1.本技术涉及光缆收放技术领域,尤其涉及一种光缆收线设备。
背景技术:
2.光缆一种是为了满足光学、机械或环境的性能规范而制造的通信线缆,一般包括护套以及包覆于护套中的一根或多根光纤。光缆在生产加工完成后,通常借助光缆收线设备收卷光缆,使光缆整齐、有序地绕卷于收卷筒的外周侧,便于光缆的销售以及光缆的后续使用。
3.现有的光缆收线设备一般包括机架、架设并转动安装于机架的转动辊以及固定连接于转动辊、用于驱使转动辊转动的驱动电机;通过将收卷筒套装于转动辊,控制驱动电机带动收卷筒转动,能够使光缆逐渐收卷于收卷筒的外周侧。
4.针对上述中的相关技术方案,发明人认为存在以下缺陷:驱动电机带动收卷筒转动时,需要操作人员时刻关注光缆绕卷于收卷筒后的位置,并且通过手动调节光缆的位置才能使光缆整齐、有序地绕卷于收卷筒的外周侧,导致操作人员在整个操作过程中的劳动强度较大。
技术实现要素:
5.为了减轻操作人员的劳动强度,本技术提供了一种光缆收线设备。
6.本技术提供的一种光缆收线设备采用如下技术方案:一种光缆收线设备,包括机架,所述机架安装有收卷筒以及用于驱使收卷筒收卷光缆的驱动装置。
7.所述驱动装置包括两个夹紧臂以及设置于两个夹紧臂之间的固定座,所述固定座以及两个夹紧臂分别滑动安装于机架;所述固定座安装有第一驱动组件,两个所述夹紧臂分别螺纹连接有第一丝杆,两根所述第一丝杆分别连接于第一驱动组件,所述第一驱动组件驱使两根第一丝杆同时转动,且两根所述第一丝杆的转动方向反向设置。
8.所述机架还转动安装有第二丝杆,所述第二丝杆与固定座之间螺纹连接;所述第二丝杆的一端连接有用于驱使第二丝杆转动的第二驱动组件。
9.两个所述夹紧臂的相对侧分别转动安装有限位凸块,所述限位凸块位于夹紧臂的底部,其中一所述限位凸块连接有用于驱使限位凸块转动的第三驱动组件;所述收卷筒的两侧分别设有与限位凸块相匹配的限位槽。
10.通过采用上述的技术方案,本技术通过第一驱动组件驱使两根第一丝杆沿相反的方向转动,从而带动两个夹紧臂沿第一丝杆的轴线方向相互靠近或相互远离;当两个夹紧臂相互靠近时,两个夹紧臂上的限位凸块能够分别插入收卷筒两侧的限位槽内,从而使两个限位凸块能够共同夹紧收卷筒,方便收卷筒的安装和固定;然后控制第三驱动组件运作,第三驱动组件能够驱使限位凸块带动收卷筒转动,从而将光缆绕卷于收卷筒的外周侧。
11.另外,在收卷筒转动的同时,控制第二驱动组件运作,第二驱动组件能够带动固定
座以及两个夹紧臂共同沿着第二丝杆的轴线方向移动,进而带动收卷筒沿自身的轴向方向缓慢移动,使光缆绕卷于收卷筒的位置能够不断改变,减少了操作人员手动调节光缆绕卷位置的时间,有利于减轻操作人员的劳动强度。
12.可选的,两根所述第一丝杆同轴设置且分别位于固定座的两侧;所述第一驱动组件包括安装于固定座的第一电机、固定连接于第一电机输出轴的第一锥齿轮以及分别固定连接于第二丝杆一端端部的两个第二锥齿轮,所述第一锥齿轮同时与两个第二锥齿轮相啮合。
13.通过采用上述的技术方案,第一电机控制第一锥齿轮转动时,位于第一锥齿轮两侧、分别与第一锥齿轮啮合的两个第二锥齿轮能够绕相反的方向转动,从而使两根第一丝杆能够沿相反的方向转动,进而带动两个夹紧臂沿第一丝杆的轴线方向相互靠近或相互远离。
14.可选的,每一所述夹紧臂均包括移动子臂和抬升子臂,所述移动子臂滑动安装于机架,所述第一丝杆螺纹连接于移动子臂;所述移动子臂沿自身延长方向设有活动槽,所述抬升子臂活动安装于活动槽,所述限位凸块安装于抬升子臂的底部;所述抬升子臂连接有用于驱使抬升子臂在活动槽内移动的第四驱动组件。
15.通过采用上述的技术方案,当第一驱动组件驱使两个夹紧臂共同夹持住收卷筒时,控制第四驱动组件运作,第四驱动组件能够带动抬升子臂在活动槽内移动,从而将抬升子臂升高;抬升子臂带动收卷筒上升并离开地面,极大地降低了收卷筒与地面之间的摩擦力,方便第三驱动组件带动收卷筒转动,有利于延长第三驱动组件的使用寿命。
16.可选的,所述移动子臂朝向相邻移动子臂的一侧固定有安装盒,所述安装盒的底部设有中空腔室,所述中空腔室内充满有热熔胶体;所述中空腔室内活动安装有活动板,所述活动板正对于收卷筒的外侧;所述中空腔室的内侧壁设有延伸至安装盒底部的出胶通道,所述出胶通道位于中空腔室背离移动子臂的一侧。
17.通过采用上述的技术方案,当收卷筒已经收卷足够的光缆、需要更换新的收卷筒时,可以通过控制第四驱动组件使抬升子臂带着收卷筒向上移动,最后收卷筒的外侧能够推动活动板向上移动,从而将中空腔室内的热熔胶体通过出胶通道挤出;挤出后的热熔胶体落在收卷筒外周侧、已经收卷完成的光缆上,从而将光缆固定并使光缆保持良好的紧绷性,方便后续光缆的切割和包膜。另外,采用的热熔胶体粘度较低,易于剥离,方便后续人们使用光缆时将热熔胶剥离并将光缆放卷。
18.可选的,所述中空腔室内设置有可活动的隔板,所述隔板将中空腔室分隔成胶室和安装室,所述胶体设置于胶室内,所述出胶通道连通于胶室;所述出胶通道内连接有用于添加热熔胶液的进胶管,所述安装室内安装有弹性件,所述弹性件连接于活动板,所述弹性件使活动板常态位于中空腔室的开口处。
19.通过采用上述的技术方案,当收卷筒的外侧抵于活动板并向上推动活动板时,活动板能够挤压弹性件使弹性件发生弹性形变,并将热熔胶体从出胶通道挤出;当收卷筒离开活动板时,活动板在弹性件的弹性力作用下重新移动至中空腔室的开口处,同时能够使进胶管内的热熔胶不断补充进入胶室内部,方便下次使用。
20.可选的,所述安装盒的底部固定有两个护板,两个所述护板之间形成用于定位光缆的定位通道,其中一个所述护板设有贯穿护板两侧的进刀槽;所述安装盒的外侧固定有
气缸,所述气缸位于两个护板的上方,所述气缸的活塞杆连接有切割刀,所述切割刀活动位于进刀槽,用于切断光缆。
21.通过采用上述的技术方案,当第四驱动组件驱使收卷筒上升并挤压活动板时,光缆进入两个护板形成的定位通道之间;通过控制气缸动作,气缸的活塞杆能够带动切割片进入进刀槽并自动将光缆切断,使光缆与收卷筒分离,提高了收卷筒更换的便利性。
22.可选的,所述切割刀的底部固定有用于将光缆定位于定位通道内的限位板,所述限位板位于护板的下方。
23.通过采用上述的技术方案,限位板的设置能够降低切割刀切断光缆时光缆受力脱离定位通道的可能性,使切割刀能够良好地切断光缆。
24.可选的,所述机架的两侧分别安装有铰接座,两个所述铰接座分别转动连接有转动杆,每一所述转动杆背离铰接座的一端均固定有半环形的连接片,两所述连接片相互连接共同形成有用于使光缆穿过的套环。
25.通过采用上述的技术方案,两个连接片相互连接后形成套环,将两个连接片相互分离,能够方便地将光缆安装于套环内,并使光缆穿过套环;套环相对于机架始终处于固定的位置,当第二驱动组件带动收卷筒沿自身的轴向方向缓慢移动时,穿过套环的光缆与收卷筒之间始终处于接近垂直的状态,有利于提高收卷筒将光缆收卷后的平整性。
26.可选的,两个所述铰接座分别滑动安装于机架;每一所述抬升子臂均设有用于定位铰接座的延伸块,两根所述转动杆分别抵靠于两个延伸块。
27.通过采用上述的技术方案,延伸块的设置能够在第四驱动组件驱使抬升子臂上升时带动转动杆以及铰接座一起上升,使套环与收卷筒的相对位置保持不变,能够进一步有利于提高收卷筒将光缆收卷后的平整性。
28.可选的,每一所述转动杆均安装有配重块,所述配重块使转动杆始终抵靠于延伸块。
29.通过采用上述的技术方案,配重块的设置使转动杆在自身重力作用下以及配重块的重力作用下始终抵靠于延伸块,减少收卷筒收卷光缆时光缆带着连接片以及转动杆向上移动、发生跳动的情况,能够进一步提高收卷筒将光缆收卷后的平整性。
30.综上所述,本技术包括以下至少一种有益技术效果:1.收卷筒收卷光缆时,第二驱动组件驱使两个夹紧臂带动收卷筒沿自身的轴向方向缓慢移动,能够减少操作人员手动调节光缆绕卷位置的时间,减轻操作人员的劳动强度;2.通过第四驱动组件驱使抬升子臂升高,能够使收卷筒上升并离开地面,极大地降低收卷筒与地面之间的摩擦力,方便第三驱动组件带动收卷筒转动;3.通过控制第四驱动使抬升子臂带着收卷筒向上移动,收卷筒推动活动板向上移动并将热熔胶体从出胶通道挤出,能够将光缆固定并使光缆保持良好的紧绷性;4.通过控制气缸动作,气缸的活塞杆能够带动切割片进入进刀槽并自动将光缆切断,使光缆与收卷筒分离,提高了收卷筒更换的便利性。
附图说明
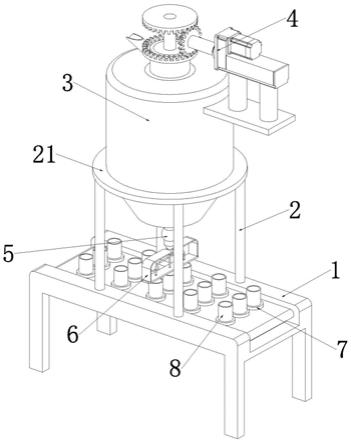
31.图1是本技术实施例1中夹紧臂夹紧收卷筒时的结构示意图;图2是本技术实施例1中壳体的剖视图,主要体现第一驱动组件的结构;
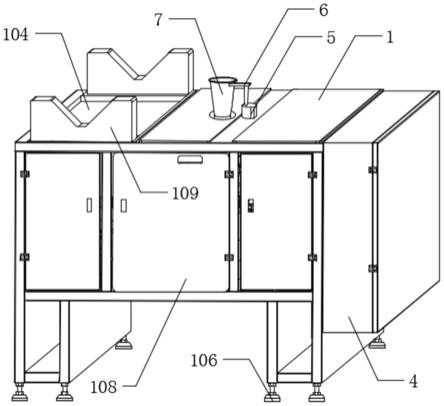
图3是本技术实施例1中夹紧臂与第四驱动组件的结构示意图;图4是本技术实施例1中夹紧臂卸下收卷筒时的结构示意图;图5是本技术实施例2的整体结构示意图;图6是图5中a
‑
a向的剖视图,主要体现中空腔室的结构;图7是本技术实施例2中安装盒另一方向的剖视图;图8是图5中b处的放大图;图9是图5中c处的放大图,主要体现套环的结构。
32.附图标记说明:1、机架;11、立柱;12、横梁;13、加强柱;14、第一滑轨;15、第二丝杆;16、第二驱动组件;17、第二滑轨;2、固定座;21、第一滑移座;22、保护罩;23、第一驱动组件;231、第一电机;232、第一锥齿轮;233、第二锥齿轮;24、连接板;3、夹紧臂;31、移动子臂;311、第二滑移座;312、连接座;313、第一丝杆;314、活动槽;32、抬升子臂;321、箱体;322、限位凸块;323、第三驱动组件;324、延伸块;33、第四驱动组件;331、第四电机;332、第四螺杆;4、安装盒;41、中空腔室;411、隔板;412、胶室;413、安装室;42、活动板;43、弹性件;44、进胶管;45、出胶通道;451、喷胶头;46、护板;461、定位通道;462、进刀槽;47、气缸;48、切割刀;49、限位板;5、套环;51、连接片;52、转动杆;53、铰接座;54、配重块;6、收卷筒;61、收卷辊;62、挡板;621、限位槽。
具体实施方式
33.以下结合附图1
‑
9对本技术作进一步详细说明。
34.实施例1:本技术实施例公开了一种光缆收线设备。
35.参照图1,一种光缆收线设备,包括机架1,机架1安装有收卷筒6以及用于驱使收卷筒6收卷光缆的驱动装置。
36.参照图1,机架1包括两根垂直设置的立柱11以及连接于两根立柱11顶部的若干横梁12,本实施例中横梁12的数量设置为两根,两个横梁12沿高度方向间隔设置,且两个横梁12之间垂直固定有若干加强柱13,用于提高机架1的稳固性。两根横梁12中位于上方的横梁12的顶部安装有第一滑轨14。
37.参照图1,驱动装置包括固定座2以及两个夹紧臂3,其中固定座2的顶部固定连接有第一滑移座21,固定座2通过第一滑移座21滑移安装于第一滑轨14。每一夹紧臂3均包括移动子臂31和抬升子臂32,其中抬升子臂32活动安装于移动子臂31的底部;移动子臂31的顶部固定连接有第二滑移座311,两个移动子臂31分别通过第二滑移座311滑移安装于第一滑轨14,且两个移动子臂31对称设置于固定座2的两侧。
38.参照图1,移动子臂31和固定座2均呈竖直设置;两个移动子臂31分别固定有连接座312,连接座312位于移动子臂31背离横梁12的一侧;两个连接座312分别螺纹连接有第一丝杆313,两个第一丝杆313同轴设置,且两个第一丝杆313的螺纹旋向同向设置。固定座2的底部固定有保护罩22,保护罩22安装有第一驱动组件23,两根第一丝杆313均穿设至保护罩22内部并与第一驱动组件23连接,使第一丝杆313在第一驱动组件23的驱动下转动。
39.参照图1、图2,第一驱动组件23包括第一电机231、第一锥齿轮232以及两个第二锥齿轮233。第一电机231固定于保护罩22背离固定座2的一侧,第一电机231的输出轴穿设至保护罩22内部;第一锥齿轮232固定于第一电机231输出轴的端部,两个第二锥齿轮233分别固定连接于两个第一丝杆313,且两个第二锥齿轮233同时与第一锥齿轮232相啮合。当第一电机231运作时,两个第二锥齿轮233能够沿相反的方向转动,从而使两个移动子臂31相互靠近或相互远离,进而带动两个夹紧臂3相互靠近或相互远离。
40.参照图1、图3,移动子臂31沿高度方向开设有贯穿移动子臂31上下两侧的活动槽314,活动槽314为矩形槽,抬升子臂32匹配插接于活动槽314内,使抬升子臂32能够在活动槽314内向上或向下移动。移动子臂31的顶部安装有用于驱使抬升子臂32移动的第四驱动组件33,第四驱动组件33包括第四电机331和第四螺杆332,其中第四螺杆332转动安装于活动槽314内,且第四螺杆332局部穿设于抬升子臂32并与抬升子臂32螺纹连接。第四电机331固定于移动子臂31的内部,第四电机331的输出轴与第四螺杆332之间通过锥齿轮啮合传动的方式相连接;当第四电机331运作时,第四电机331驱使第四螺杆332转动,进而使抬升子臂32在第四螺杆332的带动下在活动槽314内上升或下降。
41.参照图4,两个抬升子臂32的底部分别固定连接有箱体321,两个箱体321的相对侧分别转动安装有限位凸块322;收卷筒6包括位于中部的收卷辊61以及固定于收卷辊61轴线方向两侧的挡板62,每一挡板62均开设有与限位凸块322匹配的限位槽621。当第一电机231驱使两个抬升子臂32相互靠近时,两个限位凸块322能够对应插接于限位槽621内,从而方便地夹紧收卷筒6,实现收卷筒6的快速安装。
42.参照图4,其中一个箱体321安装有用于驱使限位凸块322转动的第三驱动组件323,本技术中的第三驱动组件323包括第三电机,第三电机的输出轴与限位凸块322之间通过锥齿轮啮合传动的方式相连接;当第三电机运作时,第三电机的输出轴能够带动与其传动连接的限位凸块322转动,从而使收卷筒6转动,并将光缆绕卷于收卷筒6的外周侧。
43.参照图4,固定座2于自身宽度方向的两侧固定有两个连接板24,两根立柱11分别固定有转动座,两个转动座之间转动连接有第二丝杆15,第二丝杆15的轴线方向呈水平设置,且第二丝杆15贯穿于两个连接板24并与连接板24螺纹连接。第二丝杆15的其中一端连接有第二驱动组件16,本技术中的第二驱动组件16为第二电机;当第二电机运作时,第二电机带动第二丝杆15转动,使固定座2以及两个移动子臂31能够一起沿着第一滑轨14缓慢移动。
44.本技术实施例1的实施原理为:该光缆收线设备运行时,首先将光缆的一端固定于收卷筒6,控制第一电机231运作,第一电机231带动两个第一丝杆313沿相反的方向转动,能够使两个夹紧臂3相互靠近;两个抬升子臂32相互靠近后,两个限位凸块322对应插入挡板62两侧的限位槽621内,从而快速地安装收卷筒6。之后控制第四电机331运作,第四电机331带动抬升子臂32沿活动槽314上升一定距离,使收卷筒6脱离地面;最后控制第三电机运作,第三电机作为动力源带动限位凸块322以及夹紧于两个限位凸块322之间的收卷筒6转动,从而将光缆绕卷于收卷筒6的外侧。
45.光缆绕卷的同时,控制第四电机331运作,第四电机331能够带动固定座2以及两个夹紧臂3一起沿第二丝杆15的轴线方向缓慢移动,使光缆绕卷于收卷筒6的位置能够不断改
变,减少了操作人员手动调节光缆绕卷位置的时间,有利于减轻操作人员的劳动强度。
46.实施例2:本技术实施例公开了一种光缆收线设备。
47.参照图5,本技术实施例公开的一种光缆收线设备与实施例1的区别在于:两个移动子臂31中其中一个移动子臂31朝向相邻移动子臂31的一侧固定有安装盒4,安装盒4的底部开设有中空腔室41,中空腔室41内部活动安装有活动板42,且活动板42正对于收卷筒6一侧的挡板62;当第四电机331带动抬升子臂32向上移动时,收卷筒6的挡板62能够抵靠于活动板42的底部并推动活动板42于中空腔室41内向上移动。
48.参照图5、图6,中空腔室41内部安装有两个间隔设置的隔板411,每一隔板411均贯穿于安装盒4的顶面,使活动板42能够推动两个隔板411于中空腔室41内向上移动。两个隔板411将中空腔室41分隔成一个胶室412以及两个安装室413,其中胶室412位于两个安装室413之间;每一安装室413内均安装有一个弹性件43,本实施例中的弹性件43设置为弹簧,当弹簧处于常态时,活动板42位于中空腔室41的开口处;当挡板62上移并推动活动板42使活动板42向上移动时,弹簧被压缩并产生弹性力,能够在挡板62离开活动板42后使活动板42重新移动至中空腔室41的开口处。
49.参照图5、图7,本实施例中的胶室412为密封区域,胶室412内充满有热熔胶体;腔室的顶部连接有用于添加热熔胶体的进胶管44,腔室的外侧开设有出胶通道45,出胶通道45位于胶室412背离相邻移动子臂31的一侧;出胶管道的出胶口还安装有喷胶头451,喷胶头451能够减少外界空气从出胶管道进入胶室412的情况,提高胶室412内部的密封性。
50.参照图6、图7,当挡板62推动活动板42向上移动时,活动板42将胶室412内的热熔胶体从出胶通道45以及喷胶头451挤出,从而使热熔胶体固定住光缆,使光缆保持良好的紧绷性;当挡板62离开活动板42时,活动板42在弹性件43的弹性力作用下重新移动至中空腔室41的开口处,同时能够使进胶管44内的热熔胶不断补充进入胶室412内部。
51.参照图5、图8,安装盒4的底部固定有两个护板46,两个护板46之间间隔设置并形成有定位通道461,当挡板62推动活动板42向上移动时,光缆能够进入两个护板46形成的定位通道461内。两个护板46中其中一个护板46的外侧面与安装盒4背离相邻移动子臂31的侧面齐平设置,该护板46开设有两侧贯穿的进刀槽462,进刀槽462的延长方向呈竖直设置。
52.参照图8,安装盒4的外侧固定有气缸47,本实施例中气缸47的活塞杆常态处于伸出状态;气缸47的活塞杆连接有切割刀48,切割刀48位于进刀槽462的外侧并正对于进刀槽462。通过控制气缸47动作使气缸47的活塞杆缩回,气缸47能够带动切割刀48进入进刀槽462内,使切割刀48将定位通道461内的光缆切断。
53.参照图8,本实施例中的进刀槽462贯通于护板46的底部,切割刀48的底部焊接固定有限位板49,限位板49位于护板46的下方,且限位板49的长度大于切割刀48的长度。当气缸47动作时,限位板49先于切割刀48进入定位通道461的下方,用于降低光缆脱离定位通道461的可能性;然后切割刀48进入进刀槽462内,将定位通道461内的光缆切断。
54.参照图5,两根立柱11分别固定有第二滑轨17,每一滑轨均位于立柱11背离移动子臂31的一侧;第二滑轨17的延长方向与竖直方向同向竖直。两个第二滑轨17分别安装有铰接座53,铰接座53能够沿滑轨的延长方向移动;两个铰接座53分别转动连接有转动杆52。
55.参照图5、图9,每一转动杆52背离对应连接的铰接座53的一端均焊接固定有连接
片51,连接片51设置为半环形,两个连接片51之间通过紧固件固定连接,从而使两个连接片51共同形成套环5,光缆能够穿过套环5。当第二电机带动收卷筒6沿自身的轴向方向缓慢移动时,穿过套环5的光缆收卷筒6之间始终处于接近垂直的状态,提高了收卷筒6将光缆收卷后的平整性;而且当第四电机331将抬升子臂32抬升时,光缆能够更容易进入定位通道461内部。
56.参照图5,两个箱体321的外侧分别固定有延伸块324,延伸块324位于箱体321朝向连接杆的一侧;两根转动杆52在自身重力作用下始终抵于两个延伸块324,当第四电机331带动抬升子臂32上升时,延伸块324能够带着转动杆52沿第二滑轨17的延长方向上升,从而使套环5与收卷筒6的相对位置保持不变。本实施例中与两根连接杆分别固定有配重块54,配重块54的重力能够向下作用于转动杆52,从而使转动杆52始终抵于延伸块324,有利于降低收卷筒6收卷光缆时光缆带动套环5向上移动、进而使转动杆52出现跳动的可能性。
57.本技术实施例2的实施原理为:当收卷筒6将光缆收卷完成后,通过控制第四电机331运作,第四电机331带动抬升子臂32继续向上运动,从而将收卷筒6抬升;收卷筒6外侧的挡板62抵于活动板42并推动活动板42向上移动,将胶室412内部的热熔胶条从出胶通道45挤出,从而将收卷后的光缆固定。后续控制气缸47动作,使气缸47带动切割刀48插入进刀槽462内,能够自动将光缆切断,使光缆与收卷筒6分离,提高了收卷筒6更换的便利性。
58.以上为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。