1.本发明属于夹取设备技术领域,具体涉及一种电路板夹取机器人。
背景技术:
2.集成电路板是装载集成电路的载体,按照不同的需求,在集成电路上安装电阻器、电容器等元器件,利用多层布线或隧道布线方法将元器件组合成完整的集成电路板。
3.目前常见的集成电路板夹取装置主要对生产线上的电路板进行加持,且只能根据同一类型的电路板进行夹持,无法对型号不同的电路板进行夹持,且电路板上有很多元器件,在对电路板夹持的过程中,由于元器件与夹臂之间接触挤压,容易造成元器件的损坏。
技术实现要素:
4.发明目的:提供一种电路板夹取机器人,解决了现有技术存在的上述问题。
5.技术方案:一种电路板夹取机器人,包括底座;转动臂,转动安装在所述底座上;夹取组件,包括安装在所述转动臂上的电动推杆,安装在所述电动推杆上的壳体,滑动安装在所述壳体内的一对夹臂,以及可拆卸安装在每个所述夹臂上的弹性保护层;利用电动推杆带动夹臂在壳体上进行移动,对电路板进行夹取移动。
6.采用上述技术方案:利用转动臂在底座上进行转动,带动夹取组件进行移动,使夹取组件移动至电路板附近,并利用电动推杆带动夹臂在壳体上进行滑动,对电路板进行夹取,并利用弹性保护层对电路板上的元器件进行保护,避免夹臂对元器件进行挤压导致元器件的损坏。
7.优选的,所述夹取组件还包括固定安装在所述电动推杆上的定位板,转动安装在所述定位板上的传动板,以及转动安装在所述转动板另一端上的异形齿轮;所述异形齿轮与所述夹臂啮合连接,利用电动推杆与异形齿轮相互配合,带动夹臂在壳体上移动,利用异形齿轮与夹臂啮合连接,能够精准的控制夹臂的移动位置,避免夹臂相互之间移动过快,导致电路板上的元器件挤压损坏。
8.优选的,所述弹性保护层为一个整体可拆卸连接在一对夹臂上,所述弹性保护层中央可拆卸连接在所述电动推杆靠近所述夹臂一端上,电路板在进入夹臂内,避免电路板的侧壁与电动推杆之间发生碰撞,导致电路板的损坏,影响电路板后期使用。
9.优选的,所述弹性保护层上设有锯齿层,所述锯齿层位于原理夹臂的弹性保护层侧面上,利用锯齿层对电路板上的元器件进行保护。
10.优选的,还包括镶嵌在所述夹臂内的压力传感器,所述压力传感器与所述电动推杆电连接。
11.优选的,还包括设置在所述弹性保护层中央位置上的红外感应器,所述红外感应器与所述电动推杆电连接。
12.有益效果:本发明涉及一种电路板夹取机器人,利用转动臂在底座上进行转动,带
动夹取组件进行移动,使夹取组件移动至电路板附近,并利用电动推杆带动夹臂在壳体上进行滑动,对电路板进行夹取,并利用弹性保护层对电路板上的元器件进行保护,避免夹臂对元器件进行挤压导致元器件的损坏,通过电动推杆来精准的控制夹臂进行移动,对电路板进行夹取。
附图说明
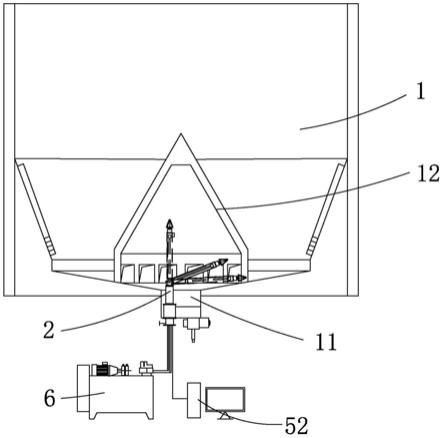
13.图1为本发明的整体结构示意图;图2为本发明的夹取组件示意图。
14.图1至图2中附图标记为:底座1、转动臂2、夹取组件3、电动推杆31、壳体32、夹臂33、弹性保护层34、定位板35、转动板36、异形齿轮37。
具体实施方式
15.在实际的应用中,申请人发现:目前常见的集成电路板夹取装置主要对生产线上的电路板进行加持,且只能根据同一类型的电路板进行夹持,无法对型号不同的电路板进行夹持,且电路板上有很多元器件,在对电路板夹持的过程中,由于元器件与夹臂之间接触挤压,容易造成元器件的损坏,针对这些问题,所以发明了一种电路板夹取机器人,能够有效的解决上述问题。
16.如图1至图2所示,一种可全方位调节的焊接机器人,以下简称“该装置”。该装置性包括底座1,所述底座1上转动安装转动臂2,夹取组件3,所述转动臂2上安装有夹取组件3,所述夹取组件3包括电动推杆31,所述电动推杆31上安装壳体32,所述壳体32内滑动安装有一对夹臂33,每个所述夹臂33上可拆卸安装弹性保护层34,利用电动推杆31带动夹臂33在壳体32上进行移动,对电路板进行夹取移动。
17.采用上述技术方案:利用转动臂2在底座1上进行转动,带动夹取组件3进行移动,使夹取组件3移动至电路板附近,并利用电动推杆31带动夹臂33在壳体32上进行滑动,对电路板进行夹取,并利用弹性保护层34对电路板上的元器件进行保护,避免夹臂33对元器件进行挤压导致元器件的损坏。
18.为了能对电路板进行精准的夹取同时,避免对电路板造成损坏,所述夹取组件3还包括定位板35,所述定位板35固定安装在所述电动推杆31上,所述定位板35上转动安装传动板,所述转动板36另一端上转动安装异形齿轮37,所述异形齿轮37与所述夹臂33啮合连接,所述夹臂33内镶嵌压力传感器,所述压力传感器与所述电动推杆31电连接,利用电动推杆31与异形齿轮37相互配合,带动夹臂33在壳体32上移动,利用异形齿轮37与夹臂33啮合连接,能够精准的控制夹臂33的移动位置,避免夹臂33相互之间移动过快,导致电路板上的元器件挤压损坏。
19.由于对电路板夹取时,电路板需要深入夹臂33之间,在电路板进入时,电路板的端部容易与电动推杆31发生碰撞,为了避免电路板与电动推杆31发生碰撞造成电路板的损坏,所述弹性保护层34为一个整体可拆卸连接在一对夹臂33上,所述弹性保护层34中央可拆卸连接在所述电动推杆31靠近所述夹臂33一端上,所述弹性保护层34中央位置上设置红外感应器,所述红外感应器与所述电动推杆31电连接,电路板在进入夹臂33内,避免电路板的侧壁与电动推杆31之间发生碰撞,导致电路板的损坏,影响电路板后期使用。
20.在进一步实施例中,所述弹性保护层34上设有锯齿层,所述锯齿层位于原理夹臂33的弹性保护层34侧面上,利用锯齿层对电路板上的元器件进行保护。
21.以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
技术特征:
1.一种电路板夹取机器人,其特征在于,包括:底座;转动臂,转动安装在所述底座上;夹取组件,包括安装在所述转动臂上的电动推杆,安装在所述电动推杆上的壳体,滑动安装在所述壳体内的一对夹臂,以及可拆卸安装在每个所述夹臂上的弹性保护层;利用电动推杆带动夹臂在壳体上进行移动,对电路板进行夹取移动。2.根据权利要求1所述的一种电路板夹取机器人,其特征在于,所述夹取组件还包括固定安装在所述电动推杆上的定位板,转动安装在所述定位板上的传动板,以及转动安装在所述转动板另一端上的异形齿轮;所述异形齿轮与所述夹臂啮合连接,利用电动推杆与异形齿轮相互配合,带动夹臂在壳体上移动。3.根据权利要求1所述的一种电路板夹取机器人,其特征在于,所述弹性保护层为一个整体可拆卸连接在一对夹臂上,所述弹性保护层中央可拆卸连接在所述电动推杆靠近所述夹臂一端上。4.根据权利要求1所述的一种电路板夹取机器人,其特征在于,所述弹性保护层上设有锯齿层,所述锯齿层位于原理夹臂的弹性保护层侧面上。5.根据权利要求1所述的一种电路板夹取机器人,其特征在于,还包括镶嵌在所述夹臂内的压力传感器,所述压力传感器与所述电动推杆电连接。6.根据权利要求1所述的一种电路板夹取机器人,其特征在于,还包括设置在所述弹性保护层中央位置上的红外感应器,所述红外感应器与所述电动推杆电连接。
技术总结
本发明公开了一种电路板夹取机器人,属于夹取设备技术领域。包括底座,转动安装在所述底座上的转动臂,安装在所述转动臂上的夹取组件;所述夹取组件包括安装在所述转动臂上的电动推杆,安装在所述电动推杆上的壳体,滑动安装在所述壳体内的一对夹臂,以及可拆卸安装在每个所述夹臂上的弹性保护层;利用电动推杆带动夹臂在壳体上进行移动,对电路板进行夹取移动。本发明对电路板进行夹取移动的同时避免对电路板上的元器件造成损坏。电路板上的元器件造成损坏。电路板上的元器件造成损坏。
技术研发人员:李振 孔坚斌 王超
受保护的技术使用者:南京昱晟机器人科技有限公司
技术研发日:2021.08.12
技术公布日:2021/11/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。