本发明放置调节结构的立体图。
26.图4为本发明检测结构的立体图。
27.图5为本发明清洁组件的立体图。
28.图中:检测结构1、支撑架101、检测结构102、重量检测模块1021、水平检测模块1022、检测延伸孔1023、放置调节结构103、支撑检测座1031、固定拉把1032、工作腔1033、顶出组件1034、转动安装组件1035、下料顶板104、定位固定架105、输送结构2、输送斜台201、放置平台202、防撞软垫203、清洁结构3、调节结构301、转动电机3011、转动连接轴3012、伸缩组件3013、传动连接卡块3014、清洁组件302、清洁固定壳体3021、延伸管道3022、连接内管3023、隔板3024、蓄水腔3025、滤水孔3026、擦拭棉片3027。
具体实施方式
29.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
30.申请人认为,市场上的电机生产制备的过程中,需要对零部件进行检测,以保障后期电机组装后的工作稳定性,但是现有的检测设备结构简单,将工件放置在检测设备商即可进行检测,但是当工件的结构大小不一致时,检测的调节性能以及精准度会受到一定程度的影响,同时在对工件进行检测时,由于工件的外表面残留一定的杂质,会直接影响扫描精准度,后期组装性能也不够全面。
31.为此,申请人设计一种检测机器人,由检测结构、输送结构和清洁结构组成,通过清洁结构在检测结构检测前以及检测后进行外表面的清洁、能够在一定程度上提升检测的精度,同时通过输送结构对工件进行输送,以提升后期组装的流水输送性能,通过检测结构内部的检测组件,在放置后进行扫描检测以及重量水平度检测,以达到预定的全方位检测
效果。
32.本发明涉及的检测机器人,在实际应用中,如图1至图5所示,包括检测结构1、输送结构2和清洁结构3,其中检测结构1包括:检测结构1、支撑架101、检测结构102、放置调节结构103、下料顶板104和定位固定架105,支撑架101的上方安装有检测结构102,检测结构102的上方安装有放置调节结构103,放置调节结构103上方的中间位置处安装有下料顶板104,下料顶板104的一侧边角设置有定位固定架105,定位固定架105与放置调节结构103上下滑动连接。
33.在实际使用过程中,由于工件的尺寸结构大小不一致,因此需要对工件进行定位以达到后期检测定位的性能,如若将检测平台直接设置为一个平面不进行定位会直接导致工件的放置位置出现偏差,从而后期检测的对准度不高,整体检测扫描的基准也不好找,因此通过设置定位固定架105对工件的一角进行定位,不论矩形工件的大小,将一角直接卡入定位固定架105内部进行定位,再通过检测结构102以及放置调节结构103内部设置的扫描组件进行扫描,以保障对工件的检测性能,同时将定位固定架105设置为可以上下调节,能够在下料顶板104顶出工件时,通过收缩定位固定架105以保障工件运动至输送结构2上。
34.在上述实施例中,进一步的,放置调节结构103包括支撑检测座1031、固定拉把1032、工作腔1033、顶出组件1034和转动安装组件1035,其中,支撑检测座1031的内部设置有工作腔1033,工作腔1033内部的一端安装有顶出组件1034,顶出组件1034与下料顶板104通过转动安装组件1035进行运动,进行一侧高度调节,使得下料顶板104的角度发生变化,从而使得工件具有滑动性能,同时工作腔1033内部安装有扫描模块,能够对工件进行扫描,以保障检测性能。
35.在上述实施例中,进一步的,检测结构102包括:重量检测模块1021、水平检测模块1022和检测延伸孔1023 ,其中,检测结构102内部的中间位置处安装有水平检测模块1022,水平检测模块1022的两侧均安装有重量检测模块1021,重量检测模块1021和水平检测模块1022上均设置有检测延伸孔1023。
36.在实际使用过程中,将放置调节结构103与检测结构102卡接,放置调节结构103下端的配合检测组件延伸至检测延伸孔1023内部,同时放置调节结构103具有一定的弹性,能够在工件放置在放置调节结构103上方时,通过放置调节结构103向下运动一定的行程,组件延伸至检测延伸孔1023内部,对工件的重量以及水平度进行了解,达到检测的效果,能够减小工作所需工件,在扫描的同时完成重量检测,无需进行二次检测操作,节省了空间并且提升了检测效率。
37.本发明涉及的检测机器人,在实际应用中,如图1至图5所示,输送结构2包括输送斜台201、放置平台202和防撞软垫203,其中,输送斜台201与检测结构1的输出端位置相对,能够在下料顶板104顶出工件时,工件顺势滑动至输送斜台201上方,再运动至放置平台202上,以便后期进行传动输送,输送斜台201的输出端安装有放置平台202,输送斜台201上安装有防撞软垫203,防撞软垫203的一端与放置平台202位于同一水平面,避免在输送过程中出现凸台造成工件撞击,从而出现形变,结构简单,滑动输送的性能更加全面完善。
38.本发明涉及的检测机器人,在实际应用中,如图1至图5所示,清洁结构3包括:调节结构301和清洁组件302,调节结构301的下方安装有基座以及滑动轮,以保障结构的调节性能,进行位置的微调,调节结构301的上方安装有清洁组件302,清洁组件302与调节结构301
传动连接。
39.在上述实施例中,进一步的,调节结构301包括转动电机3011、转动连接轴3012、伸缩组件3013和传动连接卡块3014,其中,转动电机3011的上方安装有转动连接轴3012,转动连接轴3012的上方安装有伸缩组件3013,伸缩组件3013的上方安装有传动连接卡块3014。
40.在上述实施例中,进一步的,清洁组件302包括:清洁固定壳体3021、延伸管道3022、连接内管3023、隔板3024、蓄水腔3025、滤水孔3026和擦拭棉片3027,其中,清洁组件302上端的两侧均设置有连接内管3023,连接内管3023的下方安装有延伸管道3022,清洁固定壳体3021内部的中间位置处安装有隔板3024,隔板3024的两侧均安装有蓄水腔3025,清洁固定壳体3021下端的两侧均设置有滤水孔3026,滤水孔3026设置有若干个,且若干个滤水孔3026依次分布,滤水孔3026的下方安装有擦拭棉片3027。
41.在实际使用过程中,当工件需要放置在检测结构1上时,通过工件烧扫描得出的厚度,控制器驱动伸缩组件3013开始伸缩,调节清洁组件302的高度,能够使得擦拭棉片3027的擦拭高度刚好位于工件上端,在擦拭过程中,通过下压擦拭棉片3027,使得与工件外表面接触,内部的清洁液体从滤水孔3026渗出,保障清洁性能,同时通过设置延伸管道3022和连接内管3023,可以根据实际工况选择直接连接清洁液管道,或者将装满清洁液的罐体与连接内管3023转动进行连接,同时可以通过转动电机3011的输出轴带动上方的转动连接轴3012、伸缩组件3013和传动连接卡块3014进行转动,从而使得调节清洁组件302开始转动,能够保障对工件的端面进行全方位擦拭。
42.由于将单侧调节清洁组件302的长度大于检测结构的最大径,不论工件的尺寸大小均可以进行清洁,相较于传统的清洁结构,能够适用于不同工件大小的工况,同时擦拭棉片3027与清洁固定壳体3021粘接,能够在使用过程中进行拆卸,避免使用时间过长后,更换不便,使用起来更加便捷省事,实用性更高。
43.一种检测机器人及其检测方法,包括以下步骤:s1、将需要进行检测的工件放置在检测结构上方下料顶板上,一角与定位固定架对齐,对齐后通过检测组件进行检测,放置完成后,放置调节结构103具有一定的弹性,能够在工件放置在放置调节结构103上方时,通过放置调节结构103向下运动一定的行程,组件延伸至检测延伸孔1023内部,对工件的重量以及水平度进行了解,达到检测的效果。
44.s2、通过清洁组件对工件的上端面进行清洁,进一步保障工件检测的全面,检测更加便捷,在清洁过程中,通过工件烧扫描得出的厚度,控制器驱动伸缩组件3013开始伸缩,调节清洁组件302的高度,能够使得擦拭棉片3027的擦拭高度刚好位于工件上端,在擦拭过程中,通过下压擦拭棉片3027,使得与工件外表面接触,内部的清洁液体从滤水孔3026渗出,对工件的外表面进行清洁。
45.s3、检测完成后通过下料顶板104顶出工件,滑落至输送斜台201上方,进行下一步的输送加工,防撞软垫203能够对在下料顶板104顶出工件,工件滑动至防撞软垫203上,防撞软垫203具有一定的柔性,能够避免工件出现撞击,造成零部件形变;s4、重复进行放置检测动作即可。
46.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权
利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。