1.本发明属于船舶动力定位控制技术领域,具体为某半潜船自动定点混合控制模式(joystick auto surge&sway)的导引方法。
背景技术:
2.动力定位是一项在海洋工程中和深海开发中广泛使用的一种技术,目前全世界已经有超过2000艘具有动力定位系统的船舶,动力定位可以通过推进器保持位置和艏向于固定点或设定航迹上,并能够保证控制的精度,灵活有效,尤其是在锚泊受限的深海区,能够展现其强大的优势。目前,动力定位技术已经应用在了海洋铺管、深海吊装、海上钻井、穿梭邮轮、海上补给等多种作业任务。船舶上的动力定位系统极其复杂,与船舶上所有的设备相关,其中比较核心的为推进器系统和运动控制系统。
3.由于海洋环境极其复杂,推进器的效率也比较低,对船舶进行精确的控制会比较困难。并且近年加大了对海洋深度的探索,船舶的稳定性和控制精度也需要随之提高。因此,能够设计出一个高精度的控制器对于动力定位系统功能的提高有着非常重要的意义。本发明结合los导引算法和pid控制方法,推导出某半潜船joystick auto surge&sway混合控制模式的导引律,以解决混合控制模式下半潜船的路径导引问题。
技术实现要素:
4.本发明的目的主要针对半潜船的运动控制,因此提出一种动力定位船舶混合控制模式的导引方法,用于混合控制模式下半潜船的路径导引问题,并进行控制船舶位置姿态的仿真分析。
5.本发明的目的是这样实现的:
6.设计混合控制器与设计自动控制器有两点区别,第一点为混合控制器中速度反馈环的加入,第二点为混合控制器能够根据期望位置和los导引点得出期望视向点,并得出期望视向点与当前位置的差值。
7.动力定位系统能够输入艏向、纵向和横向方向上的控制命令,根据导引算法可以求出固定坐标系中的期望导引点,经由转换公式计算,求得船体坐标系下的期望船舶位姿,传递至运动控制器来进行控制。本设计方法能够控制船舶位姿,并且能够用操作手柄进行船舶运动的控制。半潜船运动导引律设计思路如下:
8.第一,半潜船动力学方程如下:
9.10.式中:h
xt
、h
yt
、h
nt
——作用在船体上力和力矩;
11.x
g
——船舶重心在x轴方向上的位置坐标。
12.第二,由公式(1)可以得到船舶的加速度及角加速度,积分可以求得船舶速度,控制器接收反馈信号,并由运动学方程计算固定坐标系下船舶速度,方程如下:
[0013][0014]
第三,由公式(2)可以得到固定坐标系下在三自由度方向上的船舶速度,积分可以求得船舶在固定坐标系中的位置并向控制器反馈。
[0015]
第四,由船舶期望位置和船舶实时位姿,求出导引点坐标(n
los
,e
los
)。
[0016]
为了计算出未知los点的坐标p
los
=(n
los
,e
los
),必须满足下面两式:
[0017]
(n
los
‑
n
t
)2 (e
los
‑
e
t
)2=r2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0018][0019]
式中:r——导引半径。
[0020]
另:e=n
k
,f=e
k
。
[0021]
定义下式:
[0022]
a=1 d2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0023]
b=2(dg
‑
de
t
‑
n
t
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0024][0025]
1)δn>0
[0026][0027]
e
los
=d(n
los
‑
n
k
) e
k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0028]
当δe=0时,e
los
=e
k
=e
k 1
。
[0029]
2)δn<0
[0030][0031]
e
los
=d(n
los
‑
n
k
) e
k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0032]
当δe=0时,e
los
=e
k
=e
k 1
。
[0033]
3)δn=0
[0034]
当δe=0时,e
los
=n
k
=n
k 1
。
[0035]
①
对于δe>0
[0036][0037]
②
对于δe<0
[0038][0039]
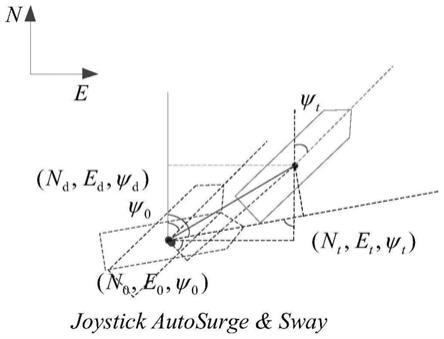
本发明中导引律为joystick auto sway&yaw模式导引律,设计方式如下:可以由auto position和joystick模式转入此模式。按下auto sway按钮和auto surge按钮后,指示灯开始闪烁,当速度比限定速度小时,auto sway按钮和auto surge按钮状态为常亮,对当前的位置和航向(n0,e0,ψ0)进行记录,此时auto sway和auto surge方向运动受限制,可操纵joystick控制船舶围绕控制点做旋转运动。此时船舶在围绕固定点的回转运动的导引律如下图1所示。
[0040]
图中,(n
t
,e
t
,ψ
t
)代表船舶当前位置,(n
d
,e
d
,ψ
d
)代表船舶的期望位置和航向;l
d
代表期望的导引路径,l
v
代表与期望路径垂直的路径,l
d
与l
v
相交点为d,代表船舶期望导引位置。
[0041]
船舶的期望航向可用下式表示:
[0042]
ψ
d
=ψ
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0043]
与上述情况类似,导引路径为:
[0044]
e
d
=e0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0045]
n
d
=n0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0046]
此种情况下的导引律由(14)、(15)和(16)组成。
[0047]
第五,pid控制的原理表达式如下:
[0048][0049]
式中:k
p
,k
i
,k
d
——各环节增益系数;k
p
——有差调节;k
i
——静差调节;k
d
——偏差变化率,
[0050]
由公式(17)进行三自由度方向上运动控制器的构建,操纵手柄能够通过对应不同的速度环来控制船舶三个自由度的速度。动力定位系统运动控制器由速度内环控制和位置外环控制来控制船舶运动。
[0051]
与现有技术相比,本发明的有益效果是:
[0052]
本发明所设计的控制器能够操纵joystick控制船舶围绕控制点做旋转运动,符合joystick auto surge&sway模式的要求。
附图说明
[0053]
图1是joystick auto surge&sway路径导引示意图。
具体实施方式
[0054]
下面结合附图与具体实施方式对本发明作进一步详细描述。
[0055]
第一步,确定半潜船各项参数信息,为混合控制模式导引律的计算做好准备。
[0056]
第二步,根据半潜船的各项参数信息,确定半潜船动力学方程。
[0057]
第三步,由半潜船的动力学方程得到船舶的加速度及角加速度,并进行积分,求得船舶三自由度速度。
[0058]
第四步,控制器接收反馈信号,并由运动学方程计算固定坐标系下船舶速度。
[0059]
第五步,对固定坐标系下在三自由度方向上的船舶速度进行积分,可以求得船舶在固定坐标系中的位置并向控制器反馈。
[0060]
第六步,根据北东坐标系下的期望位移指令和反馈的实时船舶位姿确定导引路径,得出路径导引公式。
[0061]
第七步,根据导引路径公式求出导引点坐标(n
los
,e
los
)。并进行导引律具体求解。
[0062]
第八步,进行三自由度方向上运动控制器的构建,操纵手柄能够通过对应不同的速度环来控制船舶三个自由度的速度。动力定位系统运动控制器由速度内环控制和位置外环控制来控制船舶运动。
[0063]
设计混合控制器与设计自动控制器有两点区别,第一点为混合控制器中速度反馈环的加入,第二点为混合控制器能够根据期望位置和los导引点得出期望视向点,并得出期望视向点与当前位置的差值。
[0064]
动力定位系统能够输入艏向、纵向和横向方向上的控制命令,根据导引算法可以求出固定坐标系中的期望导引点,经由转换公式计算,求得船体坐标系下的期望船舶位姿,传递至运动控制器来进行控制。本设计方法能够控制船舶位姿,并且能够用操作手柄进行船舶运动的控制。半潜船运动导引律设计思路如下:
[0065]
第一,半潜船动力学方程如下:
[0066][0067]
式中:h
xt
、h
yt
、h
nt
——作用在船体上力和力矩;
[0068]
x
g
——船舶重心在x轴方向上的位置坐标。
[0069]
第二,由公式(1)可以得到船舶的加速度及角加速度,积分可以求得船舶速度,控制器接收反馈信号,并由运动学方程计算固定坐标系下船舶速度,方程如下:
[0070][0071]
第三,由公式(2)可以得到固定坐标系下在三自由度方向上的船舶速度,积分可以求得船舶在固定坐标系中的位置并向控制器反馈。
[0072]
第四,由船舶期望位置和船舶实时位姿,求出导引点坐标(n
los
,e
los
)。
[0073]
为了计算出未知los点的坐标p
los
=(n
los
,e
los
),必须满足下面两式:
[0074]
(n
los
‑
n
t
)2 (e
los
‑
e
t
)2=r2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0075][0076]
式中:r——导引半径。
[0077]
另:e=n
k
,f=e
k
。
[0078]
定义下式:
[0079]
a=1 d2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0080]
b=2(dg
‑
de
t
‑
n
t
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0081][0082]
1)δn>0
[0083][0084]
e
los
=d(n
los
‑
n
k
) e
k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0085]
当δe=0时,e
los
=e
k
=e
k 1
。
[0086]
2)δn<0
[0087][0088]
e
los
=d(n
los
‑
n
k
) e
k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0089]
当δe=0时,e
los
=e
k
=e
k 1
。
[0090]
3)δn=0
[0091]
当δe=0时,e
los
=n
k
=n
k 1
。
[0092]
①
对于δe>0
[0093][0094]
②
对于δe<0
[0095][0096]
本发明中导引律为joystick auto sway&yaw模式导引律,设计方式如下:可以由auto position和joystick模式转入此模式。按下auto sway按钮和auto surge按钮后,指示灯开始闪烁,当速度比限定速度小时,auto sway按钮和auto surge按钮状态为常亮,对当前的位置和航向(n0,e0,ψ0)进行记录,此时auto sway和auto surge方向运动受限制,可操纵joystick控制船舶围绕控制点做旋转运动。此时船舶在围绕固定点的回转运动的导引律如下图1所示。
[0097]
图中,(n
t
,e
t
,ψ
t
)代表船舶当前位置,(n
d
,e
d
,ψ
d
)代表船舶的期望位置和航向;l
d
代表期望的导引路径,l
v
代表与期望路径垂直的路径,l
d
与l
v
相交点为d,代表船舶期望导引位置。
[0098]
船舶的期望航向可用下式表示:
[0099]
ψ
d
=ψ
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0100]
与上述情况类似,导引路径为:
[0101]
e
d
=e0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0102]
n
d
=n0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0103]
此种情况下的导引律由(14)、(15)和(16)组成。
[0104]
第五,pid控制的原理表达式如下:
[0105][0106]
式中:k
p
,k
i
,k
d
——各环节增益系数;k
p
——有差调节;k
i
——静差调节;k
d
——偏差变化率,
[0107]
由公式(17)进行三自由度方向上运动控制器的构建,操纵手柄能够通过对应不同的速度环来控制船舶三个自由度的速度。动力定位系统运动控制器由速度内环控制和位置外环控制来控制船舶运动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。