技术特征:
1.一种两节轮足式管道攀爬机器人,其特征在于所述两节轮足式管道攀爬机器人中:l0表示攀爬连接架(6)的长度,mm,b0表示攀爬连接架(6)的宽度,mm,h0表示攀爬连接架(6)的高度,mm;设,前攀爬机器人(1)为前方,面对两节轮足式管道攀爬机器人前部的左侧为左方;所述两节轮足式管道攀爬机器人由前攀爬机器人(1)、机器人连接件(2)和后攀爬机器人(3)组成,前攀爬机器人(1)的后端通过机器人连接件(2)与后攀爬机器人(3)的前端连接;所述前攀爬机器人(1)包括2个辅助轮(4)、2个辅助支架(5)、攀爬连接架(6)、运动控制板(7)、2个轮足复合机构(8)、锂电池(9)和2个磁吸附装置(10);在攀爬连接架(6)的前端两侧对称地固定有辅助支架(5),2个辅助支架(5)的下端与攀爬连接架(6)的下平面平齐,2个辅助支架(5)的上端分别活动地装有辅助轮(4);辅助轮(4)轴心与攀爬连接架(6)前端的水平距离l1=0.4~0.5l0,辅助轮(4)轴心与攀爬连接架(6)下平面的垂直距离h1=0.7~0.8h0;攀爬连接架(6)包括:上矩形框架(11)、下矩形框架(13)、平板(16)和4个立柱(12);上矩形框架(11)为2条横梁和2条纵梁围成的整体,上矩形框架(11)与下矩形框架(13)相同,上矩形框架(11)的4个角分别通过立柱(12)与下矩形框架(13)对应的4个角固定连接;上矩形框架(11)的2条纵梁的中间靠后处对称地设有轮足安装孔(14),2个轮足复合机构(8)分别通过螺栓与对应的轮足安装孔(14)固定连接;下矩形框架(13)的2条纵梁的中间靠后处对称地设有磁吸附装置安装孔(15),2个磁吸附装置(10)分别通过螺栓与对应的磁吸附装置安装孔(15)固定连接;下矩形框架(13)底部的中间位置处沿前后方向水平地固定有平板(16),平板(16)的上平面设置有运动控制板(7)和锂电池(9);所述轮足复合机构(8)包括前编码电机(17)、前麦克纳姆轮(18)、前连接件(19)、减震装置(20)、万向轮(21)、后连接件(22)、后麦克纳姆轮(23)和后编码电机(24);所述前连接件(19)是由前电机支架(25)、前一连杆(26)、前一轴套(27)、前二连杆(28)和万向轮连接板(29)依次由前向后固定连接;其中:前一连杆(26)为直杆,前二连杆(28)为“l”形杆件;前电机支架(25)是由水平板和垂直板组成的整体;前电机支架(25)水平板中心与前一轴套(27)轴心的垂直距离h2=0.22~0.23h0,前电机支架(25)水平板中心与前一轴套(27)轴心的水平距离l2=0.26~0.27l0,前电机支架(25)的水平板中心与前电机支架(25)垂直板右侧面的水平距离b1=0.06~0.07b0,万向轮连接板(29)右侧面中心与前一轴套(27)两端面间的中心的水平距离b2=0.15~0.16b0;前编码电机(17)与前电机支架(25)的垂直板右侧面固定连接,前编码电机(17)的输出轴穿过前电机支架(25)的垂直板与前麦克纳姆轮(18)轴连接;所述后连接件(22)是由后一轴套(30)、后一连杆(31)、后二轴套(32)、后二连杆(33)和后电机支架(34)依次由前向后固定连接;其中:
后一连杆(31)和后二连杆(33)均为直杆,后一轴套(30)轴心与后二轴套(32)轴心的垂直距离h3=0.20~0.21h0,后一轴套(30)轴心与后二轴套(32)轴心的水平距离l3=0.12~0.13l0,后电机支架(34)与前电机支架(25)的结构相同,后电机支架(34)的水平板中心与后电机支架(34)垂直板右侧面的水平距离b3=0.11~0.12b0;后编码电机(24)与后电机支架(34)的垂直板右侧面固定连接,后编码电机(24)的输出轴穿过后电机支架(34)的垂直板与后麦克纳姆轮(23)轴连接;所述减震装置(20)包括减震安装板(35)、弧形内挡板(37)、弧形外挡板(38)、弹簧(39)、减震安装座(40)和支架轴(41);减震安装板(35)的下平面中心对称地装有弧形内挡板(37),减震安装座(40)的上平面中心对称地装有弧形外挡板(38),弧形外挡板(38)的内表面曲率半径与弧形内挡板(37)的外表面曲率半径的名义尺寸相同,弧形外挡板(38)的内表面弧长和弧形内挡板(37)的外表面弧长均为0.6~0.7πr,r表示弧形外挡板(38)的内表面曲率半径,弧形内挡板(37)的外表面和弧形外挡板(38)的内表面滑动连接;减震安装板(35)和减震安装座(40)之间装有弹簧(39),弹簧(39)位于弧形内挡板(37)和弧形外挡板(38)的中心位置处内,弧形外挡板(38)和弧形内挡板(37)的高度均为减震安装板(35)下平面与减震安装座(40)上平面间距离的60~70%;减震安装座(40)右侧面的中心位置处固定有支架轴(41);所述轮足复合机构(8)的结构是,前一轴套(27)通过销轴与后一轴套(30)活动连接,万向轮(21)的轮架与万向轮连接板(29)下平面连接,后二轴套(32)与减震装置(20)的支架轴(41)活动连接;减震安装板(35)设有轮足连接通孔(36),轮足连接通孔(36)通过螺栓与攀爬连接架(6)的轮足安装孔(14)固定连接;所述磁吸附装置(10)包括六角法兰面螺母(42)、矩形支架(43)、沉头螺杆(44)、六角螺母(46)和永磁铁(47);矩形支架(43)是由2个条形板和2个矩形块围成的整体式矩形框架,矩形支架(43)的上条形板沿垂直方向均匀地设有4~6个螺孔,下条形板沿垂直方向对应地设有4~6个通孔,4~6个螺孔中心线分别与对应的通孔中心线为同一直线;沉头螺杆(44)的头部一端通过六角螺母(46)与永磁铁(47)固定连接,沉头螺杆(44)的另一端依次穿过下条形板的通孔和上条形板的螺孔通过六角法兰面螺母(42)固定于矩形支架(43)的上平面;两个矩形块的中心位置处沿水平方向对称地设有吸附连接通孔(45),吸附连接通孔(45)通过螺栓与磁吸附装置安装孔(15)固定连接;后攀爬机器人(3)与前攀爬机器人(1)结构相同;所述机器人连接件(2)包括2个横向连杆(48)和1个纵向连杆(49);纵向连杆(49)的两端对称地铰接有横向连杆(48),纵向连杆(49)的两端分别位于横向连杆(48)的中间位置处,2个横向连杆(48)的长度与攀爬连接架(6)前侧或后侧的2个立柱(12)间的距离相同;1个横向连杆(48)固定于前攀爬机器人(1)后侧的2个立柱(12)的中间位置处,另1个横向连杆(48)固定于后攀爬机器人(3)前侧的2个立柱(12)的中间位置处;运动控制板(7)的连接关系是:锂电池(9)的正极和负极与运动控制板(7)电源接口的正极和负极对应连接,运动控制板(7)的usb接口与pc上位机的usb接口连接;左前编码电机(50)与运动控制板(7)的电机接口1连接,右前编码电机(53)与运动控制板(7)的电机接口2
连接,左后编码电机(51)与运动控制板(7)的电机接口3连接,右后编码电机(52)与运动控制板(7)的电机接口4连接;所述2个轮足复合机构(8)为左轮足复合机构和右轮足复合机构:相应地,前编码电机(17)为左前编码电机(50)和右前编码电机(53);后编码电机(24)为左后编码电机(51)和右后编码电机(52)。2.根据权利要求1所述两节轮足式管道攀爬机器人,其特征在于所述前电机支架(25)的水平板中心是指前电机支架(25)水平板与前一连杆(26)固定连接所形成的连接面的形心。3.根据权利要求1所述两节轮足式管道攀爬机器人,其特征在于所述后电机支架(34)的水平板中心是指后电机支架(34)水平板与后二连杆(33)固定连接所形成的连接面的形心。
技术总结
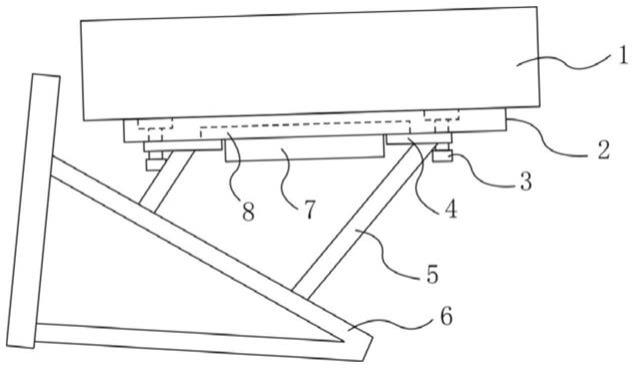
本发明公开了一种两节轮足式管道攀爬机器人。其技术方案是:前攀爬机器人(1)与后攀爬机器人(3)通过机器人连接件(2)连接而成,前攀爬机器人(1)与后攀爬机器人(3)结构相同。前攀爬机器人(1)前端两侧通过对称固定的辅助支架(5)分别装有辅助轮(4);前攀爬机器人(1)两侧对称地装有轮足复合机构(8)和磁吸附装置(10)。轮足复合机构(8)的2个编码电机通过联轴器与对应的麦克纳姆轮连接;分别控制2个编码电机能实现对应的麦克纳姆轮按特定转向转动,从而实现前攀爬机器人(1)前后左右方向的运动。轮足复合机构(8)的减震装置(20)连接在攀爬连接架(6)上,能使两节轮足式管道攀爬机器人在管道外壁平稳运动。本发明具有越障能力强、稳定性高和适应范围广的特点。稳定性高和适应范围广的特点。稳定性高和适应范围广的特点。
技术研发人员:侯宇 李浩男 蒋怡蔚 江厚清 金子涵
受保护的技术使用者:武汉科技大学
技术研发日:2021.08.03
技术公布日:2021/11/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。