一种用于四头跟踪灌装机的v型机械手
技术领域
1.本实用新型属于机械设备制造技术领域,具体涉及一种用于四头跟踪灌装机的v型机械手。
背景技术:
2.沐浴露、洗发水、洗衣液等液体产品一般采用瓶装方式分包灌装,通过四头跟踪灌装机自动输送待灌装的空灌装瓶,并自动完成液体产品灌装和旋紧瓶盖操作过程;输送空灌装瓶时需通过机械手固定夹持移动中的空灌装瓶瓶颈部,将空灌装瓶定位固定在灌装工位,并防止空灌装瓶摇晃移位,以便灌装机对灌装瓶内灌注液体产品;灌装瓶瓶颈部通常为圆筒形,传统设备中的机械手不能适应灌装瓶的颈部形状,对移动中的空灌装瓶定位夹持操作不方便,空灌装瓶未到达灌装工位或者超过了灌装工位均不能成功定位夹持灌装瓶,灌装机的灌装头不能准确灌注液体产品;空灌装瓶输送至灌装工位时定位不准确,灌装过程中定位夹持不稳定,液体产品易泄漏甚至翻倒,造成产品浪费,设备清理困难。
技术实现要素:
3.为了解决现有技术存在的上述问题,本实用新型目的在于提供一种能够准确定位夹持移动中的灌装瓶,定位准确,操作方便,用于四头跟踪灌装机的v型机械手。
4.本实用新型所采用的技术方案为:
5.一种用于四头跟踪灌装机的v型机械手,包括有四头跟踪灌装机的灌装头和安装架,灌装头沿竖直方向设置于安装架前侧,安装架下方沿水平方向对称设置有一对夹爪,一对夹爪相对端的端面中心位置分别向内凹陷形成横向v形凹槽,构成一对v形夹爪;一对v形夹爪通过驱动机构滑动安装于安装架上;一对v形夹爪的纵向中心线与灌装头轴心位于同一竖直平面内;每个v形夹爪的v形凹槽两端分别设置有一滑轮槽,每个滑轮槽内分别铰接安装有一滑轮。
6.每个滑轮分别为一轴承,每个轴承分别通过一竖向铰接轴铰接连接在v形夹爪端部。
7.每个轴承分别为686轴承,每个铰接轴分别为一内六角半圆头螺栓。
8.所述一对v形夹爪通过一手指气缸滑动安装于安装架上。
9.所述手指气缸通过安装板固定安装于安装架前端左侧下方,一对v形夹爪通过一对臂板分别固定安装于手指气缸两端的伸缩板上。
10.所述安装板为z形结构,安装板的上折边固定安装于安装架的左侧面上,安装板的下折边固定安装于手指气缸左侧面上,使得手指气缸位于安装架左侧下方。
11.所述安装板的下折边长度和高度尺寸与手指气缸的长度和高度尺寸互相一致。
12.每个臂板都为l形结构,每个臂板分别通过竖直边固定安装于手指气缸伸缩板上,每个v形夹爪分别通过螺栓固定安装于每个臂板的水平边下方。
13.每个v形夹爪分别为一矩形板,每个v形夹爪上分别设置有长圆形安装槽。
14.一对v形夹爪的对称中心线也与四头跟踪灌装机的灌装头轴心位于同一竖直平面内。
15.本实用新型的有益效果为:
16.一种用于四头跟踪灌装机的v型机械手,一对v形夹爪通过手指气缸滑动安装于安装架上,一对v形夹爪相对端的端面中部分别设置横向v形凹槽,在每个v形夹爪的v形凹槽两端分别设置一滑轮槽,在每个滑轮槽内分别铰接安装一滑轮;待灌装液体产品的灌装瓶沿生产线横向输送至一对v形夹爪之间时,手指气缸驱动一对v形夹爪相对滑动,通过一对v形凹槽配合从前后两侧同时夹持灌装瓶颈部,将空灌装瓶同轴定位固定在灌装工位,并防止空灌装瓶摇晃移位,便于灌装机对灌装瓶内灌注液体产品;横向v形凹槽能够适应不同规格的灌装瓶定位夹持需求;灌装瓶沿生产线输送时,能够准确定位夹持移动中的灌装瓶,即使灌装瓶与v形夹爪之间存在位置偏差,只要误差不大于灌装瓶颈部半径,通过v形凹槽两端的滑轮都能够将灌装瓶推回v形凹槽中心部位,使得灌装机的灌装头与灌装瓶轴心同轴,能够给灌装瓶准确灌注液体产品,不会泄漏,更不会翻倒,保持设备清洁无污染,定位准确,操作方便。
附图说明
17.图1~图3是本实用新型用于四头跟踪灌装机的v型机械手立体结构示意图;
18.图4~图5是本实用新型用于四头跟踪灌装机的v型机械手的一对v形夹爪立体结构放大示意图;
19.图6是本实用新型用于四头跟踪灌装机的v型机械手的一对v形夹爪平面结构放大示意图;
20.图7是图6的后视图;
21.图8是图6的a
‑
a剖面视图。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“竖直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
24.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
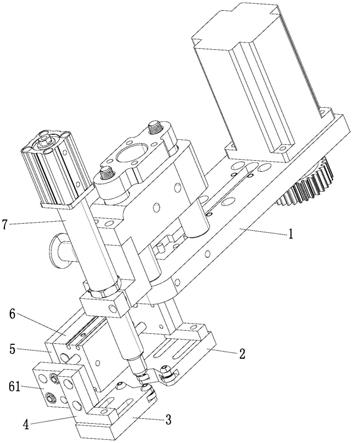
25.如图1所示,本实用新型一较佳实施方式提供一种用于四头跟踪灌装机的v型机械
手,首先在四头跟踪灌装机的输送通道一侧沿纵向固定设置一安装架1,通过安装架安装四头跟踪灌装机的灌装头,灌装头7沿竖直方向设置于安装架1的前侧,四头跟踪灌装机的输送通道对应于灌装头7下方的位置构成灌装工位;在安装架1的前端下方沿水平方向对称设置一对夹爪,一对夹爪相对端的端面中心位置分别向内凹陷形成横向v形凹槽11,构成一对v形夹爪,分别为前v形夹爪3和后v形夹爪2,前v形夹爪3和后v形夹爪2通过驱动机构滑动安装于安装架上,一对v形夹爪的纵向中心线与灌装头7的轴心位于同一竖直平面内;待灌装液体产品的空灌装瓶沿四头跟踪灌装机的输送通道横向输送至灌装头下方的灌装工位时,驱动机构驱动一对v形夹爪相对滑动,通过一对v形凹槽配合从前后两侧同时夹持灌装瓶颈部,将空灌装瓶定位固定在与灌装头同轴的灌装工位,并防止空灌装瓶摇晃移位,便于灌装机对灌装瓶内业准灌注液体产品;横向v形凹槽能够适应不同规格的灌装瓶定位夹持需求。
26.在每个v形夹爪的v形凹槽11两端分别设置一滑轮槽8,在每个滑轮槽8的内部分别铰接安装一滑轮10,滑轮10的外圆柱面与v形凹槽的侧面相切,滑轮10的外圆柱面受到径向推力时,能够驱动滑轮旋转;
27.灌装瓶沿生产线横向输送至灌装工位,当一对v形夹爪相对滑动夹持灌装瓶时,如果灌装瓶的轴心正好移动至与一对v形夹爪的纵向中心线和灌装头7的轴心位于同一竖直平面内,一对v形夹爪相对滑动,能够与灌装头同轴定位夹持灌装瓶,定位准确,确保灌装头能够准确灌装液体产品;
28.如果灌装瓶的轴心移动超过了一对v形夹爪的纵向中心线和灌装头7的轴心位置,一对v形夹爪延迟相对滑动夹持灌装瓶时,只要灌装瓶的轴心还未完全超出一对v形夹爪之间的位置,v形凹槽前端的滑轮能够与灌装瓶接触,滑轮在驱动机构的驱动作用力下产生旋转运动,从而推动灌装瓶沿v形凹槽移动,直到将灌装瓶推回v形凹槽中心部位,使得灌装机的灌装头与灌装瓶轴心同轴,灌装瓶的轴心移动至与一对v形夹爪的纵向中心线和灌装头7的轴心位于同一竖直平面内,以便对v形夹爪同轴定位夹持灌装瓶,同样能够定位准确,确保灌装头能够准确灌装液体产品;
29.如果灌装瓶的轴心移动还未到达一对v形夹爪的纵向中心线和灌装头7的轴心位置,一对v形夹爪即相对滑动欲夹持灌装瓶时,只要灌装瓶的轴心已进入至一对v形夹爪之间的位置,v形凹槽后端的滑轮能够与灌装瓶接触,滑轮在驱动机构的驱动作用力下产生旋转运动,从而推动灌装瓶沿v形凹槽移动,直到将灌装瓶推回v形凹槽中心部位,使得灌装机的灌装头与灌装瓶轴心同轴,灌装瓶的轴心移动至与一对v形夹爪的纵向中心线和灌装头7的轴心位于同一竖直平面内,以便对v形夹爪同轴定位夹持灌装瓶,同样能够定位准确,确保灌装头能够准确灌装液体产品。
30.在一对v形夹爪延迟夹持灌装瓶、致使灌装瓶移动至其轴心完全超出一对v形夹爪之间的位置时,一对v形夹爪相对滑动时通过v形凹槽后端的滑轮将空灌装瓶推出至一对v形夹爪后端外部,手指气缸上的感应探测器感应探测至一对v形夹爪之间没有灌装瓶,则发出警报,灌装头不会启动灌装;
31.同样地,一对v形夹爪提前相对滑动欲夹持灌装瓶、而灌装瓶的轴心尚未进入至一对v形夹爪之间的位置时,一对v形夹爪相对滑动时通过其端的滑轮将空灌装瓶推出至一对v形夹爪前端外部,手指气缸上的感应探测器感应探测至一对v形夹爪之间没有灌装瓶,则发出警报,灌装头也不会启动灌装,系统运行稳定可靠。
32.进一步地,每个滑轮10分别为一轴承,每个轴承分别通过一竖向铰接轴9铰接连接在v形夹爪的端部,轴承旋转灵敏,摩擦阻力少。
33.轴承可以选择686轴承,铰接轴直接选择内六角半圆头螺栓,均匀标准件,产品工艺简单,成本低廉。
34.进一步地,一对v形夹爪通过一手指气缸6滑动安装于安装架1上。
35.手指气缸6的具体安装结构如下:手指气缸6通过安装板5固定安装于安装架1的前端左侧下方,一对v形夹爪通过一对臂板4分别固定安装于手指气缸6两端的伸缩板61上。
36.安装板5为z形结构,安装板5的上折边52固定安装于安装架1的左侧面上,安装板5的下折边53固定安装于手指气缸6左侧面上,使得手指气缸位于安装架左侧下方。
37.安装板5下折边53的长度和高度尺寸与手指气缸6侧面的长度和高度尺寸互相一致,安装后外形结构整齐排列。
38.每个臂板4都为l形结构,每个臂板4分别通过竖直边固定安装于手指气缸6的伸缩板61上,每个v形夹爪分别通过螺栓固定安装于每个臂板4的水平边下方;每个v形夹爪通过l形臂板4的水平边延伸至安装架前侧的灌装头下方的位置,一对v形夹爪的对称中心线与四头跟踪灌装机的灌装头轴心位于同一竖直平面内,使得一对v形夹爪相对滑动夹紧灌装瓶时,灌装瓶的轴心与灌装头的轴心位于同一直线上,即同轴。
39.最后,每个v形夹爪分别为一矩形板,在每个v形夹爪上分别设置长圆形安装槽12,每个v形夹爪与臂板的安装螺栓可以沿长圆形槽移动,以适应不同规格型号的液体产品灌装瓶的灌装定位需求。
40.一对v形夹爪通过手指气缸滑动安装于安装架上,一对v形夹爪相对端的端面中部分别设置横向v形凹槽,在每个v形夹爪的v形凹槽两端分别设置一滑轮槽,在每个滑轮槽内分别铰接安装一滑轮;待灌装液体产品的灌装瓶沿生产线横向输送至一对v形夹爪之间时,手指气缸驱动一对v形夹爪相对滑动,通过一对v形凹槽配合从前后两侧同时夹持灌装瓶颈部,将空灌装瓶定位固定在灌装工位,并防止空灌装瓶摇晃移位,便于灌装机对灌装瓶内灌注液体产品;横向v形凹槽能够适应不同规格的灌装瓶定位夹持需求;灌装瓶沿生产线输送时,能够准确定位夹持移动中的灌装瓶,即使灌装瓶与v形夹爪之间存在位置偏差,只要误差不大于灌装瓶颈部半径,通过v形凹槽两端的滑轮都能够将灌装瓶推回v形凹槽中心部位,使得灌装机的灌装头与灌装瓶轴心同轴,能够给灌装瓶准确灌注液体产品,不会泄漏,更不会翻倒,保持设备清洁无污染,定位准确,操作方便。
41.本实用新型不局限于上述可选实施方式,任何人在本实用新型的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是落入本实用新型权利要求界定范围内的技术方案,均落在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。