1.本发明涉及仿真控制技术,尤其涉及一种无人艇自主航行控制算法仿真评估系统。
背景技术:
2.随着军、民无人艇技术的发展,无人艇自主控制器成为无人艇技术的核心,用于支持无人艇在各种任务场景下的动作。随着无人艇的使用场景的不断增加和变换,无人艇的使用环境变得更加的复杂,无人艇自主控制算法的开发、调试以及部署问题变得异常的复杂。比如,当无人艇自主控制系统需要满足10条以上无人艇避障任务时,无人艇的避障算法需要在实际试验中多次迭代调试,才能固化为稳定版本。然而,每增加一次类似的任务,无人艇自主航控系统的开发、调试以及部署代价是高昂的、无法接受的,这将极大的制约无人艇实艇在实际任务中的普及以及自身算法的迭代速度。为使自主航控系统能力尽快的满足不同任务场景及复杂环境,必须尽可能少的依赖实物环境(比如实艇、实际目标等),以保证开发人员可以在不受场地及资源的影响下开发、调试及部署相应算法。
3.为此,就需要针对之前主要依赖的实物环境进行建模,构建一种不依赖实物的仿真环境,但是依然保持真实的航行控制器、真实岸端操控软件以及真实的通信协议。自主控制器开发人员可以完全与实艇一样通过岸端操控软件下达任务、监控船端状态等;可以与实艇中一样的自主控制器硬件上开发及调试软件。一致的通信协议,可以让调试人员在于实艇上相同的软件环境中进行开发,并在完成后直接部署在实艇上而不需要进行修改。
技术实现要素:
4.本发明要解决的技术问题在于针对现有技术中的缺陷,提供一种无人艇自主航行控制算法仿真评估系统。
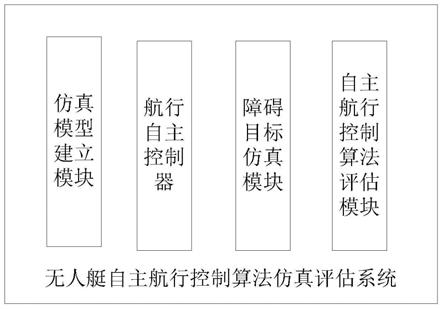
5.本发明解决其技术问题所采用的技术方案是:一种无人艇自主航行控制算法仿真评估系统,包括:
6.待测试的航行自主控制器,用于按照无人艇通信协议分别与无人艇运动学模型以及无人艇操控软件进行通信;所述无人艇操控软件为航迹跟踪算法、动态避障算法、目标跟踪算法在内的自主航行控制算法运行软件;
7.仿真模型建立模块,用于建立无人艇运动学模型和影响无人艇运动的环境模型;
8.所述无人艇运动学模型的模型输入为无人艇操控软件按照规定协议输出的期望航向及期望航速;无人艇运动学模型的模型输出为向航行自主控制器输出当前航速、航向、经纬度信息;
9.障碍目标仿真模块,用于根据障碍目标的经纬度、航速、航向、大小、障碍类型,模拟无人艇感知系统输出的障碍目标报文;
10.自主航行控制算法评估模块,用于根据无人艇自主航行控制任务对自主航行控制算法进行评估;所述无人艇自主航行控制任务包括航迹跟踪、动态避障及目标跟踪任务;
11.所述自主航行控制算法评估模块包括:
12.航迹跟踪算法评估子模块,用于根据每个控制周期t获取一次规划航迹数据、模拟障碍目标数据和无人艇状态数据对航迹跟踪算法进行评估;
13.评估值的计算方式为:
[0014][0015]
其中,m1为从起始点至终点设置的观测点个数;u
n
为第n个观测点处无人艇实际位置与规划位置的偏差;u
max
为整段航迹中的最大偏差值;δt为从起始点至终点的总耗时;s为从起始点至终点的总长度;σ1,σ2,σ3为加权比例系数,其中σ1 σ2 σ3=1并且0≤σ1,σ2,σ3≤1;
[0016]
动态避障算法评估子模块,用于根据每个控制周期t获取一次规划航迹数据、模拟障碍目标数据和无人艇状态数据对航迹跟踪算法进行评估;
[0017]
评估值的计算方式为:
[0018][0019]
其中,m2为从起始点至终点的模拟障碍目标数量;g
n
为本艇距离第n个模拟障碍目标的距离;r为避障半径;g
min
为整段避障中的距离模拟障碍最近距离;δt为从起始点至终点的总耗时;s为从起始点至终点的总长度;σ4,σ5,σ6为加权比例,其中σ4 σ5 σ6=1并且0≤σ4,σ5,σ6≤1;
[0020]
目标跟踪算法评估子模块,用于根据每个控制周期t获取一次规划航迹数据、模拟障碍目标数据和无人艇状态数据对目标跟踪算法进行评估;
[0021]
评估值的计算方式为:
[0022][0023]
其中,m3为从稳定跟踪后,无人艇脱离跟踪区域的次数;t
n
为第n次偏离跟踪区域的时间;δt
l
为稳定跟踪后到结束状态所花时间;δt
s
为从发现目标到第一次稳定跟踪状态所花事假;σ7,σ8为加权比例,其中σ7 σ8=1并且0≤σ7,σ8≤1。
[0024]
本发明产生的有益效果是:
[0025]
1、本发明不依赖自主控制器软硬件的类型,并通过建立无人艇本艇模型、环境模型、模拟目标模型,使无人艇自主航行控制器(软件、硬件)在没有实艇的状态下,可以运行、调试及评估;并且软件硬件定型后可直接用于实艇,无需改动,加快无人艇软硬件开发迭代速度。
附图说明
[0026]
下面将结合附图及实施例对本发明作进一步说明,附图中:
[0027]
图1是本发明实施例的结构示意图;
[0028]
图2是本发明实施例的无人艇运动学模型示意图;
[0029]
图3是本发明实施例的无人艇障碍目标设置流程示意图。
具体实施方式
[0030]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0031]
如图1所示,一种无人艇自主航行控制算法仿真评估系统,包括:
[0032]
待测试的航行自主控制器,用于按照无人艇通信协议分别与无人艇运动学模型以及无人艇操控软件进行通信;
[0033]
仿真模型建立模块,用于建立无人艇运动学模型和影响无人艇运动的环境模型;
[0034]
所述无人艇运动学模型的模型输入为无人艇操控软件按照规定协议输出的期望航向及期望航速;无人艇运动学模型的模型输出为向航行自主控制器输出当前航速、航向、经纬度信息;
[0035]
本实施例中,建立模型的过程如下:
[0036]
1)建立基于无人艇实际参数的无人艇运动学模型
[0037]
首先,建立无人艇本艇模型,包含模拟船体、惯导等信息;模型输入为航行自主控制软件按照规定协议输出的期望航向及期望航速;模型输出为按照船用惯导协议向航行自主控制器输出的当前航速、航向、经纬度等相关信息。
[0038]
表1无人艇模型相关变量及参数说明
[0039]
[0040][0041]
1.1)无人艇当前航速计算
[0042]
设置单个控制周期允许的最大速度变化为δv=t*2。则当|v
exp
‑
v
last
|≤δv时,v
cur
=v
exp
;当v
exp
>v
last
,v
cur
=v
exp
δv;当v
exp
<v
last
,v
cur
=v
exp
‑
δv;
[0043]
1.2)无人艇当前舵角计算
[0044]
设置单个控制周期允许的最大舵角变化为当|α
exp
‑
α
last
|≤δα时,α
cur
=α
exp
;当α
exp
>α
last
,α
cur
=α
exp
δα;当α
exp
<α
last
,α
cur
=α
exp
‑
δα;
[0045]
1.3)经纬度及航向更新
[0046]
将无人艇运动简化为由后轮打角及驱动的刚性连接结构。如图2所示。
[0047]
其中,r为旋转半径:
[0048][0049]
则无人艇运动学模型状态更新关系式为:
[0050]
1、当α>0时;
[0051]
当
[0052][0053][0054]
当或者
[0055][0056][0057]
则:
[0058][0059]
如果β2≥2π,则β2=β2‑
2π;当
[0060][0061][0062]
当或者或者
[0063][0064]
2、当α<0时;
[0065]
当
[0066][0067]
[0068]
当或者或者
[0069][0070][0071]
如果β2<0,则β2=β2 2π;当
[0072][0073][0074]
当或者
[0075][0076][0077]
3、当α=0时;
[0078]
r=v
cur
*t
[0079]
β2=β1[0080]
当0≤β2<π,
[0081][0082]
y2=y1 rcos(β2)
[0083]
当π≤β2<2π,
[0084][0085]
y2=y1 rcos(β2)
[0086]
2)建立影响无人艇运动的环境模型
[0087]
无人艇在海上巡航执行任务时,不可避免的会受到洋流、气象等因素的影响,会对船体上产生环境干扰力(力矩)。风、浪、流这些具有随机性的干扰,没有规律可循。在进行无人艇建模时,需要模拟这些环境干扰的产生,考虑环境干扰量对无人艇产生的运动干扰。
[0088]
定义无人艇受到的环境干扰力矩τ
d
,单位为n.m,τ
d
=(τ
dx
,τ
dy
,τ
dz
)
t
[0089]
τ
d
=τ
wi
τ
str
τ
wa
[0090]
式中τ
wi
,τ
str
,τ
wa
分别代表着风、浪、流对无人艇的干扰转矩。
[0091]
障碍目标仿真模块,用于根据障碍目标的经纬度、航速、航向、大小、障碍类型,模拟无人艇感知系统输出的障碍目标报文;
[0092]
该功能模块用于模拟无人艇感知系统输出的目标报文,其中包含目标的经纬度、
航速、航向、大小、障碍类型等。由于感知系统对目标检测存在一定偏差或者几率,模拟无人艇感知系统输出的障碍目标报文将参考真实感知系统输出结果,将经纬度在真实值
±
10m内取任意值、航向在真实值
±
15
°
内取任意值、航速在真实值
±
7kn内取任意值;且设置无人艇存在5%的概率无法上报目标。无人艇障碍目标设置模拟流程如图3所示。
[0093]
自主航行控制算法评估模块,用于根据无人艇自主航行控制任务对自主航行控制算法进行评估;
[0094]
所述自主航行控制算法评估模块包括:
[0095]
航迹跟踪算法评估子模块,用于根据每个控制周期t获取一次规划航迹数据、模拟障碍目标数据和无人艇状态数据对航迹跟踪算法进行评估;
[0096]
评估值的计算方式为:
[0097][0098]
其中,m1为从起始点至终点设置的观测点个数;u
n
为第n个观测点处无人艇实际位置与规划位置的偏差;u
max
为整段航迹中的最大偏差值;δt为从起始点至终点的总耗时;s为从起始点至终点的总长度;σ1,σ2,σ3为加权比例系数,其中σ1 σ2 σ3=1并且0≤σ1,σ2,σ3≤1;
[0099]
动态避障算法评估子模块,用于根据每个控制周期t获取一次规划航迹数据、模拟障碍目标数据和无人艇状态数据对航迹跟踪算法进行评估;
[0100]
评估值的计算方式为:
[0101][0102]
其中,m2为从起始点至终点的模拟障碍目标数量;g
n
为本艇距离第n个模拟障碍目标的距离;r为避障半径;g
min
为整段避障中的距离模拟障碍最近距离;δt为从起始点至终点的总耗时;s为从起始点至终点的总长度;σ4,σ5,σ6为加权比例,其中σ4 σ5 σ6=1并且0≤σ4,σ5,σ6≤1;
[0103]
目标跟踪算法评估子模块,用于根据每个控制周期t获取一次规划航迹数据、模拟障碍目标数据和无人艇状态数据对目标跟踪算法进行评估;
[0104]
评估值的计算方式为:
[0105][0106]
其中,m3为从稳定跟踪后,无人艇脱离跟踪区域的次数;t
n
为第n次偏离跟踪区域的时间;δt
l
为稳定跟踪后到结束状态所花时间;δt
s
为从发现目标到第一次稳定跟踪状态所花事假;σ7,σ8为加权比例,其中σ7 σ8=1并且0≤σ7,σ8≤1。
[0107]
仿真建模参数:(1)本艇参数:某无人艇船长12.6米,控制周期10ms;(2)环境参数:风速10kn,流速0.6kn,均为由北向南;(3)模拟目标3个,由西向东,航速15节;(4)任务参数:无人艇执行避障算法调试,无人艇规划由东向西直线运动,全程s=3km,与3个目标相向而
行;(5)设置评价参数:r=50,σ4=0.2,σ5=0.1,σ6=0.7。
[0108]
根据仿真平台运行结果,仿真平台中的评估模块将对该次算法的完整运行给出评价结果。计算过程中,无人艇距离3个目标距离之和最小值为127米;距离单艇最近距离为43米;总耗时531s;则避碰算法评估结果为γ
avoid
=0.379。根据避碰算法评估结果可以横向比较各避碰算法的性能优劣程度。
[0109]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。